You might also like
- Ayurvedam For Hair Related IssuesDocument14 pagesAyurvedam For Hair Related IssuesGangadhar Yerraguntla100% (1)
- Analysis and Design of Ballastless Track SlabDocument8 pagesAnalysis and Design of Ballastless Track SlabSuhas_vroom8546No ratings yet
- PADI Rescue Diver - Blank Knowledge ReviewDocument13 pagesPADI Rescue Diver - Blank Knowledge ReviewAj Quek67% (3)
- Heat Sink Capacity Mesurment in Inservice PipelineDocument13 pagesHeat Sink Capacity Mesurment in Inservice PipelineSomeshNo ratings yet
- 5276Document52 pages5276Sean PorterNo ratings yet
- Tilt Wing Model Design PDFDocument23 pagesTilt Wing Model Design PDFpadmanabhanrameshNo ratings yet
- LATOUR, Bruno - On InterobjectivityDocument19 pagesLATOUR, Bruno - On InterobjectivityjoaofmaNo ratings yet
- Datasheet - 74LS283 - Somador Binário Completo de 4 BitsDocument7 pagesDatasheet - 74LS283 - Somador Binário Completo de 4 BitsLucas CarvalhoNo ratings yet
- Heavy-Lift Multirotor Unmanned Aerial Vehicles Characterization and SizingDocument16 pagesHeavy-Lift Multirotor Unmanned Aerial Vehicles Characterization and SizingYugandhar YugandharNo ratings yet
- Innovative Concept of Unfoldable Wheel With An ActDocument7 pagesInnovative Concept of Unfoldable Wheel With An ActGüner GüvençNo ratings yet
- A Modified Design of Unmanned Aerial & Ground Vehicle (UAGV) : January 2017Document6 pagesA Modified Design of Unmanned Aerial & Ground Vehicle (UAGV) : January 2017Марко РадовановићNo ratings yet
- Design and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020Document7 pagesDesign and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020Ho Van RoiNo ratings yet
- Design and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020Document7 pagesDesign and Fabrication of Battery Operated Forklift: Journal Europã©En Des Systã Mes Automatisã©S January 2020142 Sanjaykumar S RNo ratings yet
- Design and Construction of A Novel Quad Tilt-Wing UAVDocument23 pagesDesign and Construction of A Novel Quad Tilt-Wing UAVKyle NhuNo ratings yet
- Cooperative Control System of The Floating Cranes For The Dual LiftingDocument8 pagesCooperative Control System of The Floating Cranes For The Dual LiftingSebastian Velásquez MoralesNo ratings yet
- Investigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueDocument19 pagesInvestigation On The Design of Double-Stage Scissor Lifts Based On Parametric Dimension TechniqueGogyNo ratings yet
- Design and Trajectory Control of Universal Drone System: Measurement July 2019Document10 pagesDesign and Trajectory Control of Universal Drone System: Measurement July 2019hw606No ratings yet
- Design and Fabrication of HoverbikeDocument11 pagesDesign and Fabrication of HoverbikeInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- IJISRT23JUL645Document11 pagesIJISRT23JUL645International Journal of Innovative Science and Research TechnologyNo ratings yet
- Development of VTOL Drone For Stable Transit FlighDocument8 pagesDevelopment of VTOL Drone For Stable Transit FlighArifDarmawanNo ratings yet
- Design and Fabrication of An Uav: June 2020Document5 pagesDesign and Fabrication of An Uav: June 2020lizhengNo ratings yet
- Composite Monocoque SolarDocument11 pagesComposite Monocoque SolarMuhammad SaalihNo ratings yet
- 1 s2.0 S1270963815002679 MainDocument7 pages1 s2.0 S1270963815002679 MainIslem TlbNo ratings yet
- Design and Control of A Midair Reconfigurable0AQuadcopter Using Unactuated HingesDocument13 pagesDesign and Control of A Midair Reconfigurable0AQuadcopter Using Unactuated Hingessamiadem1099No ratings yet
- Flight Performance of A Package Delivery Quad Rotor BiplaneDocument12 pagesFlight Performance of A Package Delivery Quad Rotor BiplaneBreno Brito MirandaNo ratings yet
- Estimation of The Hydrodynamics Coefficients of AnDocument7 pagesEstimation of The Hydrodynamics Coefficients of AnmohamedNo ratings yet
