You might also like
- Energy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyFrom EverandEnergy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyChristine JuniorNo ratings yet
- Plug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationDocument14 pagesPlug-In Hybrid Electric Vehicle Control Strategy Parameter OptimizationPrateesh RajNo ratings yet
- Energies: Optimization and Application For Hydraulic Electric Hybrid VehicleDocument17 pagesEnergies: Optimization and Application For Hydraulic Electric Hybrid VehicleSs KalagiNo ratings yet
- Sistema de Propulsión de Un Vehículo Eléctrico Híbrido de Un Solo MotorDocument18 pagesSistema de Propulsión de Un Vehículo Eléctrico Híbrido de Un Solo MotorSantiiGonzalezNo ratings yet
- Regenerative Braking StategyDocument10 pagesRegenerative Braking StategyAshwin SelvakumarNo ratings yet
- Energy-Optimal Control of Plug-In Hybrid Electric Vehicles For Real-World Driving CyclesDocument14 pagesEnergy-Optimal Control of Plug-In Hybrid Electric Vehicles For Real-World Driving CyclesAndreea StefanaNo ratings yet
- Fuzzy Logic Controller For Parallel Plug-In Hybrid VehicleDocument14 pagesFuzzy Logic Controller For Parallel Plug-In Hybrid Vehiclep.coding063No ratings yet
- Control Strategy Development and Optimization For A Series Hydraulic Hybrid VehicleDocument7 pagesControl Strategy Development and Optimization For A Series Hydraulic Hybrid VehicleTri-Vien VuNo ratings yet
- Power Management Strategy for Parallel Hybrid Electric VehiclesDocument6 pagesPower Management Strategy for Parallel Hybrid Electric VehiclesGaurav DeshmukhNo ratings yet
- Dyn Prog ElectricDocument20 pagesDyn Prog ElectricOyungerel BalgansurenNo ratings yet
- Optimal Energy Control Strategy Design For A HybriDocument9 pagesOptimal Energy Control Strategy Design For A HybribhargavNo ratings yet
- Mechanical Engineering and SciencesDocument11 pagesMechanical Engineering and ScienceswarnoiseNo ratings yet
- Electronics 12 02903Document25 pagesElectronics 12 02903quang caoNo ratings yet
- Analysis of Regenerative Braking Strategy for ElecDocument8 pagesAnalysis of Regenerative Braking Strategy for ElecHakimNo ratings yet
- Sname JSR 2020 64 2 171 PDFDocument14 pagesSname JSR 2020 64 2 171 PDFGabriel EduardoNo ratings yet
- Fuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintDocument16 pagesFuzzy Based Ev Charging With Reduced Power Fluctuation Under Renewable Power Consumption ConstraintkesavantNo ratings yet
- Optimal Torque Split Strategy of Dual-Motor ElectrDocument21 pagesOptimal Torque Split Strategy of Dual-Motor Electrquang caoNo ratings yet
- FINALVERSIONDocument12 pagesFINALVERSIONquang caoNo ratings yet
- TKMH và bộ điều khiểnDocument5 pagesTKMH và bộ điều khiển. Bùi Thị Thanh An (QC Executive)No ratings yet
- MPC For Battery Fuel Cell Hybrid VehicleDocument30 pagesMPC For Battery Fuel Cell Hybrid VehicleSab-Win DamadNo ratings yet
- Trade-Offs Between Fuel Economy and Nox Emissions Using Fuzzy Logic Control With A Hybrid CVT ConfigurationDocument13 pagesTrade-Offs Between Fuel Economy and Nox Emissions Using Fuzzy Logic Control With A Hybrid CVT ConfigurationYudha LestariNo ratings yet
- Battery Sizing Analysis for Electric VehiclesDocument6 pagesBattery Sizing Analysis for Electric Vehiclesmihai_1957No ratings yet
- Optimal Operation of A Plug-In Hybrid Vehicle With Battery Thermal and Degradation ModelDocument8 pagesOptimal Operation of A Plug-In Hybrid Vehicle With Battery Thermal and Degradation ModelZain AhmedNo ratings yet
- A MATLAB Simulink Model For Toyota Prius 2004 Based On DOE ReportsDocument9 pagesA MATLAB Simulink Model For Toyota Prius 2004 Based On DOE ReportssifoouNo ratings yet
