You might also like
- Practice QuestionsDocument2 pagesPractice QuestionsAmmiraju Gorti ChoudharyNo ratings yet
- Algorithms in General Synchronous Networks: Zwshen@seu Edu CN Zwshen@seu - Edu.cnDocument112 pagesAlgorithms in General Synchronous Networks: Zwshen@seu Edu CN Zwshen@seu - Edu.cnSajishaNo ratings yet
- Multi Neuron Heuristic SearchDocument29 pagesMulti Neuron Heuristic SearchRahul KalaNo ratings yet
- AA Project ReportDocument13 pagesAA Project ReportDhyey ValeraNo ratings yet
- SyncbitpatDocument1 pageSyncbitpatmaabboudNo ratings yet
- Ns 6Document36 pagesNs 6Andresito SisayNo ratings yet
- Gemini Ps 626i 676i Manual de UsuarioDocument12 pagesGemini Ps 626i 676i Manual de UsuarioTito GuzmanNo ratings yet
- Cataclysmic - Destiny 2 Legendary Linear Fusion Rifle - Possible Rolls - Light - GGDocument1 pageCataclysmic - Destiny 2 Legendary Linear Fusion Rifle - Possible Rolls - Light - GGMagnum AelaNo ratings yet
- Image Segmentation, Representation and DescriptionDocument40 pagesImage Segmentation, Representation and DescriptionButta Rajasekhar100% (1)
- Assignment DES AlgorithmDocument7 pagesAssignment DES AlgorithmAna AnaNo ratings yet
- Stem and Leaf Diagrams WorksheetDocument2 pagesStem and Leaf Diagrams WorksheetMaia IbrahimNo ratings yet
- WINSEM2020-21 CSE4019 ETH VL2020210504004 Reference Material I 25-Feb-2021 Spatil Filters - Santhi VDocument10 pagesWINSEM2020-21 CSE4019 ETH VL2020210504004 Reference Material I 25-Feb-2021 Spatil Filters - Santhi Vsatyamoorthy mNo ratings yet
- Additional Homework ProblemsDocument5 pagesAdditional Homework ProblemsSivaMarojuNo ratings yet
- Ahmed Hassan Ismail - BESE-9B - 237897 - NS Lab 5Document15 pagesAhmed Hassan Ismail - BESE-9B - 237897 - NS Lab 5Hasan AhmedNo ratings yet
- MAT09SPWS10055Document2 pagesMAT09SPWS10055Gamer GodNo ratings yet
- Platinum Palladium Printing Edward Stapel Technical Supplement Spring 2011 Making Digital Negatives For Contact PrintingDocument4 pagesPlatinum Palladium Printing Edward Stapel Technical Supplement Spring 2011 Making Digital Negatives For Contact PrintingEdward StapelNo ratings yet
- X and R Charts: Seminar OnDocument17 pagesX and R Charts: Seminar OnDang Anh DuyNo ratings yet
- Iot Fundamentals (Fall Semester:2021-22 Task - 6: Naman Jain 19BEC0234 L57+L58 Biswajit DwivedyDocument9 pagesIot Fundamentals (Fall Semester:2021-22 Task - 6: Naman Jain 19BEC0234 L57+L58 Biswajit DwivedyNaman JainNo ratings yet
- Activity 7 Maath 101 Central Tendency For Gouped DataDocument3 pagesActivity 7 Maath 101 Central Tendency For Gouped DataTzietel Ann FloresNo ratings yet
- And Open CV: Template Matching With PythonDocument18 pagesAnd Open CV: Template Matching With PythonJose BiaforeNo ratings yet
- 09 Graph Decomposition Problems 1Document12 pages09 Graph Decomposition Problems 1Guru Prasad IyerNo ratings yet
- Dïce Borg: A d6 Option For Playing The World's Mörkiest BorgDocument9 pagesDïce Borg: A d6 Option For Playing The World's Mörkiest BorgJoaquin Alonso100% (2)
- Adjacency List Representation: Episode 38: Graphs and Graph TraversalsDocument5 pagesAdjacency List Representation: Episode 38: Graphs and Graph TraversalsravikachhotNo ratings yet
- Introductory Statistics (3-4) : Display & Explore Using R & R CommanderDocument26 pagesIntroductory Statistics (3-4) : Display & Explore Using R & R Commanderv lNo ratings yet
- Exercises in Inferential Statistics: 2 SUMMARIZING DATA (Frequency Distribution)Document2 pagesExercises in Inferential Statistics: 2 SUMMARIZING DATA (Frequency Distribution)manny molinaNo ratings yet
- Tabu SearchDocument11 pagesTabu Searchturgut.zeynepkNo ratings yet