- Design of Low Altitude Long Endurance Solar-Powered UAV Using Genetic AlgorithmDocument24 pagesDesign of Low Altitude Long Endurance Solar-Powered UAV Using Genetic Algorithm이재국No ratings yet
- Design and Dynamic Analysis of Landing Gear System in Vertical Takeoff and Vertical Landing Reusable Launch VehicleDocument14 pagesDesign and Dynamic Analysis of Landing Gear System in Vertical Takeoff and Vertical Landing Reusable Launch Vehicle使徒No ratings yet
- The Foldable DroneDocument8 pagesThe Foldable DronePau SierraNo ratings yet
- Ijapie Si Idcm 605Document5 pagesIjapie Si Idcm 605OKA FATRANo ratings yet
- IJERTCONV3IS17016Document8 pagesIJERTCONV3IS17016mem.kilic.40No ratings yet
- Double Hybrid Tailsitter Unmanned Aerial Vehicle With Vertical Takeoff and LandingDocument16 pagesDouble Hybrid Tailsitter Unmanned Aerial Vehicle With Vertical Takeoff and Landingujwalroy119No ratings yet
- Study Vine RobotDocument11 pagesStudy Vine RobotGinoux GuillaumeNo ratings yet
- MainDocument11 pagesMainHoàng ThiếtNo ratings yet
- Physics Project 12-Vishal PDFDocument24 pagesPhysics Project 12-Vishal PDFVishal Harish100% (1)
- Design and Construction of A Novel QuadDocument23 pagesDesign and Construction of A Novel QuadAbdul Haseeb ShahNo ratings yet
- ROTORCRAFT AEROMECHANICS 0. Preface PDFDocument4 pagesROTORCRAFT AEROMECHANICS 0. Preface PDFQuang Tuan BuiNo ratings yet
- IJAORLU v7n1p77 enDocument9 pagesIJAORLU v7n1p77 eneugeneNo ratings yet
- Engineering Science and Technology, An International JournalDocument11 pagesEngineering Science and Technology, An International JournalLorenzo AltonagaNo ratings yet
- Yoon 2016Document11 pagesYoon 2016vishal BhoknalNo ratings yet
- Development of A Morphing Ap Using Shape Memory Alloy Actuators: The Aerodynamic Characteristics of A Morphing ApDocument23 pagesDevelopment of A Morphing Ap Using Shape Memory Alloy Actuators: The Aerodynamic Characteristics of A Morphing Apmed turkiNo ratings yet
- Design and Analysis of Solar QuadcopterDocument10 pagesDesign and Analysis of Solar Quadcoptersaumya irugalbandaraNo ratings yet
- Modeling and Simulation of An Octorotor UAV With Manipulator ArmDronesDocument27 pagesModeling and Simulation of An Octorotor UAV With Manipulator ArmDronesUSHANKA PERUNo ratings yet
- Dynamic Simulation Platform Design For Cubesat With Reaction Wheel Control SystemDocument6 pagesDynamic Simulation Platform Design For Cubesat With Reaction Wheel Control SystemJosue Manuel Pareja ContrerasNo ratings yet
- Large-Sized Multirotor Design Accurate Modeling With Aerodynamics and Optimization For Rotor Tilt AngleDocument18 pagesLarge-Sized Multirotor Design Accurate Modeling With Aerodynamics and Optimization For Rotor Tilt Anglevishal BhoknalNo ratings yet
- IJCAET Omni Wing PaperDocument14 pagesIJCAET Omni Wing PaperPrithvi AdhikaryNo ratings yet
- Quadcopter: Design, Construction and Testing: March 2019Document8 pagesQuadcopter: Design, Construction and Testing: March 2019ashokkumarNo ratings yet
- Design and Development of Hexa-Copter For Environmental ResearchDocument9 pagesDesign and Development of Hexa-Copter For Environmental ResearchAkash015No ratings yet
- Design of An Electric HovercraftDocument6 pagesDesign of An Electric HovercraftNahida IslamNo ratings yet
- Diseño de CuadricopteroDocument6 pagesDiseño de Cuadricopterojuan pabloNo ratings yet
- A Review of Morphing AircraftDocument56 pagesA Review of Morphing AircraftFachri Agung NRNo ratings yet
- Graduate Research in Engineering and Technology (GRET) Graduate Research in Engineering and Technology (GRET)Document5 pagesGraduate Research in Engineering and Technology (GRET) Graduate Research in Engineering and Technology (GRET)Pranav NerkarNo ratings yet
- Drones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewDocument22 pagesDrones: Optimization Methods Applied To Motion Planning of Unmanned Aerial Vehicles: A ReviewvanhaimtaNo ratings yet
- A Lifting Wing Fixed On Multirotor Uavs For Long Flight RangesDocument14 pagesA Lifting Wing Fixed On Multirotor Uavs For Long Flight Rangesyounseok choiNo ratings yet
