You might also like
- Radically Elementary Probability Theory. (AM-117), Volume 117From EverandRadically Elementary Probability Theory. (AM-117), Volume 117Rating: 4 out of 5 stars4/5 (2)
- 8b Basic Probability DistributionsDocument13 pages8b Basic Probability DistributionsChan AnsonNo ratings yet
- Prob DistDocument21 pagesProb Distsoumya dasNo ratings yet
- Distribution: Dr. H. Gladius Jennifer Associate Professor SPH, SrmistDocument23 pagesDistribution: Dr. H. Gladius Jennifer Associate Professor SPH, SrmistCharan KNo ratings yet
- Random Variables: Petter Mostad 2005.09.19Document24 pagesRandom Variables: Petter Mostad 2005.09.19liteepanNo ratings yet
- Chapter 3 - Special Probability DistributionsDocument45 pagesChapter 3 - Special Probability Distributionsjared demissieNo ratings yet
- Istanbul Aydin University: Chapter 4: Probability DistributionsDocument12 pagesIstanbul Aydin University: Chapter 4: Probability Distributionsxxnameless 97No ratings yet
- Quiz 2 Covered Materials In: - Chapter 5 - Chapter 6 - Chapter 7Document27 pagesQuiz 2 Covered Materials In: - Chapter 5 - Chapter 6 - Chapter 7Aaron Hayyat0% (1)
- Lecture 7 Random Variable Confidence IntervalDocument52 pagesLecture 7 Random Variable Confidence Intervalmariloh6102No ratings yet
- Random Variables and Probability Distributions Honors 281Document27 pagesRandom Variables and Probability Distributions Honors 281Jennifer HaddonNo ratings yet
- Statistics and Probability ReviewerDocument4 pagesStatistics and Probability Reviewermiel noahNo ratings yet
- FBA1202 Statistics W10Document104 pagesFBA1202 Statistics W10ilayda demirNo ratings yet
- BIOSTAT Random Variables & Probability DistributionDocument37 pagesBIOSTAT Random Variables & Probability DistributionAnonymous Xlpj86laNo ratings yet
- Presentation-WPS OfficeDocument11 pagesPresentation-WPS OfficePuzhal Selvi KNo ratings yet
- Descriptive Statistics: Frequency Distributions and Related StatisticsDocument47 pagesDescriptive Statistics: Frequency Distributions and Related Statisticsha ssanNo ratings yet
- Discrete Random Variables Topic SummaryDocument2 pagesDiscrete Random Variables Topic SummaryPerson GainableNo ratings yet
- Chapters7,8,9Document4 pagesChapters7,8,9sarkarigamingytNo ratings yet
- Lec 2Document51 pagesLec 2Zeyituna AbeNo ratings yet
- Expected Value:) P (X X X EDocument28 pagesExpected Value:) P (X X X EQuyên Nguyễn HảiNo ratings yet
- Unit 1: Random variables and probability distributionsDocument41 pagesUnit 1: Random variables and probability distributionsMariam LortkipanidzeNo ratings yet
- Chapter 06Document24 pagesChapter 06Yamac xxNo ratings yet
- Special Probability Distributions ExplainedDocument37 pagesSpecial Probability Distributions ExplainedGelli AgustinNo ratings yet
- Continuous Distribution SVDocument31 pagesContinuous Distribution SVMai Ý NhưNo ratings yet
- Share MCQS MODULE 5 RGPV MATHEMATICS IIIDocument13 pagesShare MCQS MODULE 5 RGPV MATHEMATICS IIIPawari Ho rhi h100% (1)
- Lecture 8 - Continuous Probability DistributionsDocument33 pagesLecture 8 - Continuous Probability DistributionsIsmadth2918388No ratings yet
- Floods: Frequency Analysis of Extreme EventsDocument34 pagesFloods: Frequency Analysis of Extreme EventskgizachewyNo ratings yet
- Probability Distribution IIDocument49 pagesProbability Distribution IIJamie FederizoNo ratings yet
