You might also like
- Hydraulics Excavator PDFDocument16 pagesHydraulics Excavator PDFChandaKunda100% (1)
- Microsoft Excel-Based Tool Kit for Planning Hybrid Energy Systems: A User GuideFrom EverandMicrosoft Excel-Based Tool Kit for Planning Hybrid Energy Systems: A User GuideNo ratings yet
- 345B L Excavator Electrical System (SENR1937-01)Document2 pages345B L Excavator Electrical System (SENR1937-01)sughieantoNo ratings yet
- Regenerative For Electric VehiclesDocument7 pagesRegenerative For Electric VehiclesSasidhar JannuNo ratings yet
- Pressure Test of Oil CoolerDocument2 pagesPressure Test of Oil CoolersughieantoNo ratings yet
- Honing Procedures For LinerDocument6 pagesHoning Procedures For LinersughieantoNo ratings yet
- HR SummitDocument7 pagesHR SummitAndreeaMare1984No ratings yet
- Ai-900 - 91Q - June - 2021 - by - Drunkmonk: Passing Score: 800 Time Limit: 120 Min File Version: 1.0Document66 pagesAi-900 - 91Q - June - 2021 - by - Drunkmonk: Passing Score: 800 Time Limit: 120 Min File Version: 1.0Srinivas AddepalliNo ratings yet
- ESP Pump Selection, Evaluation Improve Well Inflow, Volumes - Oil & Gas JournalDocument7 pagesESP Pump Selection, Evaluation Improve Well Inflow, Volumes - Oil & Gas JournaljoreliNo ratings yet
- Company Certificate: Aditya Birla Group LimitedDocument6 pagesCompany Certificate: Aditya Birla Group Limitedcity9848835243 cyberNo ratings yet
- Altium Designer PADS Migration GuideDocument48 pagesAltium Designer PADS Migration GuideFused ElectronicsNo ratings yet
- Innovation Landscape brief: Electric-vehicle smart chargingFrom EverandInnovation Landscape brief: Electric-vehicle smart chargingNo ratings yet
- Introduction to Hybrid Vehicle System Modeling and ControlFrom EverandIntroduction to Hybrid Vehicle System Modeling and ControlRating: 4 out of 5 stars4/5 (1)
- A Report On Regenerative Braking in TractionDocument29 pagesA Report On Regenerative Braking in Tractionshubham dhage100% (1)
- CVT2010 - Mech Hybrid Paper PDFDocument7 pagesCVT2010 - Mech Hybrid Paper PDFSurendra SainiNo ratings yet
- A Comprehensive Overview of Hybrid ConstructionDocument15 pagesA Comprehensive Overview of Hybrid ConstructionShativel ViswanathanNo ratings yet
- Agriculture 12 00436 v2Document22 pagesAgriculture 12 00436 v2Adrian MarinNo ratings yet
- VSD From Avec HHVDocument16 pagesVSD From Avec HHVmarkomasNo ratings yet
- ExcavatorEnergy savingEfficiencyBasedonDieselEngineDocument9 pagesExcavatorEnergy savingEfficiencyBasedonDieselEngineyusufNo ratings yet
- Energy Harvesting From A Vehicle Suspension System PDFDocument9 pagesEnergy Harvesting From A Vehicle Suspension System PDFChela RodriguezNo ratings yet
- Comparison of Four-Wheel-Drive Hybrid Powertrain ConfigurationsDocument13 pagesComparison of Four-Wheel-Drive Hybrid Powertrain ConfigurationsCostin DanielNo ratings yet
- 70-On The Dynamic Behavior of Series Hydraulic Hybrid VehicleDocument16 pages70-On The Dynamic Behavior of Series Hydraulic Hybrid VehicleGalal RabieNo ratings yet
- Development of A Hydro-Mechanical Hydraulic Hybrid Drive Train With Independent Wheel Torque Control For An Urban Passenger VehicleDocument11 pagesDevelopment of A Hydro-Mechanical Hydraulic Hybrid Drive Train With Independent Wheel Torque Control For An Urban Passenger Vehicleمحمد جوادNo ratings yet