- Mathematical modelling and simulation of electric vehicleDocument10 pagesMathematical modelling and simulation of electric vehicleZAGAOUCH RedouaneNo ratings yet
- 1 s2.0 S004579062300407X MainDocument20 pages1 s2.0 S004579062300407X Mainerkulrecep01No ratings yet
- Applsci 13 03784 With CoverDocument27 pagesApplsci 13 03784 With CoverSurya AnjuNo ratings yet
- A Dynamic Model For The Performance and Environmental Analysis of An Innovative E-BikeDocument10 pagesA Dynamic Model For The Performance and Environmental Analysis of An Innovative E-BikeGuna SeelanNo ratings yet
- Optimal Design of Power-Split Transmissions For Hydraulic Hybrid Passenger VehiclesDocument6 pagesOptimal Design of Power-Split Transmissions For Hydraulic Hybrid Passenger VehiclesDavid IonutzNo ratings yet
- Modeling and Control of Electric Hybrid Vehicles - 231108 - 121158Document7 pagesModeling and Control of Electric Hybrid Vehicles - 231108 - 121158Nay ThwayNo ratings yet
- Fuel Efficiency Analysis For Simultaneous Optimization of The Velocity Trajectory and The Energy Management in Hybrid Electric Vehicles ?Document6 pagesFuel Efficiency Analysis For Simultaneous Optimization of The Velocity Trajectory and The Energy Management in Hybrid Electric Vehicles ?shivam mauryaNo ratings yet
- Regenerative Braking Control Strategy For Electric Vehicle With Four In-Wheel MotorsDocument6 pagesRegenerative Braking Control Strategy For Electric Vehicle With Four In-Wheel MotorsMarcel BabiiNo ratings yet
- The Influence of Number and Values of Ratios in STDocument11 pagesThe Influence of Number and Values of Ratios in STIsmah ParmigianiNo ratings yet
- Energy Management Strategy For A PHEVDocument6 pagesEnergy Management Strategy For A PHEVVignesh HegdeNo ratings yet
- Energies: Energy Management Strategies For Hybrid Electric Vehicles: Review, Classification, Comparison, and OutlookDocument36 pagesEnergies: Energy Management Strategies For Hybrid Electric Vehicles: Review, Classification, Comparison, and OutlooksadaNo ratings yet
- Optimal Selection of Motor and Gearhead in Mechatronic ApplicationsDocument10 pagesOptimal Selection of Motor and Gearhead in Mechatronic ApplicationsMohanraj SelvakumarNo ratings yet
- Optimal Design of A Hybrid Hydromechanical Transmission For A Reach StackerDocument11 pagesOptimal Design of A Hybrid Hydromechanical Transmission For A Reach StackerSebastian AlmagroNo ratings yet
- Analysis of a Hybrid Turbocharger for Improving IC Engine PerformanceDocument9 pagesAnalysis of a Hybrid Turbocharger for Improving IC Engine PerformancezahidNo ratings yet
- 3 RefDocument16 pages3 RefWesley Jeevadason (RA1913005011014)No ratings yet
- Automotive Engine Hybrid Modelling and Control For Reduction of Hydrocarbon EmissionsDocument16 pagesAutomotive Engine Hybrid Modelling and Control For Reduction of Hydrocarbon EmissionsdraggonboyNo ratings yet
- 1 s2.0 S1876610212014634 MainDocument10 pages1 s2.0 S1876610212014634 Main129tonyegNo ratings yet
- Optimal Control Strategies for a Series Hydraulic Hybrid VehicleDocument7 pagesOptimal Control Strategies for a Series Hydraulic Hybrid VehicleTri-Vien VuNo ratings yet
- 25 Ijmtst0711068Document9 pages25 Ijmtst0711068guruvigneshnzNo ratings yet
- 1 s2.0 S1876610214028227 MainDocument6 pages1 s2.0 S1876610214028227 MainsamsNo ratings yet
- El 30 4 11Document9 pagesEl 30 4 11daaanuNo ratings yet
- A Single-Degree-Of-Freedom Energy Optimization STRDocument23 pagesA Single-Degree-Of-Freedom Energy Optimization STRtalha.sfuNo ratings yet
- Designing Energy Efficient Traction Machines For Electric and Hybrid VehiclesDocument9 pagesDesigning Energy Efficient Traction Machines For Electric and Hybrid VehicleskodeegNo ratings yet
