You might also like
- Solutions To Sample Exam QuestionsDocument10 pagesSolutions To Sample Exam Questionsrapt100% (2)
- The Multibody Systems Approach to Vehicle DynamicsFrom EverandThe Multibody Systems Approach to Vehicle DynamicsRating: 5 out of 5 stars5/5 (2)
- Groups Notes by TrockersDocument17 pagesGroups Notes by Trockerstapiwa nzvatu100% (1)
- An Operational Application of System Dynamics in The Automotive Industry: Inventory Management at BMWDocument10 pagesAn Operational Application of System Dynamics in The Automotive Industry: Inventory Management at BMWGourav DebNo ratings yet
- Mixed Model Assembly Line BalancingDocument29 pagesMixed Model Assembly Line BalancingSayan Chakraborty82% (11)
- Process OptimizationDocument17 pagesProcess OptimizationshyamkohliNo ratings yet
- Field Programmable Gate Array Technology by Trimberger Stephen M 8181286030 PDFDocument5 pagesField Programmable Gate Array Technology by Trimberger Stephen M 8181286030 PDFRangacharya kondapakaNo ratings yet
- Microsoft Storage Spaces Direct (S2D) Deployment Guide: Front CoverDocument36 pagesMicrosoft Storage Spaces Direct (S2D) Deployment Guide: Front CoverСергей КовалевNo ratings yet
- Significance of Virtual Prototyping in Design of Composite Structures For AutomobilesDocument6 pagesSignificance of Virtual Prototyping in Design of Composite Structures For Automobilesashutosh.srvNo ratings yet
- Topology Optimization Using Additive Manufacturing ConstraintsDocument22 pagesTopology Optimization Using Additive Manufacturing ConstraintsManoj NehraNo ratings yet
- Capability Building in China's Auto Supply Chains: Loren Brandt & Johannes Van Biesebroeck University of TorontoDocument40 pagesCapability Building in China's Auto Supply Chains: Loren Brandt & Johannes Van Biesebroeck University of TorontoGary MaoNo ratings yet
- AnalisBasedSimulation PDFDocument5 pagesAnalisBasedSimulation PDFRieska foni YuniarNo ratings yet
- Integrated Production Planning Scheme For Car Manufacturing OperationsDocument8 pagesIntegrated Production Planning Scheme For Car Manufacturing OperationsMuthumanikandan HariramanNo ratings yet
- Automotive E-Coat Paint Process Simulation Using FEADocument20 pagesAutomotive E-Coat Paint Process Simulation Using FEAflowh_100% (1)
- Dynamic Sequencing of Jobs On Conveyor Systems For Minimizing ChangeoversDocument9 pagesDynamic Sequencing of Jobs On Conveyor Systems For Minimizing Changeoversserizawa91No ratings yet
- Optimization To Body in White DesignDocument14 pagesOptimization To Body in White Designharshal161987No ratings yet
- Expert Systems With Applications: Said Aqil, Karam AllaliDocument17 pagesExpert Systems With Applications: Said Aqil, Karam AllaliRumah WayangNo ratings yet
- Sciencedirect: Influence of Tolerancing Methods and Aspects of Perceived Quality On Side Closures of Luxury CarsDocument6 pagesSciencedirect: Influence of Tolerancing Methods and Aspects of Perceived Quality On Side Closures of Luxury CarsBabu PonnuswamyNo ratings yet
- Crash Crash Worthiness Auc03 BMWDocument18 pagesCrash Crash Worthiness Auc03 BMWNareen K ReddyNo ratings yet
- PD VW Success StoryDocument4 pagesPD VW Success StoryAltairKoreaNo ratings yet
- Computer-Aided Casting Design and Simulation PDFDocument9 pagesComputer-Aided Casting Design and Simulation PDFmonish KrishnaNo ratings yet