- Design and Development of Hexa-Copter For Environmental ResearchDocument9 pagesDesign and Development of Hexa-Copter For Environmental Researchሰላም ለሀገሬNo ratings yet
- Machines 12 00157 v2Document19 pagesMachines 12 00157 v2jamel-shamsNo ratings yet
- Omni Wheels Robot For Effective Surveillance and Transportation PurposeDocument8 pagesOmni Wheels Robot For Effective Surveillance and Transportation PurposeIJRASETPublicationsNo ratings yet
- MainDocument8 pagesMainShubham KumarNo ratings yet
- 273332-Article Text-639470-1-10-20230420Document8 pages273332-Article Text-639470-1-10-20230420prakash saralayaNo ratings yet
- ISER Paper Submitted ISv6Document16 pagesISER Paper Submitted ISv6Bhuvan EshNo ratings yet
- Design and Analysis of Retractable Structure of NeDocument9 pagesDesign and Analysis of Retractable Structure of NeBasavaraj G LNo ratings yet
- 17 05 HierarchSpaceStructDocument10 pages17 05 HierarchSpaceStructBenjamin JenettNo ratings yet
- 01-07-2021-1625129537-6-Impact - Ijrhal-14. Ijrhal - Design and Analysis of FlexvatorDocument4 pages01-07-2021-1625129537-6-Impact - Ijrhal-14. Ijrhal - Design and Analysis of FlexvatorImpact JournalsNo ratings yet
- Controlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorDocument11 pagesControlling of An Under-Actuated Quadrotor UAV Equipped With A ManipulatorJoe ReninNo ratings yet
- Dual Axis Tilting QuadDocument20 pagesDual Axis Tilting Quadhw606No ratings yet
- CFD Analysis of An Isolated Main Helicopter RotorDocument8 pagesCFD Analysis of An Isolated Main Helicopter RotorSulaimanNo ratings yet
- The Mole ConceptDocument12 pagesThe Mole ConceptVictor OkosunNo ratings yet
- Group 3 Aia ReportDocument26 pagesGroup 3 Aia ReportNAVAS E VNo ratings yet
- Freight ForwardingDocument43 pagesFreight ForwardingEuroline NtombouNo ratings yet
- Indigenous Resources ActivitiesDocument17 pagesIndigenous Resources Activitiesscribbler49971100% (1)
- Embryo AssignmentDocument2 pagesEmbryo AssignmentA.j. MasagcaNo ratings yet
- Product Life Cycle ManagementDocument35 pagesProduct Life Cycle ManagementRahul KumarNo ratings yet
- Unit Operation QBDocument7 pagesUnit Operation QBsmg26thmayNo ratings yet
- ActuatorsDocument24 pagesActuatorsharishcsharmaNo ratings yet
- Training Matrix Competency 4 Organic ConcoctionsDocument3 pagesTraining Matrix Competency 4 Organic ConcoctionsST. ISIDORE THE FARMERNo ratings yet
- Tecnical Data TYPE 139 L12R / L16RDocument1 pageTecnical Data TYPE 139 L12R / L16RLada LabusNo ratings yet
- Un EinsteinDocument22 pagesUn Einsteinapi-26005027No ratings yet
- EmpathyDocument5 pagesEmpathyHijaab KhaanNo ratings yet
- Investigation Gr. 8Document6 pagesInvestigation Gr. 8Marthie van zylNo ratings yet
- BHHHJDocument10 pagesBHHHJAnonymous vLerKYANo ratings yet
- Berkeley To San JoseDocument88 pagesBerkeley To San JoseTimothy HightowerNo ratings yet
- S800 SCL SR - 2CCC413009B0201 PDFDocument16 pagesS800 SCL SR - 2CCC413009B0201 PDFBalan PalaniappanNo ratings yet
- ETP Combined Spec - R0Document60 pagesETP Combined Spec - R0Pravash Chandra Senapaty100% (1)
- Training Schedule April 2021 To March 22 - 0Document18 pagesTraining Schedule April 2021 To March 22 - 0sanrexiNo ratings yet
- Reglas Digitales Mitutoyo Scale Units Linear ScalesDocument31 pagesReglas Digitales Mitutoyo Scale Units Linear ScalesAngelmambrinNo ratings yet
- Ix T7AM-CAN - Beijer ElectronicsDocument1 pageIx T7AM-CAN - Beijer ElectronicsKen VikstromNo ratings yet
- Extravagant - Bethel Music CHORDS PDFDocument2 pagesExtravagant - Bethel Music CHORDS PDFKamila Joseph Hernandez VanegasNo ratings yet
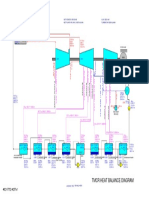
- 01 TMCR Heat Balance DiagramDocument1 page01 TMCR Heat Balance DiagramPrescila PalacioNo ratings yet
- Biogas Processes and Sustainable DevelopmentDocument199 pagesBiogas Processes and Sustainable DevelopmentH.J.PrabhuNo ratings yet