You might also like
- ODST Armor Kit Instructionsa PDFDocument81 pagesODST Armor Kit Instructionsa PDFArrow RoweNo ratings yet
- Final CPM & PertDocument66 pagesFinal CPM & Pertsafoun peyalNo ratings yet
- Empirical Metallogeny: Depositional Environments, Lithologic Associations and Metallic OresFrom EverandEmpirical Metallogeny: Depositional Environments, Lithologic Associations and Metallic OresNo ratings yet
- SOILMECHANICS Laboratory Manual 11 ExperimentsDocument58 pagesSOILMECHANICS Laboratory Manual 11 ExperimentsChristianNo ratings yet
- NSTP 2Document21 pagesNSTP 2chloeNo ratings yet
- Solution Manual for The Elements of Polymer Science and EngineeringFrom EverandSolution Manual for The Elements of Polymer Science and EngineeringRating: 4 out of 5 stars4/5 (3)
- Soil Mechanics and Foundations - (Chapter 10 Shear Strength of Soils) PDFDocument63 pagesSoil Mechanics and Foundations - (Chapter 10 Shear Strength of Soils) PDFFrancisco Reyes0% (1)
- Western Civilization: CH 4Document5 pagesWestern Civilization: CH 4LorenSolsberry100% (2)
- Natural and Built Environment PDFDocument16 pagesNatural and Built Environment PDFBrylle De GuzmanNo ratings yet
- Sop VR10Document53 pagesSop VR10didiNo ratings yet
- Boquillas C2000Document4 pagesBoquillas C2000LIZANA QUISPE ELMER ARSENIONo ratings yet
- RCD LectureDocument7 pagesRCD LectureJolie-Marie EspinedaNo ratings yet
- RCD LectureDocument7 pagesRCD LecturejlNo ratings yet
- Computer ProgrammingDocument105 pagesComputer ProgrammingNATNARONG VIRUNANONTNo ratings yet
- Sesión 1 EjemplosDocument10 pagesSesión 1 Ejemplossotele8903No ratings yet
- Modelacion Hidrologica e Hidraulica Aplicada A EstDocument16 pagesModelacion Hidrologica e Hidraulica Aplicada A Estharoladriano21No ratings yet
- KPLL Newsletter - OctoberDocument4 pagesKPLL Newsletter - OctoberlemenllNo ratings yet
- DblockDocument26 pagesDblockSanika DeokuleNo ratings yet
- Archive of SID: PearsonDocument8 pagesArchive of SID: PearsonBoom BoomNo ratings yet
- Windows 11 Printed DocumentDocument4 pagesWindows 11 Printed Documentayoubelboutahiri9No ratings yet
- (M F) Zelgadis Spin OffDocument16 pages(M F) Zelgadis Spin OffBruno PeroniNo ratings yet
- JHGJDocument140 pagesJHGJAnish SinghNo ratings yet
- Notas Sesión 22Document13 pagesNotas Sesión 22Maximiliano ReyesNo ratings yet
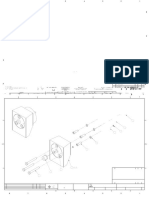
- Rev. Description Drawn Appr. Date Scale: Drg/Part No. 1:25 HolderDocument3 pagesRev. Description Drawn Appr. Date Scale: Drg/Part No. 1:25 HolderMalek KhaledNo ratings yet
- Cuardernos de Semiotica1 With Cover Page v2Document110 pagesCuardernos de Semiotica1 With Cover Page v2Axel KrustofskyNo ratings yet
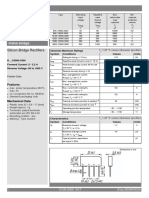
- Semipont 3: Power Bridge RectifiersDocument3 pagesSemipont 3: Power Bridge Rectifiersleonardo_melo_costaNo ratings yet
- SemiKron SKD - 82 - 07913100Document3 pagesSemiKron SKD - 82 - 07913100Mario Penelo RivaNo ratings yet
- SemiKron SKD-62 - 16Document3 pagesSemiKron SKD-62 - 16Mario Penelo RivaNo ratings yet
- Hilbert SpacesDocument24 pagesHilbert Spaceshyd arnesNo ratings yet
- Img 20221026 0013Document1 pageImg 20221026 0013jonathon strawbridgeNo ratings yet
- B.sc. Engineering 3.1, 2016Document14 pagesB.sc. Engineering 3.1, 2016MD SHAKIL AHMEDNo ratings yet
- UntitledDocument1 pageUntitledBrendan ReddinNo ratings yet
- Tears of Rain PDFDocument2 pagesTears of Rain PDFgervigamesNo ratings yet
- s59977 Ainul Syazwan Individual Assignment 2 Mkw4043Document13 pagess59977 Ainul Syazwan Individual Assignment 2 Mkw4043nqz2dnqvccNo ratings yet
