You might also like
- Anti AliasingDocument58 pagesAnti Aliasingrahaf33No ratings yet
- CS 391L Machine Learning Course SyllabusDocument2 pagesCS 391L Machine Learning Course SyllabusOm SinghNo ratings yet
- L5 - Strided Conv, LPF, HPFDocument111 pagesL5 - Strided Conv, LPF, HPFAgha KazimNo ratings yet
- Convolutional Neural NetworksDocument55 pagesConvolutional Neural NetworksaliNo ratings yet
- Additional CNNDocument82 pagesAdditional CNNLOGESH WARAN PNo ratings yet
- Lec 5Document28 pagesLec 5Amr ElsakkaNo ratings yet
- Final Trial MLDocument4 pagesFinal Trial MLRaghav RawatNo ratings yet
- HODL Lec 3 DNNs For Vision 1Document36 pagesHODL Lec 3 DNNs For Vision 1Josh LiNo ratings yet
- Face Recognition Using FacenetDocument46 pagesFace Recognition Using Facenetvasavi collegeNo ratings yet
- CNN 22mar2017Document110 pagesCNN 22mar2017Rahul AryanNo ratings yet
- Unit4 CNNDocument187 pagesUnit4 CNNAlekhya RoyNo ratings yet
- Now Playing:: Volume 1 (1959-1968)Document43 pagesNow Playing:: Volume 1 (1959-1968)Charles MatuNo ratings yet
- Non Linear FilteringDocument42 pagesNon Linear FilteringAnonymous 2WKRBqFlfNo ratings yet
- SKM4213 C3 Pre-ProcessingDocument80 pagesSKM4213 C3 Pre-ProcessingIezma MadzinNo ratings yet
- Image Enhancement in Spatial DomainDocument43 pagesImage Enhancement in Spatial DomainMahreenNo ratings yet
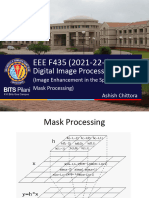
- DIP Lec 11 Image Enhancement Mask ProcessingDocument28 pagesDIP Lec 11 Image Enhancement Mask ProcessingDivishtha MalikNo ratings yet
- Module2 ImageEnhancement PreprocessDocument53 pagesModule2 ImageEnhancement Preprocesskobaya7455No ratings yet
- Spatial Filtering: CS474/674 - Prof. BebisDocument55 pagesSpatial Filtering: CS474/674 - Prof. BebisNitheeshNo ratings yet
- Image Processing (EE 608) (Aug-Dec 2016) Programming Assignment 3Document1 pageImage Processing (EE 608) (Aug-Dec 2016) Programming Assignment 3violis sNo ratings yet
- Convolutional Neural Network: Sudeshna Sarkar 22/2/17, 23/2/17, 24/2/17Document120 pagesConvolutional Neural Network: Sudeshna Sarkar 22/2/17, 23/2/17, 24/2/17Sreenivasareddy DevarapalliNo ratings yet
- Lec2 LTI B PDFDocument40 pagesLec2 LTI B PDFIrum Nausheen Lecturer - FETNo ratings yet
- Spatial Filtering (Chapter 3) : CS474/674 - Prof. BebisDocument47 pagesSpatial Filtering (Chapter 3) : CS474/674 - Prof. BebisDeepaNo ratings yet
- Spatial Filtering (Chapter 3) : CS474/674 - Prof. BebisDocument48 pagesSpatial Filtering (Chapter 3) : CS474/674 - Prof. BebisVithubhavani S HNo ratings yet
- Advanced Machine Learning: Neural Networks Decision Trees Random Forest XgboostDocument61 pagesAdvanced Machine Learning: Neural Networks Decision Trees Random Forest XgboostArun KumarNo ratings yet
- Generating FunctionsDocument27 pagesGenerating Functionsclb68296No ratings yet
- Deep LearningDocument90 pagesDeep LearningRivujit DasNo ratings yet
- Image Filtering 1Document64 pagesImage Filtering 1amir hosseinNo ratings yet
- 5 - Convolutional Neural NetworkDocument14 pages5 - Convolutional Neural Networkabbas1999n8No ratings yet