- Control Strategy of A Fuel-Cell Power Module For Electric ForkliftDocument11 pagesControl Strategy of A Fuel-Cell Power Module For Electric Forkliftcan kaplanNo ratings yet
- Sname JSR 2020 64 2 171 PDFDocument14 pagesSname JSR 2020 64 2 171 PDFGabriel EduardoNo ratings yet
- Paper 3Document23 pagesPaper 3Swati NikamNo ratings yet
- 2020 Ditrolio ''A Hybrid Power-Unit Based On A Passive Fuel Cellbattery System For Light Weight Vehicles''Document11 pages2020 Ditrolio ''A Hybrid Power-Unit Based On A Passive Fuel Cellbattery System For Light Weight Vehicles''Abdul RehmanNo ratings yet
- Banerjee 2018Document14 pagesBanerjee 2018Prasad JoshiNo ratings yet
- Design and Analysis of Regenerative Braking System of All-Terrain VehicleDocument5 pagesDesign and Analysis of Regenerative Braking System of All-Terrain VehicleAmit TogreNo ratings yet
- A Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop TestsDocument13 pagesA Novel Regenerative Electrohydraulic Brake System: Development and Hardware-in-Loop TestsNouman AhmadNo ratings yet
- Journal of Power Sources: Emiliano Pipitone, Gianpaolo VitaleDocument10 pagesJournal of Power Sources: Emiliano Pipitone, Gianpaolo VitaleBT20MEC120 Jyoti ThakurNo ratings yet
- Kinetic Energy Recovery Systems in Motor VehiclesDocument12 pagesKinetic Energy Recovery Systems in Motor Vehiclessahaj sorathiyaNo ratings yet
- Comparative Energy Analysis of A Load Sensing SystDocument19 pagesComparative Energy Analysis of A Load Sensing SystMDLNo ratings yet
- Energies: Optimization and Application For Hydraulic Electric Hybrid VehicleDocument17 pagesEnergies: Optimization and Application For Hydraulic Electric Hybrid VehicleSs KalagiNo ratings yet
- Efficiency Enhancement of A New Two-Motor Hybrid SystemDocument11 pagesEfficiency Enhancement of A New Two-Motor Hybrid SystemAnchal SaxenaNo ratings yet
- Applied Sciences: Design and Test of Load-Lifting Performance For Hydraulic Linkage of The High-Medium Horsepower TractorDocument13 pagesApplied Sciences: Design and Test of Load-Lifting Performance For Hydraulic Linkage of The High-Medium Horsepower TractorOuma'iima RebeyNo ratings yet
- Introduction To Hybrid Drive TrainsDocument16 pagesIntroduction To Hybrid Drive TrainsAkhilesh RavichandranNo ratings yet
- A Study of Novel Regenerative Braking System Based On Supercapacitor For Electric Vehicle Driven by In-Wheel MotorsDocument12 pagesA Study of Novel Regenerative Braking System Based On Supercapacitor For Electric Vehicle Driven by In-Wheel MotorsDONE AND DUSTEDNo ratings yet
- Saepaper Lacerte 2014-12-12Document12 pagesSaepaper Lacerte 2014-12-12Thiên ThanhNo ratings yet
- Regenerative Braking System: Group GuideDocument14 pagesRegenerative Braking System: Group GuidePooja BanNo ratings yet
- Optimal Torque Split Strategy of Dual-Motor ElectrDocument21 pagesOptimal Torque Split Strategy of Dual-Motor Electrquang caoNo ratings yet
- Hitachi ReviewDocument5 pagesHitachi Reviewbobcat3304No ratings yet
- Ksam 38 171Document9 pagesKsam 38 171Richard De Medeiros CastroNo ratings yet
- Hybrid Electric Vehicles and Regenerative BrakingDocument7 pagesHybrid Electric Vehicles and Regenerative BrakinggadrumNo ratings yet
- Regenerative Braking StategyDocument10 pagesRegenerative Braking StategyAshwin SelvakumarNo ratings yet