- Recommended Method Statement For The Construction of The Retaining Wall at The Front of The House at 67 Dresden Road, N19 3BgDocument9 pagesRecommended Method Statement For The Construction of The Retaining Wall at The Front of The House at 67 Dresden Road, N19 3BgAmirul AmriNo ratings yet
- 0512020Document22 pages0512020oulima -No ratings yet
- Definitions For As Level Chemistry 9701Document5 pagesDefinitions For As Level Chemistry 9701The TechnicianNo ratings yet
- Commentary of Suratul JinnDocument160 pagesCommentary of Suratul JinnSaleem Bhimji100% (3)
- I I Ii: RfuteDocument8 pagesI I Ii: RfuteJohnCarloTigueNo ratings yet
- Wolfgang Palaver, On ViolenceDocument20 pagesWolfgang Palaver, On ViolencemorleysimonNo ratings yet
- Commentary of Suratul HujuratDocument313 pagesCommentary of Suratul HujuratSaleem Bhimji100% (1)
- Mat1322-2023-Notes03-Full 1Document8 pagesMat1322-2023-Notes03-Full 1ShuttlechairNo ratings yet
- Epidemiology and Causes of Preterm Birth - PMC HuDocument22 pagesEpidemiology and Causes of Preterm Birth - PMC HuPéter OlláriNo ratings yet
- Estimadores 1Document14 pagesEstimadores 1Emanuel RojasNo ratings yet
- Acta Sanctorum. 1863. Volume 20.Document1,030 pagesActa Sanctorum. 1863. Volume 20.Patrologia Latina, Graeca et Orientalis100% (1)
- Caixas-Ventilacao-0315 MedidasDocument1 pageCaixas-Ventilacao-0315 MedidasAndre BritoNo ratings yet
- Skyper 32 R L6100102Document16 pagesSkyper 32 R L6100102rzamodzkiNo ratings yet
- Heat ConductionDocument12 pagesHeat ConductionNuttibase CharupengNo ratings yet
- 2 Le Corps Comme Lieu Pour Etre PresentDocument8 pages2 Le Corps Comme Lieu Pour Etre PresentGioveNo ratings yet
- Chansons Des Rues La Parisienne Texane (Lamberg)Document8 pagesChansons Des Rues La Parisienne Texane (Lamberg)gaghiNo ratings yet
- COMP4204: Advanced Data Structure and Algorithms Tutorial 6 (Graphs)Document3 pagesCOMP4204: Advanced Data Structure and Algorithms Tutorial 6 (Graphs)محمد العبريNo ratings yet
- 01 FR 50s-Manuel AbregeDocument2 pages01 FR 50s-Manuel AbregeDjimalde HervéNo ratings yet
- Linear Systems Review SolutionsDocument2 pagesLinear Systems Review SolutionsAshnaa SrisiththananthanNo ratings yet
- Adc 9Document60 pagesAdc 9ati atiNo ratings yet
- Bhopal English Edition 2020 12 16 PDFDocument12 pagesBhopal English Edition 2020 12 16 PDFOXYMORONNo ratings yet
- Img 007Document1 pageImg 007lzyNo ratings yet
- MazouzeDocument18 pagesMazouzeMariane KaiNo ratings yet
- Inline BridgeDocument2 pagesInline BridgeHUGO SOARESNo ratings yet
- Mateus Asato - Time II Electric GuitarDocument6 pagesMateus Asato - Time II Electric GuitarFunky KotelettNo ratings yet
- Civil - 9. Railway-21-30Document10 pagesCivil - 9. Railway-21-30Mohd AhmadNo ratings yet
- PDF FileDocument4 pagesPDF FileyouminNo ratings yet
- CELI3 Giugno04 B.1Document8 pagesCELI3 Giugno04 B.1Явор СаръевNo ratings yet
- Mat1322-2023-Notes05-Full 1Document3 pagesMat1322-2023-Notes05-Full 1ShuttlechairNo ratings yet
- Parts of A StatuteDocument1 pageParts of A StatuteJouelle Kristine PeñaNo ratings yet
- Ejercicios Pliometricos Generales para eDocument13 pagesEjercicios Pliometricos Generales para eworldpin500No ratings yet
- I'm Not AshamedDocument1 pageI'm Not Ashamedcd chilloutNo ratings yet
- Away in A Manger GDocument1 pageAway in A Manger Gcd chilloutNo ratings yet
- Stand Up and Bless The Lord V2 in DDocument1 pageStand Up and Bless The Lord V2 in Dcd chilloutNo ratings yet