- Qmimet e Blerjes: Column1 Pllaka 1 2Document12 pagesQmimet e Blerjes: Column1 Pllaka 1 2toli00No ratings yet
- Unit Ii Block Ciphers & Public Key Cryptography Topics: Page 1 of 63Document63 pagesUnit Ii Block Ciphers & Public Key Cryptography Topics: Page 1 of 63Lubnaah JaleelNo ratings yet
- Lab 9Document12 pagesLab 9Waleed RazzaqNo ratings yet
- Programming Assignment 3: Paths in GraphsDocument14 pagesProgramming Assignment 3: Paths in GraphsShahid AnsariNo ratings yet
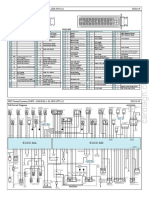
- 2012 Kia Rio EWD - Sistema de Control MFI (G4FD GAMMA 1.6L GDI M T PDFDocument4 pages2012 Kia Rio EWD - Sistema de Control MFI (G4FD GAMMA 1.6L GDI M T PDFCarlos TecnicNo ratings yet
- Design of Robotic Arm & PhotoDocument11 pagesDesign of Robotic Arm & PhotoganeshNo ratings yet
- SYSC3601 1 Microprocessor SystemsDocument8 pagesSYSC3601 1 Microprocessor SystemsAkash AggarwalNo ratings yet
- 28-12-19 SR - Icon All Gtm-5 Code-B Key & Sol'sDocument31 pages28-12-19 SR - Icon All Gtm-5 Code-B Key & Sol'smahesh tNo ratings yet
- Topological Sort: Jhuma Sunuwar, Assistant Professor, Dept. of CSE, SMIT, SMUDocument22 pagesTopological Sort: Jhuma Sunuwar, Assistant Professor, Dept. of CSE, SMIT, SMUTejodeep BoseNo ratings yet
- Catalyst 3560Document36 pagesCatalyst 3560Thiago BoninNo ratings yet
- # Question Type Accuracy: View Player DataDocument24 pages# Question Type Accuracy: View Player DataMaria BelotendosNo ratings yet
- J-403TG 486 Green VLB (V2.0)Document8 pagesJ-403TG 486 Green VLB (V2.0)Ricardo ContieriNo ratings yet
- AI Application Freebook FinalDocument105 pagesAI Application Freebook Finalமது பாபு சத்யம்No ratings yet
- TASC Test Practice Items - MathDocument16 pagesTASC Test Practice Items - Mathশূর্জেন্দু দত্ত-মজুম্দারNo ratings yet
- Page Replacement Algorithms 2Document12 pagesPage Replacement Algorithms 2Ravindra MoteNo ratings yet
- Parallel Distributed Computing Unit-5Document65 pagesParallel Distributed Computing Unit-5sowmya srikandeNo ratings yet
- Lesson 2 AS Acitvity 3 and 4 JABONILLODocument4 pagesLesson 2 AS Acitvity 3 and 4 JABONILLOQueenie ButalidNo ratings yet
- ReportDocument7 pagesReportLekha PylaNo ratings yet
- Solutions: Cardiff University Examination PaperDocument18 pagesSolutions: Cardiff University Examination Papersharon mkdauendaNo ratings yet
- Ah P Decision MethodDocument14 pagesAh P Decision MethodTHƯ CAO HOÀNG MINHNo ratings yet
- 35b7fed366a9d2ea4e828853ec658b73ecaec8c061f0c73633ac4b711dbbda75Document78 pages35b7fed366a9d2ea4e828853ec658b73ecaec8c061f0c73633ac4b711dbbda75BrunoMuniz100% (8)
- Statistical Quality Control: Assignment Answer All The QuestionsDocument1 pageStatistical Quality Control: Assignment Answer All The QuestionsNalin RajapakshaNo ratings yet
- FIFO Chip Design ExampleDocument79 pagesFIFO Chip Design ExampleramachandraNo ratings yet
- Build Point System (D20 House Rules)Document2 pagesBuild Point System (D20 House Rules)Divine_Referee100% (2)
- Activity 3 & 4 Lesson 2 - Queenie - ButalidDocument3 pagesActivity 3 & 4 Lesson 2 - Queenie - ButalidQUEENIE BUTALIDNo ratings yet
- Crystal Legacy by TSPDocument76 pagesCrystal Legacy by TSPhdkray3No ratings yet
- Lecture 2 Complexity Analysis SortingDocument40 pagesLecture 2 Complexity Analysis SortingMahimul Islam AkashNo ratings yet
- Data Transformation ActivityDocument2 pagesData Transformation ActivityteachopensourceNo ratings yet
- Poornima College of Engineering, Jaipur Assignment Unit VDocument1 pagePoornima College of Engineering, Jaipur Assignment Unit VRajkumar JainNo ratings yet
- DS - XS19Q3A.pdf Version 1Document5 pagesDS - XS19Q3A.pdf Version 1Secret SantaNo ratings yet
