You might also like
- E Advanced Service Functional Blocks C-Arm C-ArmDocument78 pagesE Advanced Service Functional Blocks C-Arm C-ArmNirav Barot100% (3)
- Electric Vehicle Modelling and SimulationDocument25 pagesElectric Vehicle Modelling and SimulationLakshmanan subas chandra bose100% (1)
- Lesson Plan-Eim-4th Quarter 10&11Document15 pagesLesson Plan-Eim-4th Quarter 10&11Rolando Basi100% (1)
- Xcel Energy Carbon Report - Mar 2019Document28 pagesXcel Energy Carbon Report - Mar 2019Inoa KonsultindoNo ratings yet
- A Black and Red TriangleDocument3 pagesA Black and Red TriangleJunn Ree MontillaNo ratings yet
- Solar Photovoltaic Cells Industry WastewDocument10 pagesSolar Photovoltaic Cells Industry Wastewnithin gdNo ratings yet
- Battery Energy Storage System BESS Design For Peak PDFDocument11 pagesBattery Energy Storage System BESS Design For Peak PDFYurivilca Yurivilca GianmarcoNo ratings yet
- NFTs How To ProfitDocument10 pagesNFTs How To ProfitPardodNo ratings yet
- Dan McLean Investigation Report 1, C2022-0759Document8 pagesDan McLean Investigation Report 1, C2022-0759Darren KrauseNo ratings yet
- Post, or Distribute: The Community Development ProcessDocument33 pagesPost, or Distribute: The Community Development ProcessRoland CepedaNo ratings yet
- Chapter 8Document57 pagesChapter 8بو تركيNo ratings yet
- Statis Efek 20210331Document132 pagesStatis Efek 20210331Muhammad RidhoNo ratings yet
- F&O Daily Margin PDFDocument5 pagesF&O Daily Margin PDFArup GhoshNo ratings yet
- 10 1021@acs Iecr 0c00181Document42 pages10 1021@acs Iecr 0c00181JUAN EDUARDO LEON HUAMANINo ratings yet
- Appendix A: Answers To The Test Your Knowledge QuestionsDocument62 pagesAppendix A: Answers To The Test Your Knowledge QuestionsOtebele JemimahNo ratings yet
- Sexual abuse of females in organizations and its impact on job satisfactionDocument24 pagesSexual abuse of females in organizations and its impact on job satisfactionNatasha kumariNo ratings yet
- List of Exploration Agencies Available With IbmDocument10 pagesList of Exploration Agencies Available With IbmpavankumarNo ratings yet
- Visteon Electronics India PVT LTDDocument58 pagesVisteon Electronics India PVT LTDChandra SekharNo ratings yet
- Transmission Systems OverviewDocument168 pagesTransmission Systems Overviewriyaz ahmedNo ratings yet
- Project at A Glance: Name & Address of Unit: 90'S Pioneerr EnterpriseDocument7 pagesProject at A Glance: Name & Address of Unit: 90'S Pioneerr EnterpriseSoundayan SubramaniNo ratings yet
- Mutual Fund Analysis Trends SharekhanDocument82 pagesMutual Fund Analysis Trends SharekhanNeena AshokNo ratings yet
- RidleyWorks15 02Document112 pagesRidleyWorks15 02Sergio Omar OrlandoNo ratings yet
- Carlyle Group's 8.5x return from SBI Card IPO exitDocument3 pagesCarlyle Group's 8.5x return from SBI Card IPO exitJayash KaushalNo ratings yet
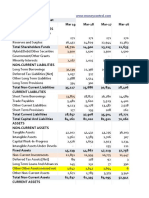
- Balance Sheet PDFDocument1 pageBalance Sheet PDFMikhil Pranay SinghNo ratings yet
- Clearing AgentsDocument59 pagesClearing AgentsDilip ParmarNo ratings yet
- Design and Fabrication of A Multilevel Inverter - Project ReportDocument70 pagesDesign and Fabrication of A Multilevel Inverter - Project ReportGadhaNo ratings yet
- Env107 Lab Report 1 of Group C FinalDocument20 pagesEnv107 Lab Report 1 of Group C FinalMayesha NuzhatNo ratings yet
- District Report Cards 2016 17 Vol IIDocument575 pagesDistrict Report Cards 2016 17 Vol IIVaranasi Region DOPNo ratings yet
- ElectromagnetismDocument45 pagesElectromagnetismNtirnyuy LeenaNo ratings yet
- Inventory Packing ListDocument1 pageInventory Packing ListRaam NaikNo ratings yet
- Poseidon - White PaperDocument52 pagesPoseidon - White PaperTrio RamosNo ratings yet
- Gensol Group Profile 2022Document19 pagesGensol Group Profile 2022Ali Imran NaqviNo ratings yet