- Power Management Strategy For A Parallel Hybrid Electric TruckDocument15 pagesPower Management Strategy For A Parallel Hybrid Electric Truckniranjan vNo ratings yet
- Mesh Generation and Energy Group Condensation Studies For The Jaguar Deterministic Transport CodeDocument15 pagesMesh Generation and Energy Group Condensation Studies For The Jaguar Deterministic Transport Codewatsona4No ratings yet
- Comparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric VehicleDocument6 pagesComparison of Early-Stage Design Methods For A Two-Mode Hybrid Electric Vehiclejin11004No ratings yet
- Study and Analysis of Nonlinear Constrained Components A Study of Plug-In Hybrid Electric VehicleDocument4 pagesStudy and Analysis of Nonlinear Constrained Components A Study of Plug-In Hybrid Electric VehicleEditor IJTSRDNo ratings yet
- EV Impact on Power Demand and CostsDocument15 pagesEV Impact on Power Demand and CostsChino PlagaNo ratings yet
- SM2204Document15 pagesSM2204Tarun GeetarNo ratings yet
- Energy Management Strategy For A Hybrid Electric VehicleDocument10 pagesEnergy Management Strategy For A Hybrid Electric VehicleJuan Pablo Chamorro AguadoNo ratings yet
- Application of Genetic Algorithm For Optimization of Control Strategy in Parallel Hybrid Electric VehiclesDocument16 pagesApplication of Genetic Algorithm For Optimization of Control Strategy in Parallel Hybrid Electric VehiclesHuynh Quoc VietNo ratings yet
- The Usage of Supercapacitors For Energy Storage Systems in The DC-Link of Machine ToolsDocument6 pagesThe Usage of Supercapacitors For Energy Storage Systems in The DC-Link of Machine ToolsEdu Daryl MacerenNo ratings yet
- Energy Saving SRPDocument13 pagesEnergy Saving SRPJose ContrerasNo ratings yet
- Chassis Dynamometer For Electric Two WheelersDocument5 pagesChassis Dynamometer For Electric Two Wheelersdani chNo ratings yet
- 1 s2.0 S0888327018303728 MainDocument16 pages1 s2.0 S0888327018303728 MainKhaldi abdelhakimNo ratings yet
- Model predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage systemDocument9 pagesModel predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage systemChandresh TripathiNo ratings yet
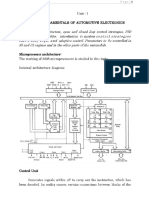
- Unit EHVDocument23 pagesUnit EHVPavan PNo ratings yet
- An Investigation Into The Induction Motor of Tesla Model S VehicleDocument7 pagesAn Investigation Into The Induction Motor of Tesla Model S VehiclePavan PNo ratings yet
- At6701 Evm IqDocument1 pageAt6701 Evm IqPavan PNo ratings yet
- Resistive Force Calculation and Battery Pack Configuration Using Simulink ModelDocument7 pagesResistive Force Calculation and Battery Pack Configuration Using Simulink ModelPavan PNo ratings yet
- Energy Policies For Sustainable DevelopmentDocument38 pagesEnergy Policies For Sustainable DevelopmentAbhishek kumarNo ratings yet
- Design of The Chevrolet Bolt EV Propulsion SystemDocument8 pagesDesign of The Chevrolet Bolt EV Propulsion SystemPavan PNo ratings yet
- High Performance Motor and Inverter System For A Hybrid VehicleDocument6 pagesHigh Performance Motor and Inverter System For A Hybrid VehiclePavan PNo ratings yet
- AT17602 - Electric and Hybrid Vehicles Part - A Unit 1Document10 pagesAT17602 - Electric and Hybrid Vehicles Part - A Unit 1Pavan PNo ratings yet
- EHV - II SyllabusDocument2 pagesEHV - II SyllabusPavan PNo ratings yet
- Unit 2 OAT1903Document29 pagesUnit 2 OAT1903Pavan PNo ratings yet
- A Guide To Picking A Quality Energy AuditorDocument8 pagesA Guide To Picking A Quality Energy AuditorJoe AdehshinaNo ratings yet
