You might also like
- Product and Service Design - Questions and AnswersDocument4 pagesProduct and Service Design - Questions and Answershakim_9569No ratings yet
- 1441 PDFDocument17 pages1441 PDFHaditsa Ghani FalahNo ratings yet
- Probation Period ReportDocument17 pagesProbation Period ReportMiranti Puspitasari0% (1)
- Real-Time Traffic Congestion PredictionDocument5 pagesReal-Time Traffic Congestion PredictionTutorial Storage TwoNo ratings yet
- Calibration of Vissim For Free HighwayDocument46 pagesCalibration of Vissim For Free Highwayjaya krishnaNo ratings yet
- Sheet: Interstate 80 Freeway DatasetDocument2 pagesSheet: Interstate 80 Freeway DatasetCE17B027 Kasara Sreetej ReddyNo ratings yet
- VTC2020Document5 pagesVTC2020mmorad aamraouyNo ratings yet
- Inter-Vehicular Communication Using Packet Network TheoryDocument7 pagesInter-Vehicular Communication Using Packet Network TheoryInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Attitudes of Metro Drivers Towards Design of Immediate Physical Environment and System LayoutDocument8 pagesAttitudes of Metro Drivers Towards Design of Immediate Physical Environment and System LayoutAlok MandalNo ratings yet
- Traffic Flow AnalysisDocument8 pagesTraffic Flow AnalysisMonika AcharyaNo ratings yet
- Carsim. Car-Following Model For Simulation of Traffic in Normal and Stop-And-Go ConditionsDocument14 pagesCarsim. Car-Following Model For Simulation of Traffic in Normal and Stop-And-Go ConditionsAg PradhiNo ratings yet
- Functional Evaluation of The Los Angeles Smart Card ®eld Operational TestDocument24 pagesFunctional Evaluation of The Los Angeles Smart Card ®eld Operational TestfahmiamroziNo ratings yet
- CV For Intelligent VehiclesDocument8 pagesCV For Intelligent Vehicleskashyap35No ratings yet
- TrafficDocument39 pagesTrafficCreate IInnocateNo ratings yet
- Alert SystemDocument7 pagesAlert SystemBalasaheb Bhausaheb Jadhav -No ratings yet
- RAF Driving AlgorithmDocument6 pagesRAF Driving AlgorithmAndXDDNo ratings yet
- Advancements in Railroad Track Inspection Using Machine-Vision TechnologyDocument30 pagesAdvancements in Railroad Track Inspection Using Machine-Vision TechnologyrcidgpoNo ratings yet
- RL Paper Latex v01d01Document6 pagesRL Paper Latex v01d01Anirudh RangarajanNo ratings yet
- Paper VehiclesDocument7 pagesPaper VehiclesShashankNo ratings yet
- In-Vehicle Camera Traffic Sign Detection PDFDocument17 pagesIn-Vehicle Camera Traffic Sign Detection PDFkashif khanNo ratings yet
- Presentation Review of ML in Sound Anoomally DetectionDocument15 pagesPresentation Review of ML in Sound Anoomally DetectionAdebisi RichardNo ratings yet
- Development of A New Integrated Local Trajectory Planning and Tracking Control Framework For Autonomous Ground VehiclesDocument20 pagesDevelopment of A New Integrated Local Trajectory Planning and Tracking Control Framework For Autonomous Ground Vehicles段星星No ratings yet
- Preemtionmanual 2004Document170 pagesPreemtionmanual 2004igoklyNo ratings yet
- An Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance SystemDocument23 pagesAn Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance SystemRaja ChandruNo ratings yet
- Block 1: (Lectures 2, 3)Document21 pagesBlock 1: (Lectures 2, 3)Sourabh LadhiNo ratings yet
- Performance Evaluation of Adaptive Ramp-Metering ADocument10 pagesPerformance Evaluation of Adaptive Ramp-Metering AEdson Lozano LafforeNo ratings yet
- Large-Scale Agent-Based Traffic Micro-Simulation ExperiencesDocument6 pagesLarge-Scale Agent-Based Traffic Micro-Simulation ExperiencesMubashir SheheryarNo ratings yet
- System Optimal Time - Dependent PathDocument10 pagesSystem Optimal Time - Dependent PathShangbo WangNo ratings yet