- Kuliah 8 Hidrologi - 2017Document22 pagesKuliah 8 Hidrologi - 2017Agie RamdiansyahNo ratings yet
- Basic Statistics (3685) PPT - Lecture On 21-01-2019Document19 pagesBasic Statistics (3685) PPT - Lecture On 21-01-2019M Hammad ManzoorNo ratings yet
- 5 Probability DistributionsDocument88 pages5 Probability Distributionsnatiphbasha2015No ratings yet
- Lesson 6Document55 pagesLesson 6İbrahim KaraoğlanNo ratings yet
- Chapter 3Document33 pagesChapter 3VaradharajanSrinivasanNo ratings yet
- Lecture 4 Characteristics and SomeDocument34 pagesLecture 4 Characteristics and Somelondindlovu410No ratings yet
- Statistics My PresDocument16 pagesStatistics My PresNermin FaracullayevaNo ratings yet
- CH 02Document41 pagesCH 02Marwan SamyNo ratings yet
- Statistics Study Guide: Matthew Chesnes The London School of Economics September 22, 2001Document22 pagesStatistics Study Guide: Matthew Chesnes The London School of Economics September 22, 2001kjneroNo ratings yet
- Probability Distributions in RDocument42 pagesProbability Distributions in RNaski KuafniNo ratings yet
- PPT2-ProbabilityDocument41 pagesPPT2-ProbabilityRudy SilitongaNo ratings yet
- Normal DistributionDocument48 pagesNormal DistributionShashank Shekhar SharmaNo ratings yet
- Random Variables and Probability DistributionsDocument71 pagesRandom Variables and Probability DistributionsFatih İnalNo ratings yet
- Chapter 3, Numerical Descriptive Measures: - Data Analysis IsDocument21 pagesChapter 3, Numerical Descriptive Measures: - Data Analysis IsRafee HossainNo ratings yet
- Statistics - The Binomial Probability DistributionDocument15 pagesStatistics - The Binomial Probability DistributionALLAPARTHI SHANMUKHA PRIYA RAMA ABHILASH 15MIS0077No ratings yet
- Session 7Document12 pagesSession 7JITESHNo ratings yet
- Intro To Stats RecapDocument43 pagesIntro To Stats RecapAbhay ItaliyaNo ratings yet
- Chap4 ElsyDocument60 pagesChap4 ElsyKamil IbraNo ratings yet
- Discrete Random VariableDocument28 pagesDiscrete Random VariableEriick He'No ratings yet
- Commonly Used Probability Distribution - SHORTDocument26 pagesCommonly Used Probability Distribution - SHORTSharif MdNo ratings yet
- Continuous Probability Distributions ExplainedDocument73 pagesContinuous Probability Distributions ExplainedsupiobiaNo ratings yet
- Lecture 5 & 6 - StatisticsDocument41 pagesLecture 5 & 6 - StatisticsMohanad SulimanNo ratings yet
- Continuous Probability DistributionDocument47 pagesContinuous Probability DistributionBrigitta AngelinaNo ratings yet
- Chapter-Summary of BacalDocument11 pagesChapter-Summary of BacalTammy OgoyNo ratings yet
- Lecture 1Document10 pagesLecture 1李姿瑩No ratings yet
- TF3001 Sm2 09-10 Course Notes 7Document5 pagesTF3001 Sm2 09-10 Course Notes 7Jonathan KurniaNo ratings yet
- Types of Random VariablesDocument4 pagesTypes of Random VariablesHazell DNo ratings yet
- Priyanshu Majumder - 34900321060-1Document37 pagesPriyanshu Majumder - 34900321060-1PotterNo ratings yet
- Statistics Continuous DisributionDocument28 pagesStatistics Continuous Disributionmyrul_shafiqNo ratings yet
- Chapter 3 NorDIsDocument73 pagesChapter 3 NorDIsreg.anything29No ratings yet
- Module 3 Discrete Probability DistributionDocument22 pagesModule 3 Discrete Probability DistributionENIDNo ratings yet
- Business Decision Making II Continuous Probability DistributionsDocument11 pagesBusiness Decision Making II Continuous Probability DistributionsUyen ThuNo ratings yet
