You might also like
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Adaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethDocument7 pagesAdaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethIJERDNo ratings yet
- LMS and RLS Based Adaptive Filter Design For Different SignalsDocument5 pagesLMS and RLS Based Adaptive Filter Design For Different SignalsijeteeditorNo ratings yet
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- Matlab Simulation of Cordic Based Adaptive Filtering For Noise Reduction Using Sensors ArrayDocument6 pagesMatlab Simulation of Cordic Based Adaptive Filtering For Noise Reduction Using Sensors ArrayMohamed GanounNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Performance Analysis of LMS & NLMS Algorithms For Noise CancellationDocument4 pagesPerformance Analysis of LMS & NLMS Algorithms For Noise CancellationijsretNo ratings yet
- Digital Spectral Analysis MATLAB® Software User GuideFrom EverandDigital Spectral Analysis MATLAB® Software User GuideNo ratings yet
- The Applications and Simulation of Adaptive Filter in Speech EnhancementDocument7 pagesThe Applications and Simulation of Adaptive Filter in Speech EnhancementAli KashiNo ratings yet
- FPGA Implementation of Adaptive Filtering Algorithms For Noise Cancellation-A Technical SurveyDocument10 pagesFPGA Implementation of Adaptive Filtering Algorithms For Noise Cancellation-A Technical SurveyJabran SafdarNo ratings yet
- Variable StageCascadedAdaptiveDocument35 pagesVariable StageCascadedAdaptiveAkilesh MDNo ratings yet
- European Journal Article on Improved LMS AlgorithmDocument5 pagesEuropean Journal Article on Improved LMS AlgorithmBENZIANE MouradNo ratings yet
- Version 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering AlgorithmsDocument7 pagesVersion 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering Algorithmstayyabkhan00No ratings yet
- Echo Cancellation Algorithms Using Adaptive Filters: A Comparative StudyDocument8 pagesEcho Cancellation Algorithms Using Adaptive Filters: A Comparative StudyidescitationNo ratings yet
- What Is Adaptive Signal ProcessingDocument16 pagesWhat Is Adaptive Signal Processingderresesolomon36No ratings yet
- FPGA Implementation of Noise Cancellation Using RLS Adaptive FilterDocument8 pagesFPGA Implementation of Noise Cancellation Using RLS Adaptive FilterLuis Oliveira SilvaNo ratings yet
- Hardware Implementation of Speech Enhancement AlgorithmsDocument3 pagesHardware Implementation of Speech Enhancement AlgorithmsijsretNo ratings yet
- Battle Field Speech Enhancement Using An Efficient Unbiased Adaptive Filtering TechniqueDocument5 pagesBattle Field Speech Enhancement Using An Efficient Unbiased Adaptive Filtering Techniqueeditor9891No ratings yet
- Adaptive Digital FiltersDocument10 pagesAdaptive Digital Filtersfantastic05No ratings yet
- Efficient Very Large-Scale Integration Architecture Design of Proportionate-Type Least Mean Square Adaptive FiltersDocument7 pagesEfficient Very Large-Scale Integration Architecture Design of Proportionate-Type Least Mean Square Adaptive FiltersIJRES teamNo ratings yet
- Applications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezDocument19 pagesApplications of Adaptive Filtering: J. Gerardo Avalos, Juan C. Sanchez and Jose VelazquezguyoaserNo ratings yet
- Adaptive Filters ExplainedDocument2 pagesAdaptive Filters ExplainedAkinoTenshiNo ratings yet
- Springer 1Document7 pagesSpringer 1Dimple BansalNo ratings yet