- Stabilization of Soil by Using Polypropylene FibersDocument7 pagesStabilization of Soil by Using Polypropylene FibersIJRASETPublicationsNo ratings yet
- Carill On: High SchoolDocument19 pagesCarill On: High SchoolAndrea NegriNo ratings yet
- Journal of Catalysis (2022) - Size-Dependent Activity of Supported Ru Catalysts For Ammonia Synthesis at Mild ConditionsDocument11 pagesJournal of Catalysis (2022) - Size-Dependent Activity of Supported Ru Catalysts For Ammonia Synthesis at Mild ConditionsKatiane Mesquita100% (1)
- Anup 08 1exptDocument7 pagesAnup 08 1exptSushil JadhavNo ratings yet
- CHEM258 Chapter Summary 6Document5 pagesCHEM258 Chapter Summary 6Rainbows CupcakesNo ratings yet
- Atmos Research PaperDocument14 pagesAtmos Research PaperSowmya MahadevanNo ratings yet
- Frmat Data Permintaan Data Siswa Pip Dan Non Pip Sma Negeri 18 Maluku TengahDocument9 pagesFrmat Data Permintaan Data Siswa Pip Dan Non Pip Sma Negeri 18 Maluku TengahAhmad DayanNo ratings yet
- HEXA TP FinancialsDocument60 pagesHEXA TP FinancialsKanmani FX21015100% (1)
- AffairsCloud Monthly Banking CA-February 2022Document118 pagesAffairsCloud Monthly Banking CA-February 2022Anjita SrivastavaNo ratings yet
- IV B.tech I Sem Question Bank 2017-18Document34 pagesIV B.tech I Sem Question Bank 2017-18Arun KumarNo ratings yet
- Eth 13091915 2 150420Document361 pagesEth 13091915 2 150420padeepNo ratings yet
- Essentials of Process Plant PipingDocument59 pagesEssentials of Process Plant PipingES19CH28 MANJU M.LNo ratings yet
- Council Requested Budget Adjustment AdditionsDocument58 pagesCouncil Requested Budget Adjustment AdditionsDarren KrauseNo ratings yet
- SeptDocument254 pagesSeptAbhishek SinghNo ratings yet
- Financial Management Project AnalysisDocument10 pagesFinancial Management Project AnalysisAlisha Shaw0% (1)
- Brushless DC Motor Characterisation and Selection For A Fixed Wing UAVDocument6 pagesBrushless DC Motor Characterisation and Selection For A Fixed Wing UAVbaleci mtlczNo ratings yet
- EEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFDocument7 pagesEEE 1206 011 Direct Quadrate Modeling Induction Motor MatLab Simulink PDFFiaz KhanNo ratings yet
- Development of Electric Vehicle Powertrain: Experimental Implementation and Performance AssessmentDocument7 pagesDevelopment of Electric Vehicle Powertrain: Experimental Implementation and Performance AssessmentBaldau Pratap Singh BundelaNo ratings yet
- Motor Speed Control Using FPGA: July 2014Document5 pagesMotor Speed Control Using FPGA: July 2014Jaime SaenzNo ratings yet
- Artículo Base de DatosDocument6 pagesArtículo Base de DatosJuan Sebas Causil Causil RamirezNo ratings yet
- Active Suspension System Energy Control 2009 IFAC Proceedings VolumesDocument7 pagesActive Suspension System Energy Control 2009 IFAC Proceedings VolumesKeneni AlemayehuNo ratings yet
- Improved Three Phase Single Phase Torque Cancellation IEEEAccess2021Document10 pagesImproved Three Phase Single Phase Torque Cancellation IEEEAccess2021DEBARATI DAMNo ratings yet
- Tabla de Informacion Sobre Motores ElectricosDocument8 pagesTabla de Informacion Sobre Motores ElectricosAgustin BrianeseNo ratings yet
- Ijet V3i5p16Document13 pagesIjet V3i5p16International Journal of Engineering and TechniquesNo ratings yet
- MATLAB/Simulink Based Speed Control Model For Converter Controlled DC DrivesDocument8 pagesMATLAB/Simulink Based Speed Control Model For Converter Controlled DC DrivesEng RSMYNo ratings yet
- Elevator Based BLDCDocument9 pagesElevator Based BLDCsathishNo ratings yet
- A Simple Indirect Field-Oriented Control Scheme For Multiphase Induction Machine, 2005.Document8 pagesA Simple Indirect Field-Oriented Control Scheme For Multiphase Induction Machine, 2005.Ali H. NumanNo ratings yet
- Development of A Dynamic Propulsion Model For Electric UAVsDocument13 pagesDevelopment of A Dynamic Propulsion Model For Electric UAVs정종욱No ratings yet