- Mixed Model Assembly Line Design in A Make-To-Order EnvironmentDocument17 pagesMixed Model Assembly Line Design in A Make-To-Order Environmentasmaa5m3No ratings yet
- Micha Los 2015Document19 pagesMicha Los 2015Avinash KumarNo ratings yet
- BIW Structure Development in Accordance With PassiDocument10 pagesBIW Structure Development in Accordance With PassideepuNo ratings yet
- Point MobilityDocument10 pagesPoint MobilityPadma JaNo ratings yet
- Product Development Time and Cost Reduction Through CAE Process Automation - TVSDocument6 pagesProduct Development Time and Cost Reduction Through CAE Process Automation - TVStrev3rNo ratings yet
- Virtual Cellular Manufacturing Configuring Routing FlexibilityDocument13 pagesVirtual Cellular Manufacturing Configuring Routing FlexibilityDrMohamed MansourNo ratings yet
- A Methodology For The Aesthetic Design of A City-CDocument3 pagesA Methodology For The Aesthetic Design of A City-CSina AryanNo ratings yet
- Model For Assembly Line Re-Balancing Considering Additional Capacity and Outsourcing To Face Demand FluctuationsDocument11 pagesModel For Assembly Line Re-Balancing Considering Additional Capacity and Outsourcing To Face Demand FluctuationsCamila Cortez Del CarpioNo ratings yet
- Optimization Metal Forming18 BDocument20 pagesOptimization Metal Forming18 B广岩 魏No ratings yet
- Assignment No - 1: Department of Mechanical Engineering, J.S.S.A.T.E, BangaloreDocument9 pagesAssignment No - 1: Department of Mechanical Engineering, J.S.S.A.T.E, BangalorejtsrinivasdownNo ratings yet
- 18me4105 - Additive Manufacturing Key & Scheme of Evaluation Dec-2022Document13 pages18me4105 - Additive Manufacturing Key & Scheme of Evaluation Dec-2022srinivas kanakalaNo ratings yet
- Talking Heads Tesla Unboxed Final PDF 5272146Document4 pagesTalking Heads Tesla Unboxed Final PDF 5272146li.shen.learningNo ratings yet
- Acceleration of Car Crash SimulationsDocument2 pagesAcceleration of Car Crash SimulationsMohamed AmineNo ratings yet
- Khlil 2020 IOP Conf. Ser. Mater. Sci. Eng. 745 012068Document8 pagesKhlil 2020 IOP Conf. Ser. Mater. Sci. Eng. 745 012068Juliana Ricato Musso SilvaNo ratings yet
- Multi-Disciplinary Design Optimization of A Composite Car Door For Structural Performance, NVH, Crash Worthiness, Durability and ManufacturabilityDocument59 pagesMulti-Disciplinary Design Optimization of A Composite Car Door For Structural Performance, NVH, Crash Worthiness, Durability and Manufacturabilitymarc271986100% (1)
- Blend StudyDocument35 pagesBlend StudyJavier GutierrezNo ratings yet
- License Plate Detection Using AdaboostDocument6 pagesLicense Plate Detection Using AdaboostpvnvoraNo ratings yet
- Case Studies For Learning Automated System IntegrationDocument8 pagesCase Studies For Learning Automated System IntegrationPradeep PatelNo ratings yet
- BIW Design ProcessDocument9 pagesBIW Design Processprasungovindan100% (1)
- Me - Emu.edu - TR Majid IENG447 IE 447 PDF FILES CIM Lecture Notes 6Document27 pagesMe - Emu.edu - TR Majid IENG447 IE 447 PDF FILES CIM Lecture Notes 6Rohit KundliyaNo ratings yet
- شبیه سازی 3Document6 pagesشبیه سازی 3muhammadaliNo ratings yet
- Components and Generative ProgrammingDocument18 pagesComponents and Generative ProgrammingSavi AnalizeNo ratings yet