- Ac 2007-429: An Innovative Hybrid-Electric Drivetrain Concept and Student ProjectDocument13 pagesAc 2007-429: An Innovative Hybrid-Electric Drivetrain Concept and Student ProjectAbdul HakeemNo ratings yet
- Energies 15 07243 v3Document26 pagesEnergies 15 07243 v3Tran DanteNo ratings yet
- 2010 01 1757 PDFDocument12 pages2010 01 1757 PDFSteven SullivanNo ratings yet
- Guest Editorial Special Section On Vehicle Power and PropulsionsDocument3 pagesGuest Editorial Special Section On Vehicle Power and PropulsionsvishiwizardNo ratings yet
- Development of An Optimal Power-Distribution-Management Algorithm For Four-Wheel-Drive Electric VehiclesDocument11 pagesDevelopment of An Optimal Power-Distribution-Management Algorithm For Four-Wheel-Drive Electric VehiclessammyNo ratings yet
- Design and Optimization of A Drivetrain With Two-Speed Transmission For Electric Delivery Step VanDocument8 pagesDesign and Optimization of A Drivetrain With Two-Speed Transmission For Electric Delivery Step VanPrafulla DandgeNo ratings yet
- Modelling and Analysis of Plug-In Series-Parallel Hybrid Medium-Duty VehiclesDocument10 pagesModelling and Analysis of Plug-In Series-Parallel Hybrid Medium-Duty VehiclesEduardo Garcia VázquezNo ratings yet
- Indian Railways and Hybrid Electric Vehicle: September 2015Document10 pagesIndian Railways and Hybrid Electric Vehicle: September 2015Karthik spNo ratings yet
- Hierarchical Control of Vehicular Fuel Cell and Battery Hybrid PowertrainDocument10 pagesHierarchical Control of Vehicular Fuel Cell and Battery Hybrid Powertrainbnd1uNo ratings yet
- Autonomous Hybrid Tractor Unit With A Predictive Control SystemDocument8 pagesAutonomous Hybrid Tractor Unit With A Predictive Control SystemTJPRC PublicationsNo ratings yet
- Energies: Energy Consumption of A Battery Electric Vehicle With Infinitely Variable TransmissionDocument21 pagesEnergies: Energy Consumption of A Battery Electric Vehicle With Infinitely Variable TransmissionGautham NNo ratings yet
- Parallel HEV Hybrid Controller Modeling For Power ManagementDocument7 pagesParallel HEV Hybrid Controller Modeling For Power ManagementIago HenriqueNo ratings yet
- Artículo 1 PDFDocument9 pagesArtículo 1 PDFERNESTO RAFAEL BAZAN PADILLANo ratings yet
- Development of An Efficient Hybrid TricycleDocument7 pagesDevelopment of An Efficient Hybrid TricycleHari A Ram PrasadNo ratings yet
- Regenerative Braking Strategy For Motor Hoist by UltracapacitorDocument9 pagesRegenerative Braking Strategy For Motor Hoist by Ultracapacitorhai dangNo ratings yet
- Engineering Perspective: Modeling The Vehicle Movement and Braking Effect of The Hydrostatic Regenerative Braking SystemDocument9 pagesEngineering Perspective: Modeling The Vehicle Movement and Braking Effect of The Hydrostatic Regenerative Braking SystemMustafa KaramanNo ratings yet
- Optimal Design of A Hybrid Hydromechanical Transmission For A Reach StackerDocument11 pagesOptimal Design of A Hybrid Hydromechanical Transmission For A Reach StackerSebastian AlmagroNo ratings yet
- Mechanism and Machine Theory: Hanqi Yue, Chenyi Zhu, Bingzhao GaoDocument13 pagesMechanism and Machine Theory: Hanqi Yue, Chenyi Zhu, Bingzhao GaoAnthonyRivasNo ratings yet
- Improvement of Boom Control Performance For Hybrid Hydra 2013 Automation inDocument9 pagesImprovement of Boom Control Performance For Hybrid Hydra 2013 Automation inJoseph JoseNo ratings yet
- Mini Project ReportDocument24 pagesMini Project ReportbharathahsNo ratings yet