- CS 601 Machine Learning Unit 3Document37 pagesCS 601 Machine Learning Unit 3Priyanka BhateleNo ratings yet
- Spatial FilteringDocument45 pagesSpatial Filteringsboy888No ratings yet
- Digital Image ProcessingDocument31 pagesDigital Image ProcessingHatem DheerNo ratings yet
- P3-Arithmetic and Logic OperationsDocument35 pagesP3-Arithmetic and Logic OperationsyakaellahNo ratings yet
- UNIT 1-2 ResolutionStorageConvolutionDocument31 pagesUNIT 1-2 ResolutionStorageConvolutionIron ManNo ratings yet
- 02 SamplingDocument13 pages02 SamplingSatyanarayan Reddy KNo ratings yet
- Kuliah 8Document21 pagesKuliah 8Fakhri KalbuadiNo ratings yet
- Convolutional Neural NetworkDocument55 pagesConvolutional Neural Networkraj858778No ratings yet
- Neural Networks - An Introduction: Slide 1Document51 pagesNeural Networks - An Introduction: Slide 1ManlNo ratings yet
- Casino GamesDocument12 pagesCasino Gamesapi-559045701No ratings yet
- Proc ImaginiDocument54 pagesProc ImaginiAlexandru EugenNo ratings yet
- LTI System: Digital Signal ProcessingDocument40 pagesLTI System: Digital Signal ProcessingIrum Nausheen Lecturer - FETNo ratings yet
- Six Sigma 2020Document17 pagesSix Sigma 2020Dea SafitriNo ratings yet
- Second Exam 2021-22Document14 pagesSecond Exam 2021-22Luís LopesNo ratings yet
- 5 Lecture DIP Image Enhancement Spatial P2 DrTahirNawazDocument61 pages5 Lecture DIP Image Enhancement Spatial P2 DrTahirNawazzain sajidNo ratings yet
- Neural Net - ModiDocument16 pagesNeural Net - ModiSatishKakarlaNo ratings yet
- Machine Learning Unit 3Document40 pagesMachine Learning Unit 3read4freeNo ratings yet
- 6-DeepVisualLearning L6Document82 pages6-DeepVisualLearning L6hisisthesongoficeandfireNo ratings yet
- Handwritten Numeric and Alphabetic Character Recognition and Signature Verification Using Neural NetworkDocument25 pagesHandwritten Numeric and Alphabetic Character Recognition and Signature Verification Using Neural NetworkGnits ItbNo ratings yet
- Image FilteringDocument21 pagesImage FilteringAndrei ChihNo ratings yet
- Spatial FilteringDocument50 pagesSpatial FilteringeduhelloNo ratings yet
- Lab 5Document11 pagesLab 5SupriyaNo ratings yet
- Lecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanDocument54 pagesLecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanybNo ratings yet
- A Comprehensive Tutorial To Learn Convolutional Neural Networks From ScratchDocument11 pagesA Comprehensive Tutorial To Learn Convolutional Neural Networks From ScratchTalha AslamNo ratings yet
- DL New DA1Document20 pagesDL New DA1salugu.janakimanoj2020No ratings yet
- Lect3 PDFDocument47 pagesLect3 PDFphysicsnewblolNo ratings yet
- Q: What Is ANN?: X H X H X H X X X HDocument9 pagesQ: What Is ANN?: X H X H X H X X X HMuhammad Ahsan AkhtarNo ratings yet
- Lecture 3Document64 pagesLecture 3Reema AmgadNo ratings yet
- Digital Image Processing: DR V ShreedharaDocument55 pagesDigital Image Processing: DR V Shreedharaአስጠኚ TUBENo ratings yet
- Chapter 19Document102 pagesChapter 19RichurajanNo ratings yet
- Spasial FilterDocument4 pagesSpasial FilterDodik AdhitamaNo ratings yet