- Line Balancing & Capacity Planning Decision: Submitted By: Rohit Raina 0613-MBA-2013Document16 pagesLine Balancing & Capacity Planning Decision: Submitted By: Rohit Raina 0613-MBA-2013ferdyanta_sitepuNo ratings yet
- Mud Deposition Simulation at The CRFM of An AutomoDocument9 pagesMud Deposition Simulation at The CRFM of An AutomoGregorSmithNo ratings yet
- Increasing Demand For Composite Driveshafts Leads To Automated Production - CompositesWorldDocument7 pagesIncreasing Demand For Composite Driveshafts Leads To Automated Production - CompositesWorldAnonymous r3MoX2ZMTNo ratings yet
- Simulation Based Optimization On Mattress Manufacturing LineDocument9 pagesSimulation Based Optimization On Mattress Manufacturing LineArslan AbbasNo ratings yet
- Applying Discrete-Event Simulation and Value Stream Mapping To Reduce Waste in An Automotive Engine Manufacturing PlantDocument12 pagesApplying Discrete-Event Simulation and Value Stream Mapping To Reduce Waste in An Automotive Engine Manufacturing Plantovertime clothingNo ratings yet
- Balancing The Production Line by The Simulation and Statistics Techniques: A Case StudyDocument10 pagesBalancing The Production Line by The Simulation and Statistics Techniques: A Case StudyDonald Robert ManikNo ratings yet
- Design of An FDM Positioning System and Application of An Error-Cost Multiobjective Optimization ApproachDocument9 pagesDesign of An FDM Positioning System and Application of An Error-Cost Multiobjective Optimization ApproachJohovani SuarezNo ratings yet
- Yayin 2Document6 pagesYayin 2Tricia RodriguezNo ratings yet
- Enhanced Knowledge-Based 3D-CAD Methods Supporting Automotive Body-In-White Production EngineeringDocument7 pagesEnhanced Knowledge-Based 3D-CAD Methods Supporting Automotive Body-In-White Production EngineeringBaider AlkhalidiNo ratings yet
- Vitual PistonDocument31 pagesVitual PistonrenatoeliegeNo ratings yet
- A CFD Study of Pickup Truck AerodynamicsDocument9 pagesA CFD Study of Pickup Truck Aerodynamicssh1999No ratings yet
- Cap 1 MMMMDocument3 pagesCap 1 MMMMJaume GarrigaNo ratings yet
- Automatic Robotic Spray Painting of Low Volume HigDocument7 pagesAutomatic Robotic Spray Painting of Low Volume Higadaptive4u4527No ratings yet
- Multi Objective Optimization of A Vehicle Body by Combining Gradient Based Methods and Vehicle Concept ModellingDocument8 pagesMulti Objective Optimization of A Vehicle Body by Combining Gradient Based Methods and Vehicle Concept Modellingreek_bhatNo ratings yet
- 3 VI June 2015Document11 pages3 VI June 2015sitam_nitj4202No ratings yet
- Mesfin GijoDocument9 pagesMesfin GijomesfinNo ratings yet
- Automotive Buzz, Squeak and Rattle: Mechanisms, Analysis, Evaluation and PreventionFrom EverandAutomotive Buzz, Squeak and Rattle: Mechanisms, Analysis, Evaluation and PreventionRating: 5 out of 5 stars5/5 (3)
- Computer Vision Graph Cuts: Exploring Graph Cuts in Computer VisionFrom EverandComputer Vision Graph Cuts: Exploring Graph Cuts in Computer VisionNo ratings yet
- Automated X-Ray Inspection Robot: Enhancing Quality Control Through Computer VisionFrom EverandAutomated X-Ray Inspection Robot: Enhancing Quality Control Through Computer VisionNo ratings yet
- Conceptual Model of Performance Measurement For Power Plant Projects - Ali Naseri GiglooDocument10 pagesConceptual Model of Performance Measurement For Power Plant Projects - Ali Naseri GiglooMostafa HosnyNo ratings yet
