You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- NREL CostingDocument23 pagesNREL CostingKyle RubricoNo ratings yet
- OSH Issues in Insatallation and Maintenance of Floating SolarDocument19 pagesOSH Issues in Insatallation and Maintenance of Floating SolarKyle RubricoNo ratings yet
- Mooring Design and CalculationsDocument10 pagesMooring Design and CalculationsKyle RubricoNo ratings yet
- Technoeconomic Analysis of Floating Solar Field For 1 GWH of Electricity GenerationDocument18 pagesTechnoeconomic Analysis of Floating Solar Field For 1 GWH of Electricity GenerationKyle RubricoNo ratings yet
- Abb Fimer 1mw 1000kw Pvs 980 Central Inverter Solar String InverterDocument2 pagesAbb Fimer 1mw 1000kw Pvs 980 Central Inverter Solar String InverterKyle RubricoNo ratings yet
- Mismatch Power Loss in PV ArraysDocument13 pagesMismatch Power Loss in PV ArraysKyle RubricoNo ratings yet
- Effect of Altitude and Tilt Angle On Solar RadiationDocument14 pagesEffect of Altitude and Tilt Angle On Solar RadiationKyle RubricoNo ratings yet
- Calculation of The Size of The Mooring SystemDocument7 pagesCalculation of The Size of The Mooring SystemKyle RubricoNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PRD 104 Archivo Ingeteam Inc Wind Catalogue May 2013 Low ResDocument32 pagesPRD 104 Archivo Ingeteam Inc Wind Catalogue May 2013 Low ResAII2013No ratings yet
- Husky Hypet 400Document148 pagesHusky Hypet 400Bir Kamaldeep Singh100% (7)
- GC-1F Operators ManualDocument9 pagesGC-1F Operators Manualnhocti007No ratings yet
- Photoelectron SpectrosDocument16 pagesPhotoelectron SpectrosAditiNo ratings yet
- Deventci-R1, A-Lovech Block, North-West BulgariaDocument10 pagesDeventci-R1, A-Lovech Block, North-West BulgariaLeon100% (1)
- AMTED398078EN Part2 (Web)Document54 pagesAMTED398078EN Part2 (Web)jobpei2No ratings yet
- PC200-8 KomatsuDocument636 pagesPC200-8 Komatsujoao maria100% (1)
- Boiler Design ReviewDocument4 pagesBoiler Design ReviewKR PANo ratings yet
- In-Service Monitoring of Lubricating Oil For Auxiliary Power Plant EquipmentDocument20 pagesIn-Service Monitoring of Lubricating Oil For Auxiliary Power Plant Equipmentمحمد نصیریNo ratings yet
- Samba™PLC+HMI Installation Guide: General DescriptionDocument12 pagesSamba™PLC+HMI Installation Guide: General DescriptionDragisa DjukicNo ratings yet
- Data SheetDocument2 pagesData SheetFarid AfifiNo ratings yet
- 2019 KTM 350 SX-F XC-F Service Repair ManualDocument371 pages2019 KTM 350 SX-F XC-F Service Repair ManualMatjaz MetelkoNo ratings yet
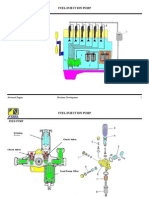
- 4fuel Injection PumpDocument9 pages4fuel Injection PumpJoko Sukariono100% (2)
- Energy Engg.-Lab ManualDocument51 pagesEnergy Engg.-Lab ManualManish JhadhavNo ratings yet
- Instruction Manual For 4 Stroke, 4 Cylinder, Mpfi Petrol Engine Test RIGDocument47 pagesInstruction Manual For 4 Stroke, 4 Cylinder, Mpfi Petrol Engine Test RIGAbhishek ShuklaNo ratings yet
- Tda-V 315-1120 Cat015 PDFDocument71 pagesTda-V 315-1120 Cat015 PDFDak Serik0% (1)
- KCA Bladder Tanks en 2010Document11 pagesKCA Bladder Tanks en 2010NovancyNo ratings yet
- XI-Chemistry-DOE Support Material 2019-20 - 2Document22 pagesXI-Chemistry-DOE Support Material 2019-20 - 2MeersNo ratings yet
- Propane Workshop PPTDocument71 pagesPropane Workshop PPTch.kashifpervez100% (1)
- Thermal Engineering Lectures1Document120 pagesThermal Engineering Lectures1romasokyNo ratings yet
- HS POLYBAG - NEW FACTORY ELECTRICAL SYSTEM 견적서 20190713 (최종)Document11 pagesHS POLYBAG - NEW FACTORY ELECTRICAL SYSTEM 견적서 20190713 (최종)Nhí LêNo ratings yet
- Cap 31Document100 pagesCap 31Gilmar FerrettiNo ratings yet
- Turbocor ChillerDocument14 pagesTurbocor ChillerRahulNo ratings yet
- Exam Style Answers 20 Asal Physics CBDocument2 pagesExam Style Answers 20 Asal Physics CBAnshul ShahNo ratings yet
- 2016 Zapata Hincapie John Alexander ThesisDocument84 pages2016 Zapata Hincapie John Alexander ThesisbetelgueseNo ratings yet
- Technical Capabilities PDI 2019 09Document10 pagesTechnical Capabilities PDI 2019 09carlosNo ratings yet
- Science 8 WorkbookDocument46 pagesScience 8 WorkbookPradeep WalaweNo ratings yet
- NIT Patna Department of Mechanical Engineering Subject-Turbo MachinesDocument26 pagesNIT Patna Department of Mechanical Engineering Subject-Turbo MachinesAjitKumarPandeyNo ratings yet
- DeVries1992 Book AnalysisOfMaterialRemovalProceDocument270 pagesDeVries1992 Book AnalysisOfMaterialRemovalProceRoberto Jorge Bezerra LauristonNo ratings yet
- CG Drive SGDocument1 pageCG Drive SGmanchem sreeram sanjay67% (3)