- 3 in 1 3 en 1 3 em 1 3 合 1 3 в 1 3 w 1 3 v 1 3 az 1-ben 3 în 1 „3 в 1" Kolm ühes 3 vienameDocument2 pages3 in 1 3 en 1 3 em 1 3 合 1 3 в 1 3 w 1 3 v 1 3 az 1-ben 3 în 1 „3 в 1" Kolm ühes 3 vienameHeni PuskasNo ratings yet
- Sat Course3Document72 pagesSat Course3amanNo ratings yet
- Sumproduct Pty Limited: Primary Developer: Liam Bastick General Cover NotesDocument23 pagesSumproduct Pty Limited: Primary Developer: Liam Bastick General Cover NotesPandu PratamaNo ratings yet
- Siamese Network: Shusen WangDocument51 pagesSiamese Network: Shusen WangMInh ThanhNo ratings yet
- Few-Shot Learning: Shusen WangDocument42 pagesFew-Shot Learning: Shusen WangMInh ThanhNo ratings yet
- 2022 Streaming Summit NetflixDocument100 pages2022 Streaming Summit NetflixMInh ThanhNo ratings yet
- 14 Parallel 4Document59 pages14 Parallel 4MInh ThanhNo ratings yet
- Differentiable NAS: Shusen WangDocument42 pagesDifferentiable NAS: Shusen WangMInh ThanhNo ratings yet
- Pretraining and Fine Tuning: Shusen WangDocument41 pagesPretraining and Fine Tuning: Shusen WangMInh ThanhNo ratings yet
- RNN + RL: Shusen WangDocument51 pagesRNN + RL: Shusen WangMInh ThanhNo ratings yet
- Value-Based Reinforcement Learning: Shusen WangDocument53 pagesValue-Based Reinforcement Learning: Shusen WangMInh ThanhNo ratings yet
- Neural Architecture Search: BasicsDocument20 pagesNeural Architecture Search: BasicsMInh ThanhNo ratings yet
- Actor-Critic Methods: Shusen WangDocument35 pagesActor-Critic Methods: Shusen WangMInh ThanhNo ratings yet
- Policy-Based Reinforcement Learning: Shusen WangDocument46 pagesPolicy-Based Reinforcement Learning: Shusen WangMInh ThanhNo ratings yet
- 14 Parallel 1Document51 pages14 Parallel 1MInh ThanhNo ratings yet
- 14 Parallel 3Document56 pages14 Parallel 3MInh ThanhNo ratings yet
- 14 Parallel 2Document28 pages14 Parallel 2MInh ThanhNo ratings yet
- Image Caption: Shusen WangDocument35 pagesImage Caption: Shusen WangMInh ThanhNo ratings yet
- 9 RNN 8Document48 pages9 RNN 8MInh ThanhNo ratings yet
- 9 RNN 9Document34 pages9 RNN 9MInh ThanhNo ratings yet
- Reinforcement Learning Basics: Shusen WangDocument95 pagesReinforcement Learning Basics: Shusen WangMInh ThanhNo ratings yet
- Idirectional Ncoder Epresentations From Ransformers : B E R T BertDocument26 pagesIdirectional Ncoder Epresentations From Ransformers : B E R T BertMInh ThanhNo ratings yet
- 10 Transformer 2Document56 pages10 Transformer 2MInh ThanhNo ratings yet
- Making Rnns More Effective: Shusen WangDocument21 pagesMaking Rnns More Effective: Shusen WangMInh ThanhNo ratings yet
- Data Poisoning Attacks: Shusen WangDocument17 pagesData Poisoning Attacks: Shusen WangMInh ThanhNo ratings yet
- Data Processing Basics: Shusen WangDocument37 pagesData Processing Basics: Shusen WangMInh ThanhNo ratings yet
- Text Generation: Shusen WangDocument49 pagesText Generation: Shusen WangMInh ThanhNo ratings yet
- Long Short Term Memory (LSTM) : Shusen WangDocument26 pagesLong Short Term Memory (LSTM) : Shusen WangMInh ThanhNo ratings yet
- Text Processing and Word Embedding: Shusen WangDocument48 pagesText Processing and Word Embedding: Shusen WangMInh ThanhNo ratings yet
- 10 Transformer 1Document47 pages10 Transformer 1MInh ThanhNo ratings yet
- Neural Machine Translation: Shusen WangDocument57 pagesNeural Machine Translation: Shusen WangMInh ThanhNo ratings yet
- Recurrent Neural Networks (RNNS) : Shusen WangDocument33 pagesRecurrent Neural Networks (RNNS) : Shusen WangMInh ThanhNo ratings yet
- Variational Autoencoder For Image Generation: Shusen WangDocument71 pagesVariational Autoencoder For Image Generation: Shusen WangMInh ThanhNo ratings yet
- Emotional Intelligence CompetencyDocument4 pagesEmotional Intelligence CompetencySiti ShamzelaNo ratings yet