- Pretraining and Fine Tuning: Shusen WangDocument41 pagesPretraining and Fine Tuning: Shusen WangMInh ThanhNo ratings yet
- Neural Architecture Search: BasicsDocument20 pagesNeural Architecture Search: BasicsMInh ThanhNo ratings yet
- 14 Parallel 3Document56 pages14 Parallel 3MInh ThanhNo ratings yet
- Differentiable NAS: Shusen WangDocument42 pagesDifferentiable NAS: Shusen WangMInh ThanhNo ratings yet
- RNN + RL: Shusen WangDocument51 pagesRNN + RL: Shusen WangMInh ThanhNo ratings yet
- Few-Shot Learning: Shusen WangDocument42 pagesFew-Shot Learning: Shusen WangMInh ThanhNo ratings yet
- 2022 Streaming Summit NetflixDocument100 pages2022 Streaming Summit NetflixMInh ThanhNo ratings yet
- Siamese Network: Shusen WangDocument51 pagesSiamese Network: Shusen WangMInh ThanhNo ratings yet
- 14 Parallel 4Document59 pages14 Parallel 4MInh ThanhNo ratings yet
- Actor-Critic Methods: Shusen WangDocument35 pagesActor-Critic Methods: Shusen WangMInh ThanhNo ratings yet
- 14 Parallel 1Document51 pages14 Parallel 1MInh ThanhNo ratings yet
- Data Poisoning Attacks: Shusen WangDocument17 pagesData Poisoning Attacks: Shusen WangMInh ThanhNo ratings yet
- 14 Parallel 2Document28 pages14 Parallel 2MInh ThanhNo ratings yet
- 13 RL 5Document70 pages13 RL 5MInh ThanhNo ratings yet
- Policy-Based Reinforcement Learning: Shusen WangDocument46 pagesPolicy-Based Reinforcement Learning: Shusen WangMInh ThanhNo ratings yet
- Value-Based Reinforcement Learning: Shusen WangDocument53 pagesValue-Based Reinforcement Learning: Shusen WangMInh ThanhNo ratings yet
- 9 RNN 8Document48 pages9 RNN 8MInh ThanhNo ratings yet
- Image Caption: Shusen WangDocument35 pagesImage Caption: Shusen WangMInh ThanhNo ratings yet
- Neural Machine Translation: Shusen WangDocument57 pagesNeural Machine Translation: Shusen WangMInh ThanhNo ratings yet
- Vision Transformer (Vit) : Shusen WangDocument35 pagesVision Transformer (Vit) : Shusen WangvamsicfgNo ratings yet
- Reinforcement Learning Basics: Shusen WangDocument95 pagesReinforcement Learning Basics: Shusen WangMInh ThanhNo ratings yet
- 9 RNN 9Document34 pages9 RNN 9MInh ThanhNo ratings yet
- 10 Transformer 2Document56 pages10 Transformer 2MInh ThanhNo ratings yet
- Text Generation: Shusen WangDocument49 pagesText Generation: Shusen WangMInh ThanhNo ratings yet
- Recurrent Neural Networks (RNNS) : Shusen WangDocument33 pagesRecurrent Neural Networks (RNNS) : Shusen WangMInh ThanhNo ratings yet
- Making Rnns More Effective: Shusen WangDocument21 pagesMaking Rnns More Effective: Shusen WangMInh ThanhNo ratings yet
- 10 Transformer 1Document47 pages10 Transformer 1MInh ThanhNo ratings yet
- Idirectional Ncoder Epresentations From Ransformers : B E R T BertDocument26 pagesIdirectional Ncoder Epresentations From Ransformers : B E R T BertMInh ThanhNo ratings yet
- Text Processing and Word Embedding: Shusen WangDocument48 pagesText Processing and Word Embedding: Shusen WangMInh ThanhNo ratings yet
- Long Short Term Memory (LSTM) : Shusen WangDocument26 pagesLong Short Term Memory (LSTM) : Shusen WangMInh ThanhNo ratings yet