- Continuous Random VariableDocument44 pagesContinuous Random Variableranjitbiswal547No ratings yet
- Cumulative Test 1-5 B: GrammarDocument6 pagesCumulative Test 1-5 B: GrammarАлександрNo ratings yet
- 2017 Monthly Us Holidays CalendarDocument12 pages2017 Monthly Us Holidays CalendarKhairul RizalNo ratings yet
- En Example of Payment Change Due To EuriborDocument1 pageEn Example of Payment Change Due To Euriborha ssanNo ratings yet
- LAPOSTEDocument5 pagesLAPOSTEha ssanNo ratings yet
- Document Sans Titre12Document3 pagesDocument Sans Titre12ha ssanNo ratings yet
- Ancient Communication MethodsDocument6 pagesAncient Communication MethodsАлександрNo ratings yet
- Cumulative Test 1–9 B Grammar and VocabularyDocument6 pagesCumulative Test 1–9 B Grammar and Vocabularykmz0% (1)
- Sol3e Int Cumulative Test Answer Keys BDocument5 pagesSol3e Int Cumulative Test Answer Keys BJeronimo Gangoso Vega67% (3)
- DirDocument1 pageDirha ssanNo ratings yet
- Sol3e Int Cumulative Test 6-9 Test BDocument6 pagesSol3e Int Cumulative Test 6-9 Test BJeronimo Gangoso VegaNo ratings yet
- Unit 8 Progress Test B: GrammarDocument6 pagesUnit 8 Progress Test B: GrammarDragana Zoraja100% (3)
- Sol3e Int Cumulative Test 6-9 Test ADocument6 pagesSol3e Int Cumulative Test 6-9 Test AJeronimo Gangoso Vega100% (1)
- Unit 5 Progress Test B: GrammarDocument6 pagesUnit 5 Progress Test B: Grammarkmz86% (7)
- Sol3e Int U7 Progress Test ADocument6 pagesSol3e Int U7 Progress Test ANoeliaa de la CalleNo ratings yet
- Unit 2 Progress Test B: GrammarDocument5 pagesUnit 2 Progress Test B: Grammarkmz50% (2)
- Grammar and vocabulary testDocument2 pagesGrammar and vocabulary testha ssanNo ratings yet
- Presentation Francais CfiDocument128 pagesPresentation Francais Cfiha ssanNo ratings yet
- Unit 7 Progress Test B: GrammarDocument6 pagesUnit 7 Progress Test B: GrammarNoeliaa de la Calle0% (3)
- Unit 3 Short Test 1A: GrammarDocument2 pagesUnit 3 Short Test 1A: GrammarTanya KolinkovskaNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Key Grammar and Vocabulary Test for Unit 4 Short Test 1BDocument2 pagesKey Grammar and Vocabulary Test for Unit 4 Short Test 1BTanya KolinkovskaNo ratings yet
- Off Duty Rates For Airlines at Scandic Hotels 2015Document4 pagesOff Duty Rates For Airlines at Scandic Hotels 2015ha ssanNo ratings yet
- AlarmasDocument5,106 pagesAlarmasha ssanNo ratings yet
- ROBOTIKADocument1,021 pagesROBOTIKAha ssanNo ratings yet
- File HistoryDocument3 pagesFile HistoryZlata IveticNo ratings yet
- Special Travel Industry Rate Terms and ConditionsDocument4 pagesSpecial Travel Industry Rate Terms and Conditionsha ssanNo ratings yet
- LarmaDocument2,510 pagesLarmaha ssanNo ratings yet
- Descriptive Statistics: Frequency Distributions and Related StatisticsDocument47 pagesDescriptive Statistics: Frequency Distributions and Related Statisticsha ssanNo ratings yet
- Access To Power SickDocument14 pagesAccess To Power Sickha ssanNo ratings yet
- Quantitative Techniques For Business On28sept2015Document142 pagesQuantitative Techniques For Business On28sept2015Arundhati DasNo ratings yet
- HeightsDocument449 pagesHeightsMathur DineshNo ratings yet
- SQQS1013 Chapter 5Document23 pagesSQQS1013 Chapter 5Cyrilraincream100% (1)