- Test 5Document1 pageTest 5cd chilloutNo ratings yet
- Angels FromDocument2 pagesAngels Fromcd chilloutNo ratings yet
- Upload TestDocument1 pageUpload Testcd chilloutNo ratings yet
- Tetrad Inversions - BlankDocument3 pagesTetrad Inversions - Blankcd chilloutNo ratings yet
- Tetrad Inversions - BlankijhDocument3 pagesTetrad Inversions - Blankijhcd chilloutNo ratings yet
- Tetrad Inversions - BlankDocument3 pagesTetrad Inversions - Blankcd chilloutNo ratings yet
- Tetrad Inversions - BlankDocument3 pagesTetrad Inversions - Blankcd chilloutNo ratings yet
- Arvel Gentry-8-Checking - Trim - On - The - WindDocument3 pagesArvel Gentry-8-Checking - Trim - On - The - WindTom BeeNo ratings yet
- Paul Signac, Excerpts From From Eugéne Delacroix To Neo-Impressionism (1899)Document7 pagesPaul Signac, Excerpts From From Eugéne Delacroix To Neo-Impressionism (1899)Petro VourisNo ratings yet
- Agency Theory EssayDocument2 pagesAgency Theory EssayAnggi KartikaNo ratings yet
- WEBSITE PHP PresentationDocument13 pagesWEBSITE PHP Presentationbalajidharani1978700No ratings yet
- 2021 Annual Budget Report - Luna, ApayaoDocument40 pages2021 Annual Budget Report - Luna, ApayaoMarvin OlidNo ratings yet
- Book ReviewDocument5 pagesBook ReviewMANOHAR SIVVALA 20111632No ratings yet
- DR TB Treatment Guideline of Timor Leste - REVISED 3 March 2021Document13 pagesDR TB Treatment Guideline of Timor Leste - REVISED 3 March 2021Yoan Manuel Ruiz ArencibiaNo ratings yet
- Us2-9a Study GuideDocument3 pagesUs2-9a Study Guideapi-517994178No ratings yet
- Free PRM Handbook PDFDocument2 pagesFree PRM Handbook PDFRichard0% (1)
- 2023 School Selection Form TemplateDocument2 pages2023 School Selection Form TemplatejessiequinieNo ratings yet
- Solution Manual For Community Nutrition in Action An Entrepreneurial Approach 7th Edition by Boyle ISBN 1305637992 9781305637993Document14 pagesSolution Manual For Community Nutrition in Action An Entrepreneurial Approach 7th Edition by Boyle ISBN 1305637992 9781305637993jaredhernandezbazicwejqt100% (25)
- Sipart dr24Document272 pagesSipart dr24geomariolisNo ratings yet
- Q3eSE RW2 U02A StudentDocument8 pagesQ3eSE RW2 U02A StudentNawal ALMALKINo ratings yet
- 27 August To 02 SeptemberDocument16 pages27 August To 02 SeptemberpratidinNo ratings yet
- Oxy-Fuel Tech & FurnacesDocument22 pagesOxy-Fuel Tech & FurnacesAlirƎza Mhzd100% (1)
- Lighting Global Standardized Specifications Book: Manufacturer: Component Family NameDocument4 pagesLighting Global Standardized Specifications Book: Manufacturer: Component Family NamemagaliNo ratings yet
- Eurocopter As350b3 N-R-D Check CriteriaDocument2 pagesEurocopter As350b3 N-R-D Check Criteria0605330% (1)
- COE Lab Report-1Document9 pagesCOE Lab Report-1Ahmad Al-MareiNo ratings yet
- Technology in Education FinalDocument11 pagesTechnology in Education FinalSaiful IslamNo ratings yet
- Britannia Industry Project MainDocument32 pagesBritannia Industry Project MainShanu Satheesan100% (1)
- Derma Quiz 3 NotesDocument11 pagesDerma Quiz 3 NotesJolaine ValloNo ratings yet
- Student Online Voting System: International Journal of Trend in Research and Development, Volume 2 (5), ISSN 2394-9333Document9 pagesStudent Online Voting System: International Journal of Trend in Research and Development, Volume 2 (5), ISSN 2394-9333Ermias GetachewNo ratings yet
- Sepsis and Pneumonia v1.3Document2 pagesSepsis and Pneumonia v1.3Luis HANo ratings yet
- Optical FibresDocument21 pagesOptical FibresSanjeev Kumar80% (5)