- A Control Method To Suppress The Swing Vibration of A Hybrid Excavator Using Sliding Mode ApproachDocument17 pagesA Control Method To Suppress The Swing Vibration of A Hybrid Excavator Using Sliding Mode ApproachJackson PhinniNo ratings yet
- Design and Development of Hydro-Mechanical Bicycle (2020-2021)Document34 pagesDesign and Development of Hydro-Mechanical Bicycle (2020-2021)Tarun GuptaNo ratings yet
- Diesel Electric Locomotive ComponentsDocument10 pagesDiesel Electric Locomotive Componentssimbairvine23No ratings yet
- Guidelines For Reusable Parts and Salvage Operations of Camshafts Visual Inspection of Timing GearDocument6 pagesGuidelines For Reusable Parts and Salvage Operations of Camshafts Visual Inspection of Timing GearsughieantoNo ratings yet
- Guidelines For Reusable Parts and Salvage Operations of Turbine Housings Visual Inspection of Divided Turbine HousingsDocument4 pagesGuidelines For Reusable Parts and Salvage Operations of Turbine Housings Visual Inspection of Divided Turbine HousingssughieantoNo ratings yet
- Guidelines For Reusable Parts and Salvage Operations of Turbochargers Visual Inspection of Divided TurbochargersDocument17 pagesGuidelines For Reusable Parts and Salvage Operations of Turbochargers Visual Inspection of Divided TurbochargerssughieantoNo ratings yet
- Test Specification Data: Test Spec Number: Engine Serial Number: JDM00225 Engine Model: Combustion: AspirationDocument3 pagesTest Specification Data: Test Spec Number: Engine Serial Number: JDM00225 Engine Model: Combustion: AspirationsughieantoNo ratings yet
- Relax: Marine CatalogueDocument12 pagesRelax: Marine CataloguesughieantoNo ratings yet
- Camshaft Test SheetDocument4 pagesCamshaft Test SheetsughieantoNo ratings yet
- Guidelines For Reusable Parts and Salvage Operations of Lifters Visual Inspection of LiftersDocument6 pagesGuidelines For Reusable Parts and Salvage Operations of Lifters Visual Inspection of LifterssughieantoNo ratings yet
- Engine Oil CapacitiesDocument2 pagesEngine Oil CapacitiessughieantoNo ratings yet
- Visual Inspection Disassemble Area: Engine Oil Cooler / Heat Exchanger Test SheetDocument1 pageVisual Inspection Disassemble Area: Engine Oil Cooler / Heat Exchanger Test SheetsughieantoNo ratings yet
- Marine Audio Cat UpdateDocument6 pagesMarine Audio Cat UpdatesughieantoNo ratings yet
- Index: Dimensions (MM) : Dimensions (MM)Document11 pagesIndex: Dimensions (MM) : Dimensions (MM)sughieantoNo ratings yet
- Relax: VDO - Superior Car AudioDocument8 pagesRelax: VDO - Superior Car AudiosughieantoNo ratings yet
- Technical Specifications: Hydraulic ExcavatorDocument35 pagesTechnical Specifications: Hydraulic ExcavatorsughieantoNo ratings yet
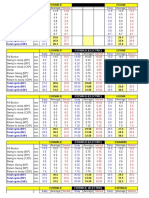
- Total Cycle (60) Total Cycle (90) Total Cycle (120) : Ex1900Ld (Electric)Document2 pagesTotal Cycle (60) Total Cycle (90) Total Cycle (120) : Ex1900Ld (Electric)sughieantoNo ratings yet
- Solid State Magnetic Controller For Material Handlers Electrical System, 283-1452-00 (RENR3125-08)Document2 pagesSolid State Magnetic Controller For Material Handlers Electrical System, 283-1452-00 (RENR3125-08)sughieanto100% (1)
- Conversion Kit For Komatsu PC2000-8 Hydraulic Excavator: Simulation Delivering Safety & ProductivityDocument4 pagesConversion Kit For Komatsu PC2000-8 Hydraulic Excavator: Simulation Delivering Safety & ProductivitysughieantoNo ratings yet