- King Abdulaziz University Business Statistics Faculty of Science, Dep. of Statistics STAT 271Document8 pagesKing Abdulaziz University Business Statistics Faculty of Science, Dep. of Statistics STAT 271hazem 00No ratings yet
- Six SigmaDocument39 pagesSix Sigmakarthikkadapa82No ratings yet
- Hetroskedosticity: Assignment No # 3Document7 pagesHetroskedosticity: Assignment No # 3Anonymous Hx7MTiNo ratings yet
- Thermal Stability of Poly (Vinyl Chloride) (PVC) Resin: Standard Test Method ForDocument2 pagesThermal Stability of Poly (Vinyl Chloride) (PVC) Resin: Standard Test Method ForDiegoNo ratings yet
- 17840-S MX1101 ManualDocument9 pages17840-S MX1101 ManualMeNo ratings yet
- Statistical Process Control ChartsDocument40 pagesStatistical Process Control ChartsTalha Imran100% (1)
- Quality Control Chapter OutlineDocument34 pagesQuality Control Chapter OutlineNaufal ArndoNo ratings yet
- Normal Distribution ZDocument17 pagesNormal Distribution ZSenthilkumar DevarajNo ratings yet
- Basic Math: 1.1 Scipy Constants (Scipy - Constants)Document32 pagesBasic Math: 1.1 Scipy Constants (Scipy - Constants)ops sksNo ratings yet
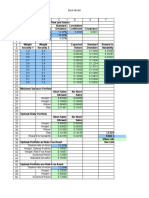
- BKM 10e Ch07 Two Security ModelDocument2 pagesBKM 10e Ch07 Two Security ModelJoe IammarinoNo ratings yet
- AssignmentDocument12 pagesAssignmentminakshi kamdiNo ratings yet
- 10 1 1 149 3936Document18 pages10 1 1 149 3936Stojan SavicNo ratings yet
- Data ManagementDocument19 pagesData ManagementKaitlinn Jamila AltatisNo ratings yet
- Office Automation Tools Short Study MaterialsDocument5 pagesOffice Automation Tools Short Study MaterialsMad GirlNo ratings yet
- Rationale of The SIM-geneticsDocument15 pagesRationale of The SIM-geneticsglemarNo ratings yet
- U03a1 Analytics Internship Executive Summary 1 Group Hal HagoodDocument9 pagesU03a1 Analytics Internship Executive Summary 1 Group Hal HagoodHalHagoodNo ratings yet
- E1815-08 (2013) E1 Standard Test Method For Classification of Film Systems For Industrial RadiographyDocument7 pagesE1815-08 (2013) E1 Standard Test Method For Classification of Film Systems For Industrial RadiographythoavitNo ratings yet
- Q3 Statistics and Probability 11 Module 2Document22 pagesQ3 Statistics and Probability 11 Module 2leonelyn.leceraNo ratings yet
- Labsheet - 2 - Java - ProgrammingDocument4 pagesLabsheet - 2 - Java - Programmingsarah smithNo ratings yet
- StatiticsDocument10 pagesStatiticsJovani TomaleNo ratings yet
- Introduction to the Normal Distribution (Bell CurveDocument9 pagesIntroduction to the Normal Distribution (Bell CurveZeeshan AkhtarNo ratings yet
- Internal Pressurization Failure Resistance of Unrestrained PackagesDocument5 pagesInternal Pressurization Failure Resistance of Unrestrained PackagesraulNo ratings yet
- Experiment 1: Measurement and Error AnalysisDocument11 pagesExperiment 1: Measurement and Error AnalysisAbram ReyesNo ratings yet
- Module 1-ADVANCED STATISTICSDocument10 pagesModule 1-ADVANCED STATISTICSRichel San AgustinNo ratings yet
- جزئيه الميدDocument53 pagesجزئيه الميدNouraNo ratings yet
- MST MATH Thesis Performance and Difficulties Encountered in Basic Mathematical OperationsDocument75 pagesMST MATH Thesis Performance and Difficulties Encountered in Basic Mathematical OperationsJovyrie Bantillo Sakilan100% (4)
- School Organizational Climate of Public Elementary Schools in Bulan DistrictDocument19 pagesSchool Organizational Climate of Public Elementary Schools in Bulan DistrictAJHSSR JournalNo ratings yet