- Evaluation Traffic Simulation ModelsDocument7 pagesEvaluation Traffic Simulation ModelsTanzila RahmanNo ratings yet
- 6 - Lane Recognition Technique Using Hough TransformDocument6 pages6 - Lane Recognition Technique Using Hough TransformDr. Dnyaneshwar KirangeNo ratings yet
- Development of Adaptive Performance Models For Oklahoma Airfield Pavement Management SystemDocument11 pagesDevelopment of Adaptive Performance Models For Oklahoma Airfield Pavement Management SystemandrsmontecinosNo ratings yet
- Coordinated Traffic Signal System Adaptive For Vehicle Density Technical PaperDocument9 pagesCoordinated Traffic Signal System Adaptive For Vehicle Density Technical PaperPasinduNo ratings yet
- Automatic Vehicle Counting Based On Surveillance Video StreamsDocument10 pagesAutomatic Vehicle Counting Based On Surveillance Video StreamsWelleah Mae T. LacsonNo ratings yet
- A Real-Time Motion Planner With Trajectory Optimization For Autonomous VehiclesDocument7 pagesA Real-Time Motion Planner With Trajectory Optimization For Autonomous Vehiclesabbas boumenjelNo ratings yet
- Smart Signal Control System For Accident Prevention and Arterial Speed Harmonization Under Connected Vehicle EnvironmentDocument11 pagesSmart Signal Control System For Accident Prevention and Arterial Speed Harmonization Under Connected Vehicle Environmentchongqi heNo ratings yet
- Pour Mehra B 2019Document10 pagesPour Mehra B 2019Ouadoudi ZytouneNo ratings yet
- I83 MP BookletDocument68 pagesI83 MP BookletShawn StevensNo ratings yet
- A Stochastic Geometry Model For Multi-Hop Highway Vehicular CommunicationDocument16 pagesA Stochastic Geometry Model For Multi-Hop Highway Vehicular CommunicationAnkit AgrawalNo ratings yet
- Use of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysDocument19 pagesUse of Vehicle Signature Analysis and Lexicographic Optimization For Vehicle Reidenti®cation On FreewaysIndra PanggaloNo ratings yet
- EC1-dynamic Traffic Light Control SystemDocument12 pagesEC1-dynamic Traffic Light Control SystemUsnish MajumdarNo ratings yet
- Pressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular NetworksDocument10 pagesPressure Traffic Signal Control With Fixed and Adaptive Routing For Urban Vehicular Networksnaumanhaider007No ratings yet
- Calibration and Validation of A Micro-Simulation Model in Network AnalysisDocument17 pagesCalibration and Validation of A Micro-Simulation Model in Network AnalysisAnatta OngNo ratings yet
- Using Arena For Simulation of Pedestrian Crossing in Roundabout AreasDocument8 pagesUsing Arena For Simulation of Pedestrian Crossing in Roundabout AreasashlyduartNo ratings yet
- 2009 Chaudry RanjitkarDocument15 pages2009 Chaudry RanjitkarAskhin Al ImranNo ratings yet
- J. Vis. Commun. Image R.: Xiaobing Ding, Zhigang Liu, Haibo XuDocument11 pagesJ. Vis. Commun. Image R.: Xiaobing Ding, Zhigang Liu, Haibo XuJulio Mario DazaNo ratings yet
- Synopsis 1Document6 pagesSynopsis 1Jp SahooNo ratings yet
- An Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesDocument12 pagesAn Evaluation of Inter-Vehicle Ad Hoc Networks Based On Realistic Vehicular TracesAsma BenTiba Epouse KribiNo ratings yet
- Vehicle Lane Change Maneuver in Automated Highway Systems: January 1994Document45 pagesVehicle Lane Change Maneuver in Automated Highway Systems: January 1994Othman NchifaNo ratings yet
- Conference PaperDocument4 pagesConference PaperHelenaNo ratings yet
- Batch 10 - 22cem3s01Document23 pagesBatch 10 - 22cem3s01AkashNo ratings yet
- Impact Bottleneck Merge LOSDocument11 pagesImpact Bottleneck Merge LOSade syuraNo ratings yet
- Computer Vision Techniques For Traffic Flow ComputDocument11 pagesComputer Vision Techniques For Traffic Flow Computharrouche riadhNo ratings yet