- (M2-MAIN) The Self From Various PerspectivesDocument120 pages(M2-MAIN) The Self From Various PerspectivesAngelo Payod100% (1)
- Marketing Management Course OutlineDocument3 pagesMarketing Management Course OutlineShehryar HumayunNo ratings yet
- Lesson Plan - Contemporary Arts From The PhilippinesDocument4 pagesLesson Plan - Contemporary Arts From The PhilippinesEljay Flores96% (25)
- Community Development: A Critical Approach (Second Edition) : Book ReviewDocument3 pagesCommunity Development: A Critical Approach (Second Edition) : Book ReviewMiko FernandezNo ratings yet
- Biology 9th GradeDocument11 pagesBiology 9th GradeRirinNo ratings yet
- Week 7 Lesson Plans 2Document4 pagesWeek 7 Lesson Plans 2api-334646577No ratings yet
- Fern Smith's Classroom IdeasDocument24 pagesFern Smith's Classroom IdeasSandra Viviana BayonaNo ratings yet
- VONG 1 - 2020-2021 - Key - CTDocument2 pagesVONG 1 - 2020-2021 - Key - CTKhánh LinhNo ratings yet
- YPD Guide Executive Summary PDFDocument2 pagesYPD Guide Executive Summary PDFAlex FarrowNo ratings yet
- Knowledge Is WealthDocument100 pagesKnowledge Is WealthmustaqNo ratings yet
- Henry A. Giroux Teachers As IntellectualsDocument341 pagesHenry A. Giroux Teachers As Intellectualsedgar alirio insuastiNo ratings yet
- Essay About ResponsibilityDocument6 pagesEssay About Responsibilityngisjqaeg100% (2)
- The Implications of The Dodo Bird Verdict For Training in Psychotherapy Prioritizing Process ObservationDocument4 pagesThe Implications of The Dodo Bird Verdict For Training in Psychotherapy Prioritizing Process ObservationSebastian PorcelNo ratings yet
- Communication Technology Definition PDFDocument2 pagesCommunication Technology Definition PDFVictoriaNo ratings yet
- Epidemiology Kept Simple An Introduction To Traditional and Modern Epidemiology 3rd Edition Chapter 1 Epidemiology Past and PresentDocument35 pagesEpidemiology Kept Simple An Introduction To Traditional and Modern Epidemiology 3rd Edition Chapter 1 Epidemiology Past and PresentDeni HerdianaNo ratings yet
- Exam Steps and Process - Read FirstDocument3 pagesExam Steps and Process - Read FirstDeejaay2010No ratings yet
- EBI R310 1 CompatibilityDocument8 pagesEBI R310 1 CompatibilityRødrigø PøpNo ratings yet
- Harvard Divinity School, Cambridge University Press The Harvard Theological ReviewDocument11 pagesHarvard Divinity School, Cambridge University Press The Harvard Theological ReviewLuke HanscomNo ratings yet
- A Natural Approach To Second Language Acquisition PDFDocument14 pagesA Natural Approach To Second Language Acquisition PDFchaitali choudhuryNo ratings yet
- STS Report TopicDocument2 pagesSTS Report TopicJunel SildoNo ratings yet
- Collocation SDocument2 pagesCollocation SpatykcNo ratings yet
- How To Solve A Case StudyDocument2 pagesHow To Solve A Case StudySaYam ReHania100% (1)
- PERFORMANCE TASK NO 1. Workout Plan in SwimmingDocument3 pagesPERFORMANCE TASK NO 1. Workout Plan in SwimmingErika BernardinoNo ratings yet
- MAPEH 9-HEALTH Learning PLANDocument3 pagesMAPEH 9-HEALTH Learning PLANKeren B. VillalunaNo ratings yet
- Penilaian Harian Bersama Semester Gasal Madrasah Tsanawiyah Tahun Pelajaran 2021/2022 MGMP Kkmts & LP Ma'Arif Nu Kabupaten PatiDocument7 pagesPenilaian Harian Bersama Semester Gasal Madrasah Tsanawiyah Tahun Pelajaran 2021/2022 MGMP Kkmts & LP Ma'Arif Nu Kabupaten Patierva safitriNo ratings yet
- 1UR0 4F Que 20201107Document8 pages1UR0 4F Que 20201107Muhammad SaleemNo ratings yet
- Chapter 1 RevisedDocument7 pagesChapter 1 RevisedChristian PalmosNo ratings yet
- Non-Nursing Theories A. Systems TheoryDocument11 pagesNon-Nursing Theories A. Systems Theoryethics wixNo ratings yet