- Trouble Information: Register No. Report Date Fir No. SubjectDocument5 pagesTrouble Information: Register No. Report Date Fir No. SubjectsughieantoNo ratings yet
- Fryday Bucharest PresentationDocument11 pagesFryday Bucharest PresentationCsaba DemeterNo ratings yet
- Map Print ModuleDocument24 pagesMap Print ModuleLoha Manoj SivakumarNo ratings yet
- Law School Homework AssignmentsDocument6 pagesLaw School Homework Assignmentsere4cecm100% (1)
- Deep Learning Models For The Prediction of RainfallDocument5 pagesDeep Learning Models For The Prediction of RainfallIanmochaNo ratings yet
- Fiber Doctor System Introduction ISSUE 1.30 - NCEDocument55 pagesFiber Doctor System Introduction ISSUE 1.30 - NCErafael antonio padilla mayorgaNo ratings yet
- How Dominos Should Best To Expand Into New International MarketsDocument1 pageHow Dominos Should Best To Expand Into New International MarketsAmiya Kumar SinghNo ratings yet
- RBI PBPP Business Research Dec 2012 (F)Document78 pagesRBI PBPP Business Research Dec 2012 (F)AmbreenNo ratings yet
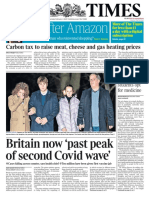
- The Times 40 2021-02!04!41 - Unlocked UserUpload NetDocument68 pagesThe Times 40 2021-02!04!41 - Unlocked UserUpload NetВадик БондаренкоNo ratings yet
- 1115Document26 pages1115vf3nixNo ratings yet
- Family Business Goals Tourism Hospitality Sector Case Studies - OriginalDocument18 pagesFamily Business Goals Tourism Hospitality Sector Case Studies - Originalsnob_kNo ratings yet
- Promise To Marry FINALDocument7 pagesPromise To Marry FINALSAMUKA HERMANNo ratings yet
- Msi b250 Gaming m3 Ms-7a62 Rev1.0Document67 pagesMsi b250 Gaming m3 Ms-7a62 Rev1.0Julio BelloNo ratings yet
- Corporate Social Responsibility of ABS CBN CorporationDocument17 pagesCorporate Social Responsibility of ABS CBN CorporationGel Sanchez33% (3)
- Expand My Business Ceo Founder Cto Apollo 2 - 7 Feb 2024Document191 pagesExpand My Business Ceo Founder Cto Apollo 2 - 7 Feb 2024arpit.mNo ratings yet
- Service Support Catalog 2020Document178 pagesService Support Catalog 2020Xin GaoNo ratings yet
- KALAnnualReport2016 17Document92 pagesKALAnnualReport2016 17MOORTHY.KENo ratings yet
- The Evolution of MoneyDocument7 pagesThe Evolution of MoneyHà Nhi LêNo ratings yet
- A Steganography Method Based On Hiding Secrete Data in MPEG/Audio Layer IIIDocument6 pagesA Steganography Method Based On Hiding Secrete Data in MPEG/Audio Layer IIIjuni29thNo ratings yet
- LAOKEN Comparison With J&JDocument3 pagesLAOKEN Comparison With J&JMario Alfonso MartinezNo ratings yet
- Oversized Circular Corrugated Waveguides Operated at 42 GHZ For Ecrh ApplicationDocument10 pagesOversized Circular Corrugated Waveguides Operated at 42 GHZ For Ecrh Applicationjit_72No ratings yet
- Jimma - 1Document2 pagesJimma - 1Simret TesfayeNo ratings yet
- Unilever Sustainable Living Plan India 2011 Progress Report Tcm114 241468Document16 pagesUnilever Sustainable Living Plan India 2011 Progress Report Tcm114 241468Jagwant SinghNo ratings yet
- 1 s2.0 S1991790221001045 MainDocument10 pages1 s2.0 S1991790221001045 MainAazariNo ratings yet
- Excel Su DokuDocument18 pagesExcel Su DokuHimanshu SharmaNo ratings yet
- Engine Lubricating Oil System (LO System)Document8 pagesEngine Lubricating Oil System (LO System)JoeScottNo ratings yet