- Indian Railway Training For B Tech UPTU GBTU MTU RGPVDocument44 pagesIndian Railway Training For B Tech UPTU GBTU MTU RGPVAugust mishraNo ratings yet
- Paper 1Document6 pagesPaper 1pavithrask.unibwNo ratings yet
- Literature Review On Traffic SignalsDocument4 pagesLiterature Review On Traffic Signalsaflstquqx100% (1)
- Proposed Analytical For Estimating Capacity and Level of Service of Major Freeway Weaving SectionsDocument11 pagesProposed Analytical For Estimating Capacity and Level of Service of Major Freeway Weaving SectionsIsaac saenzNo ratings yet
- T A N A: Opics in Utomotive Etworking and PplicationsDocument2 pagesT A N A: Opics in Utomotive Etworking and PplicationsKarniNo ratings yet
- The Evaluation of A Motion Base Driving Simulator in A Cave at TacomDocument8 pagesThe Evaluation of A Motion Base Driving Simulator in A Cave at TacomYok Böle BişiNo ratings yet
- Transportation Management SystemsDocument20 pagesTransportation Management SystemsMiaNo ratings yet
- Parking Sensing and Information System: Sensors, Deployment, and EvaluationDocument13 pagesParking Sensing and Information System: Sensors, Deployment, and EvaluationNoobstaxD AhmedNo ratings yet
- Safety Impacts of Queue Warning in A Connected Vehicle EnvironmentDocument7 pagesSafety Impacts of Queue Warning in A Connected Vehicle Environmentniluh shintaNo ratings yet
- Data-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryFrom EverandData-Driven Traffic Engineering: Understanding of Traffic and Applications Based on Three-Phase Traffic TheoryNo ratings yet
- WorleyDocument1 pageWorleyemmanuel eliyaNo ratings yet
- Dodoma CC Jobs June 22Document5 pagesDodoma CC Jobs June 22emmanuel eliyaNo ratings yet
- Wqs Worley Jobs PG 37Document1 pageWqs Worley Jobs PG 37emmanuel eliyaNo ratings yet
- Metric Data 08 - Standard Furniture SizesDocument4 pagesMetric Data 08 - Standard Furniture Sizesemmanuel eliyaNo ratings yet
- Registered Engs December 16 2022Document30 pagesRegistered Engs December 16 2022emmanuel eliyaNo ratings yet
- Tender AdvertDocument3 pagesTender Advertemmanuel eliyaNo ratings yet
- How To Update Actual Project Progress in Primavera: Activity ID Activity Name Started Finished % Design and EngineeringDocument15 pagesHow To Update Actual Project Progress in Primavera: Activity ID Activity Name Started Finished % Design and Engineeringemmanuel eliyaNo ratings yet
- Saving Schedule As Baseline in PrimaveraDocument14 pagesSaving Schedule As Baseline in Primaveraemmanuel eliyaNo ratings yet
- Working With Activities Layout in Primavera: Home Primavera Primavera and Project ManagementDocument14 pagesWorking With Activities Layout in Primavera: Home Primavera Primavera and Project Managementemmanuel eliyaNo ratings yet
- Do Project Scheduling in PrimaveraDocument11 pagesDo Project Scheduling in Primaveraemmanuel eliyaNo ratings yet
- 2005 - Aimsun VS VissimDocument32 pages2005 - Aimsun VS Vissimemmanuel eliyaNo ratings yet
- Create Project and Activity Constraints in PrimaveraDocument12 pagesCreate Project and Activity Constraints in Primaveraemmanuel eliyaNo ratings yet
- 2006 - Its For South Africa Impact Assessment Through Micro SimulationDocument213 pages2006 - Its For South Africa Impact Assessment Through Micro Simulationemmanuel eliyaNo ratings yet
- 2005 - Microscopic Traffic Simulation For ItsDocument39 pages2005 - Microscopic Traffic Simulation For Itsemmanuel eliyaNo ratings yet
- 2006 - Assessment of Its Measures For South AfricaDocument13 pages2006 - Assessment of Its Measures For South Africaemmanuel eliyaNo ratings yet
- 2007 - Safety Improvements Through Its Based On MicrosimulationDocument11 pages2007 - Safety Improvements Through Its Based On Microsimulationemmanuel eliyaNo ratings yet