- Data Mining Tutorial: Session 2: Stack Overflow Data SetDocument20 pagesData Mining Tutorial: Session 2: Stack Overflow Data SetManigandan SundaramNo ratings yet
- Whitmore EZ-Switch LubricantDocument1 pageWhitmore EZ-Switch LubricantDon HowardNo ratings yet
- IT Strategy + Case Analysis Module Introduction: Professor Tony GerthDocument10 pagesIT Strategy + Case Analysis Module Introduction: Professor Tony GerthVarun DagaNo ratings yet
- Tech Note 377 - Configure FSGateway For OPC Client To Suitelink ServerDocument8 pagesTech Note 377 - Configure FSGateway For OPC Client To Suitelink Serverprofilemail8No ratings yet
- Unique AppSites Data MiningDocument159 pagesUnique AppSites Data Miningintkhab khanNo ratings yet
- Sleuth Case302.mp4Document1 pageSleuth Case302.mp4Andrea ToroNo ratings yet
- Exhibition Research Assistant JDDocument4 pagesExhibition Research Assistant JDYunjing HuangNo ratings yet
- Iec TS 61000-5-8-2009Document32 pagesIec TS 61000-5-8-2009Venkataramanan SNo ratings yet
- Brochure MarineDocument16 pagesBrochure MarineKriz Hor Jiunn ShyangNo ratings yet
- Quotation - Biogas Plant 20 TonDocument3 pagesQuotation - Biogas Plant 20 TonAnkit Agrawal0% (1)
- B185 (1SB18450E5) T150 Sniper MX 150 I MovistarDocument62 pagesB185 (1SB18450E5) T150 Sniper MX 150 I MovistarJonard SayodNo ratings yet
- Carrier VRF Catalogue Superplus NewDocument40 pagesCarrier VRF Catalogue Superplus NewGursimran AroraNo ratings yet
- CSE-3002 Programming in Java: Problem StatementDocument9 pagesCSE-3002 Programming in Java: Problem StatementAbhyuday ChauhanNo ratings yet
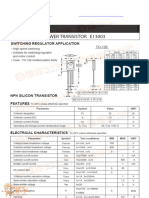
- Power Transistor E13003: Switching Regulator ApplicationDocument2 pagesPower Transistor E13003: Switching Regulator Applicationblancodaniel00000No ratings yet
- OpenGL Class NotesDocument10 pagesOpenGL Class NotesWilliam SmithNo ratings yet
- Product Specifications: HBXX-9014DS-VTMDocument3 pagesProduct Specifications: HBXX-9014DS-VTMАнтонNo ratings yet
- PET100 - Advanced GPS Tracker For PetsDocument7 pagesPET100 - Advanced GPS Tracker For PetsAndres GonzalezNo ratings yet
- X-Band Solid-State Surface Movement Radar "ALCOR": PJSC "Almaz R&P Corp." Almaz-Antey ConcernDocument2 pagesX-Band Solid-State Surface Movement Radar "ALCOR": PJSC "Almaz R&P Corp." Almaz-Antey ConcernNapssNo ratings yet
- Chat GPTDocument2 pagesChat GPTMaureen MainaNo ratings yet
- OOSD Design Case StudiesDocument10 pagesOOSD Design Case StudiesmarioNo ratings yet
- Short Circuit Page PG PDFDocument6 pagesShort Circuit Page PG PDFcarlik09No ratings yet
- Study of Mechanical Properties of Fiber Reinforced Concrete With Conventional ConcreteDocument2 pagesStudy of Mechanical Properties of Fiber Reinforced Concrete With Conventional ConcreteSandesh LamsalNo ratings yet
- 2D TransformationDocument7 pages2D TransformationSonali SinghNo ratings yet
- Manual Impedancia RJLDocument20 pagesManual Impedancia RJLMonicaNo ratings yet
- GP200AAH: Type Nominal Dimension (With Sleeve) Applications Nominal Voltage CapacityDocument1 pageGP200AAH: Type Nominal Dimension (With Sleeve) Applications Nominal Voltage CapacitysatefutNo ratings yet
- Odyssey 2 SampleDocument19 pagesOdyssey 2 Sampleantonina.1989No ratings yet