- Comms ArticleDocument16 pagesComms ArticleKabelo MokgwelepeNo ratings yet
- Direct Quadrate D-Q Modeling of 3-Phase PDFDocument7 pagesDirect Quadrate D-Q Modeling of 3-Phase PDFRuchir Pandey HSET, SRHUNo ratings yet
- LAMDAMAP99030FUDocument9 pagesLAMDAMAP99030FUSujal jadhavNo ratings yet
- Experion Series C Platform Specifications and Technical DataDocument9 pagesExperion Series C Platform Specifications and Technical Datasamim_khNo ratings yet
- Problem 10.7Document3 pagesProblem 10.7台師大陳彥穎No ratings yet
- UNITROL Now - 67 - 13Document24 pagesUNITROL Now - 67 - 13nileshNo ratings yet
- High Impedance Fault Detection Using Multi Domain Feature With Artificial Neural NetworkDocument15 pagesHigh Impedance Fault Detection Using Multi Domain Feature With Artificial Neural NetworkANKAN CHANDRANo ratings yet
- Liberty MPA-4500 Owners ManualDocument8 pagesLiberty MPA-4500 Owners ManualOppie51No ratings yet
- SensorLink - Radio Ampstik Datasheet v01Document2 pagesSensorLink - Radio Ampstik Datasheet v01distribusi masohiNo ratings yet
- Dynamic Stability of SMIB System With Fuzzy Logic Based Power System StabilizerDocument6 pagesDynamic Stability of SMIB System With Fuzzy Logic Based Power System StabilizerInternational Journal of Research in Science & TechnologyNo ratings yet
- On LED &: Seminar ReportDocument31 pagesOn LED &: Seminar Reportbhaveshprajapati123No ratings yet
- IC 4060 Design NoteDocument2 pagesIC 4060 Design Notemano012No ratings yet
- Analog OscilloscopeDocument4 pagesAnalog OscilloscopeA RNo ratings yet
- EEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttDocument16 pagesEEE373 Electric Motor Drive: Asst. Prof. Dr. Mongkol Konghirun Ee, KmuttMohd Mohsin KhanNo ratings yet
- Olivetti D-Color MF220, MF280, MF360 Service Manual PDFDocument849 pagesOlivetti D-Color MF220, MF280, MF360 Service Manual PDFJames HarperNo ratings yet
- Catalogue 2023Document70 pagesCatalogue 2023amirul adikaNo ratings yet
- Photodiode and Solarcell (31.8.20) & (1.9.20)Document33 pagesPhotodiode and Solarcell (31.8.20) & (1.9.20)girishkumardarisi254100% (1)
- MPPT Solar and Wind Power Boost Charge Controller - OpenCircuits PDFDocument6 pagesMPPT Solar and Wind Power Boost Charge Controller - OpenCircuits PDFSumon Dhara100% (1)
- Manual - SB60Document11 pagesManual - SB60Bob EonNo ratings yet
- 3c Al Xlpe PVC 12.7 (22) KV Heavy Duty Cws ArmouredDocument2 pages3c Al Xlpe PVC 12.7 (22) KV Heavy Duty Cws Armouredgari_monsantoNo ratings yet
- Service Manual: Fm/Am Compact Disc PlayerDocument40 pagesService Manual: Fm/Am Compact Disc PlayerClaudio José PintoNo ratings yet
- 2414 IS-ThermalModelCalculations 20210805Document10 pages2414 IS-ThermalModelCalculations 20210805jorge_moralesmNo ratings yet
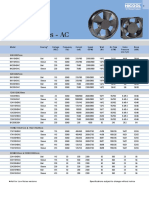
- Compact Fan Ac PDFDocument1 pageCompact Fan Ac PDFKanaga RajNo ratings yet
- MC145151-2 and MC145152-2: PLL Frequency Synthesizers (CMOS)Document24 pagesMC145151-2 and MC145152-2: PLL Frequency Synthesizers (CMOS)Willington Augusto ArizaNo ratings yet
- EDS 01-0045 Overhead Line Ratings PDFDocument12 pagesEDS 01-0045 Overhead Line Ratings PDFDan StreetNo ratings yet
- PD Instrument SDMT - PD13 Rev ADocument2 pagesPD Instrument SDMT - PD13 Rev Albk50No ratings yet
- MA & CONTACT Terminal Installation GuideDocument14 pagesMA & CONTACT Terminal Installation GuideNiki NaidenovNo ratings yet
- Design and Analysis of Phase Locked Loop and Performance ParametersDocument11 pagesDesign and Analysis of Phase Locked Loop and Performance ParametersAnubhav KohliNo ratings yet
- Instruction Manual: MNX SeriesDocument30 pagesInstruction Manual: MNX Seriesalex lzgNo ratings yet
- Inovance Err Trouble Shooting GuideDocument23 pagesInovance Err Trouble Shooting GuideSohag Walle UllahNo ratings yet