- School Management System: A Synopsis Submitted in Partial Fulfillment of The Requirements For The Degree of inDocument12 pagesSchool Management System: A Synopsis Submitted in Partial Fulfillment of The Requirements For The Degree of inankush rathorNo ratings yet
- Configuring The Thomson Gateway SIP ServerDocument15 pagesConfiguring The Thomson Gateway SIP ServerFurueiNo ratings yet
- KTA-290 Manual - NOT RSPDDocument13 pagesKTA-290 Manual - NOT RSPDMagnus Clarkson100% (1)
- Equipment Installation Verification Procedure:: How To Use This DocumentDocument3 pagesEquipment Installation Verification Procedure:: How To Use This DocumentBasha Yazn AnjakNo ratings yet
- Entrepreneurship: Module 1-Common and Core Competencies in EntrepreneurshipDocument12 pagesEntrepreneurship: Module 1-Common and Core Competencies in EntrepreneurshipMylene CandidoNo ratings yet
- Power Electronics: DR - Arkan A.Hussein Power Electronics Fourth ClassDocument13 pagesPower Electronics: DR - Arkan A.Hussein Power Electronics Fourth Classmohammed aliNo ratings yet
- Ethics in Software Engineering PDFDocument2 pagesEthics in Software Engineering PDFJessicaNo ratings yet
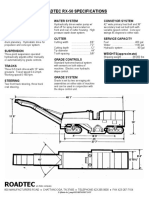
- RX 50 SpecDocument1 pageRX 50 SpecFelipe HernándezNo ratings yet
- Basic Structural Analysis, 3/e: Book Information Sheet Book Information SheetDocument2 pagesBasic Structural Analysis, 3/e: Book Information Sheet Book Information SheetHOUSEFULL MOVIE'SNo ratings yet
- Ali Erdemir: Professional ExperienceDocument3 pagesAli Erdemir: Professional ExperienceDunkMeNo ratings yet
- 15 Causes of Project FailureDocument3 pages15 Causes of Project FailureEyuael Solomon100% (2)
- Mg375 ExamDocument12 pagesMg375 ExamdasheNo ratings yet
- Chapter2 Mobility ManagementDocument13 pagesChapter2 Mobility ManagementSuraj Shah0% (2)
- Humidity Ebook 2017 B211616ENDocument17 pagesHumidity Ebook 2017 B211616ENgustavohdez2No ratings yet
- Spare Parts: Model: PUMP LKH-20/140 4.5kW 60HZ Date: 3/9/2022 No of Units: 1 1Document4 pagesSpare Parts: Model: PUMP LKH-20/140 4.5kW 60HZ Date: 3/9/2022 No of Units: 1 1Jose GalindoNo ratings yet
- Sravanti - SSE - MNR SolutionsDocument4 pagesSravanti - SSE - MNR SolutionsshanNo ratings yet
- A320 NEO Abbreviations LEAP-1ADocument5 pagesA320 NEO Abbreviations LEAP-1AwenjukwaxNo ratings yet
- ECS-ExtremeWireless Cloud - Lab Guide Notes Format v21.04Document185 pagesECS-ExtremeWireless Cloud - Lab Guide Notes Format v21.04DavidNo ratings yet
- Mysql Connector - Version 1.1: PropertiesDocument6 pagesMysql Connector - Version 1.1: PropertiesbruxotoloNo ratings yet
- As 2118.6-1995 Automatic Fire Sprinkler Systems Combined Sprinkler and HydrantDocument7 pagesAs 2118.6-1995 Automatic Fire Sprinkler Systems Combined Sprinkler and HydrantSAI Global - APACNo ratings yet
- Oil Contains Fuel: Shutdown SISDocument3 pagesOil Contains Fuel: Shutdown SISOecox Cah DjadoelNo ratings yet
- Google's Country ExperiencesDocument5 pagesGoogle's Country ExperiencesCsaba KöbliNo ratings yet
- Chapter One: Introduction & Review of Principles of Object OrientationDocument50 pagesChapter One: Introduction & Review of Principles of Object OrientationhenokNo ratings yet
- Case Study: © 2021 RTO WorksDocument20 pagesCase Study: © 2021 RTO WorksFrancis Dave Peralta BitongNo ratings yet
- MB-910 enDocument74 pagesMB-910 enadrianoglopesNo ratings yet
- GSX9000 Server GuideDocument6 pagesGSX9000 Server Guideshoaib50100% (1)
- En Iso 9712 - 2013Document42 pagesEn Iso 9712 - 2013alilka404No ratings yet
- Design and Development of CNC Writing and Drawing MachineDocument6 pagesDesign and Development of CNC Writing and Drawing MachineVIVA-TECH IJRINo ratings yet