- Ementora Courses - Unit 1 Introduction To Artificial Intelligence and Machine LearningDocument19 pagesEmentora Courses - Unit 1 Introduction To Artificial Intelligence and Machine LearningArnab MandalNo ratings yet
- Python IEEE Project Titles 2022 2023Document3 pagesPython IEEE Project Titles 2022 2023Aditya sonawaneNo ratings yet
- Artificial Intelligence ADI INDEXDocument10 pagesArtificial Intelligence ADI INDEXRudra VermaNo ratings yet
- ICT - Artificial IntelligenceDocument14 pagesICT - Artificial IntelligenceFreaky AlchemistNo ratings yet
- Artificial IntelligenceDocument13 pagesArtificial IntelligenceNoor Ul EmanNo ratings yet
- Presentation 1Document36 pagesPresentation 1Sayani ChandraNo ratings yet
- Automatic Number Plate Recognition 1Document20 pagesAutomatic Number Plate Recognition 1ABHISHEK CHAKRABORTYNo ratings yet
- A Threshold Selection Method From Gray-Level HistogramsDocument5 pagesA Threshold Selection Method From Gray-Level HistogramsjfhackNo ratings yet
- ML, DL Questions: Downloaded FromDocument4 pagesML, DL Questions: Downloaded FromAryan RajNo ratings yet
- Nanotechnology Based Drug Delivery System,: "Nanomedicine"Document10 pagesNanotechnology Based Drug Delivery System,: "Nanomedicine"rohit a bhosaleNo ratings yet
- 11 - Vietnamese Text Classification and Sentiment BasedDocument3 pages11 - Vietnamese Text Classification and Sentiment BasedPhan Dang KhoaNo ratings yet
- Exploring Synergistic Applications of Quantum Computing and Artificial IntelligenceDocument2 pagesExploring Synergistic Applications of Quantum Computing and Artificial IntelligenceDefiancez DefiancezNo ratings yet
- Book Name Authors Publisher Amazon LinkDocument2 pagesBook Name Authors Publisher Amazon LinkOmar ShahidNo ratings yet
- NanoDocument10 pagesNanoMarjannah PagayawanNo ratings yet
- Reviewer For StasDocument19 pagesReviewer For StasFrances De GuzmanNo ratings yet
- AIDocument48 pagesAIendro123No ratings yet
- Expert Systems PDFDocument2 pagesExpert Systems PDFSyedNo ratings yet
- Why Chat GPT Is BestDocument2 pagesWhy Chat GPT Is BestMosfiqur RahmanNo ratings yet
- Plasmonic Metamaterial PDFDocument9 pagesPlasmonic Metamaterial PDFgNo ratings yet
- ETEG 425 Internal Exam Questions 2021Document2 pagesETEG 425 Internal Exam Questions 2021subashNo ratings yet
- Classification of Research PaperDocument10 pagesClassification of Research PaperBharath DesikanNo ratings yet
- Multilayer Perceptron AlgorithmDocument3 pagesMultilayer Perceptron AlgorithmHari hara Sudhan .MNo ratings yet
- ANN CO2 Session9Document14 pagesANN CO2 Session9Saikiran KNo ratings yet
- Deep Learning-KTUDocument6 pagesDeep Learning-KTUNAJIYA NAZRIN P NNo ratings yet
- AI Assi FinalDocument11 pagesAI Assi FinalPavana H ANo ratings yet
- Artificial IntelligenceDocument17 pagesArtificial IntelligenceRitu ShahNo ratings yet
- CS 370 - Artificial IntelligenceDocument26 pagesCS 370 - Artificial IntelligenceANo ratings yet
- Machine Learning: CourseDocument44 pagesMachine Learning: CourseMohammad SharifNo ratings yet
- Ekosistem Bisnis Iot Di Indonesia: Fita Indah MaulaniDocument13 pagesEkosistem Bisnis Iot Di Indonesia: Fita Indah MaulaniAgung Kus SugihartoNo ratings yet