- Accelerating Building DecarbonizationDocument84 pagesAccelerating Building DecarbonizationAbeera Malik100% (1)
- Installation Operation Manual: Growatt 2500MTL-S Growatt 3000MTL-S Growatt 3600MTL-S S S SDocument32 pagesInstallation Operation Manual: Growatt 2500MTL-S Growatt 3000MTL-S Growatt 3600MTL-S S S SUpsol IntNo ratings yet
- 30 Nov. Tesla 4680 Batteries Will Be The End of Solid State BatteryDocument8 pages30 Nov. Tesla 4680 Batteries Will Be The End of Solid State BatteryAndrewson BautistaNo ratings yet
- H2@Scale New Markets FOA 2229 - Mod 0002Document120 pagesH2@Scale New Markets FOA 2229 - Mod 0002Bikram Basu RoychowdhuryNo ratings yet
- 01 - Equipment Cabinet ICC330-H7-C1 Datasheet 01 - (20170613)Document2 pages01 - Equipment Cabinet ICC330-H7-C1 Datasheet 01 - (20170613)alexdaniel666100% (1)
- Schneider Electric - EM72xx - 30002055Document4 pagesSchneider Electric - EM72xx - 30002055Alex PereiraNo ratings yet
- Equipment ListDocument6 pagesEquipment ListankitNo ratings yet
- Overview:: Case StudyDocument2 pagesOverview:: Case StudyGowtham SrinivaasNo ratings yet
- Aqua Blue Freshwater Generator Mdd00056enDocument4 pagesAqua Blue Freshwater Generator Mdd00056enMuhd Khir RazaniNo ratings yet
- WEG - Regulador Automático de Tensión - AVR-A-OPT-06 - Portugués, Inglés y EspañolDocument78 pagesWEG - Regulador Automático de Tensión - AVR-A-OPT-06 - Portugués, Inglés y EspañolFernando GraziadioNo ratings yet
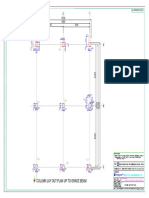
- Column Lay Out Plan Up To Grade Beam: EnergypacDocument6 pagesColumn Lay Out Plan Up To Grade Beam: EnergypacDesign explorer olomizanaNo ratings yet
- Elektronika Daya (Kuliah)Document37 pagesElektronika Daya (Kuliah)Hajrul Jhonn RamboNo ratings yet
- 06 PLN Testing of GT With Biodiesel and Ppo 3 PDFDocument39 pages06 PLN Testing of GT With Biodiesel and Ppo 3 PDFJuan ZamoraNo ratings yet
- Energy Harvesting for Wearable Devices: A ReviewDocument16 pagesEnergy Harvesting for Wearable Devices: A ReviewLaura PrietoNo ratings yet
- Cummins SuvastuDocument4 pagesCummins SuvastuMD Riazul Islam MirajNo ratings yet
- Review Electric Drive 2012Document10 pagesReview Electric Drive 2012dinhquangcdtbkNo ratings yet
- World Greenhouse Gas Emissions Sankey Chart 2019 - 0 PDFDocument1 pageWorld Greenhouse Gas Emissions Sankey Chart 2019 - 0 PDFfelitoNo ratings yet
- Standby Power Supply Battery Life ExpectancyDocument2 pagesStandby Power Supply Battery Life ExpectancyqinayabeeNo ratings yet
- My Presentation On Thermal Power PlantDocument29 pagesMy Presentation On Thermal Power PlantGopal GuptaNo ratings yet
- Alireza JavanshirDocument26 pagesAlireza JavanshirLekane nelsonNo ratings yet
- SFOC Optimization Methods - For MAN B&W Two-Stroke IMO Tier II EnginesDocument16 pagesSFOC Optimization Methods - For MAN B&W Two-Stroke IMO Tier II EnginesTimmyJuriNo ratings yet
- Siemens Organization Structure: Business CompaniesDocument1 pageSiemens Organization Structure: Business CompaniesSanapala Mohan VamsiNo ratings yet
- Abb Acs2000Document204 pagesAbb Acs2000gadgil_vikrant57% (7)
- Sougou e 201806 Catalog InverterDocument24 pagesSougou e 201806 Catalog InverterBui Quoc HungNo ratings yet
- 6th Grade Science Curr Map 2014-152Document18 pages6th Grade Science Curr Map 2014-152api-257662459No ratings yet
- Marine Engines: Customer BenefitsDocument3 pagesMarine Engines: Customer BenefitsAlbertoNo ratings yet
- Service Equipment and Supplies: Parts For Your 3412 Marine EngineDocument1 pageService Equipment and Supplies: Parts For Your 3412 Marine EngineAlexis SanchezNo ratings yet
- TCLDocument198 pagesTCLVaisakVenugopal100% (1)
- Epsonvs 43 ADocument15 pagesEpsonvs 43 AInna C HernándezNo ratings yet