- Noise Cancellation Using Sign-Data LMS AlgorithmDocument6 pagesNoise Cancellation Using Sign-Data LMS AlgorithmMarcelo VilcaNo ratings yet
- Adaptive Filter Analysis Using AlgorithmsDocument7 pagesAdaptive Filter Analysis Using AlgorithmsgantayatNo ratings yet
- Labview Fpga Based Noise Cancelling Using The Lms Adaptive AlgorithmDocument4 pagesLabview Fpga Based Noise Cancelling Using The Lms Adaptive AlgorithmGoran MiljkovicNo ratings yet
- Adaptive Filter DesignDocument5 pagesAdaptive Filter DesignHariNathNo ratings yet
- Split Wiener Filtering With Application in Adaptive SystemsDocument9 pagesSplit Wiener Filtering With Application in Adaptive SystemsAYUSH KUMAR CHOWDHURYNo ratings yet
- A Review of Active Noise Control AlgorithmsDocument5 pagesA Review of Active Noise Control AlgorithmsPiper OntuNo ratings yet
- OFDM De-Noising With RLS Adaptive FilterDocument5 pagesOFDM De-Noising With RLS Adaptive FilterfikusNo ratings yet
- HDL AdaptativeDocument4 pagesHDL AdaptativeabedoubariNo ratings yet
- All Adaptive Filter AlgorithmsDocument9 pagesAll Adaptive Filter AlgorithmsAkilesh MDNo ratings yet
- Variable Leaky LMSDocument4 pagesVariable Leaky LMSAkilesh MDNo ratings yet
- NIThDocument5 pagesNITh21bec091AnandMohanAryaNo ratings yet
- Fast Exact Adaptive Algorithms For Feedforward Active Noise ControlDocument25 pagesFast Exact Adaptive Algorithms For Feedforward Active Noise ControlAnuroop G RaoNo ratings yet
- Echo Cancellation Using LMS AlgorithmDocument5 pagesEcho Cancellation Using LMS AlgorithmPrabira Kumar SethyNo ratings yet
- Design and Implementation of Real Time Electronic Stethoscope With A Method For Separating Heart Sound From Lung Sound Using TMS320C6713 DSKDocument12 pagesDesign and Implementation of Real Time Electronic Stethoscope With A Method For Separating Heart Sound From Lung Sound Using TMS320C6713 DSKrajkumarpaniNo ratings yet
- Sipij 040304Document12 pagesSipij 040304sipijNo ratings yet
- Detection and Cancellation of Jamming Signal Noise Using Digital Filters For Radar Applications Ch. KusmakumariDocument6 pagesDetection and Cancellation of Jamming Signal Noise Using Digital Filters For Radar Applications Ch. Kusmakumariarmando ibarraNo ratings yet
- Echo Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoDocument25 pagesEcho Cancellation Using Adaptive Filtering: by Thanis Tridhavee and Steve VucoÈmøñ AlesandЯo KhanNo ratings yet
- SYSC5603 Project Report: Real-Time Acoustic Echo CancellationDocument15 pagesSYSC5603 Project Report: Real-Time Acoustic Echo CancellationqasimalikNo ratings yet
- LMS ALGORITHM: A SIMPLE YET EFFECTIVE ADAPTIVE FILTERING TECHNIQUEDocument14 pagesLMS ALGORITHM: A SIMPLE YET EFFECTIVE ADAPTIVE FILTERING TECHNIQUEjaigodaraNo ratings yet
- A Low Frequency Noise Cancellation Vlsi Circuit Design Using Lms Adaptive Filter For In-Ear Headphones.Document7 pagesA Low Frequency Noise Cancellation Vlsi Circuit Design Using Lms Adaptive Filter For In-Ear Headphones.ijire publicationNo ratings yet
- Rakesh Kumar Kardam: - Filter H (T) Y (T) S (T) +N (T)Document6 pagesRakesh Kumar Kardam: - Filter H (T) Y (T) S (T) +N (T)Deepak SankhalaNo ratings yet
- Echo Cancellation Using The Lms AlgorithmDocument8 pagesEcho Cancellation Using The Lms AlgorithmVương Công ĐịnhNo ratings yet
- Active Noise Reduction Using LMS and FXLMS AlgoritDocument12 pagesActive Noise Reduction Using LMS and FXLMS AlgoritSahitya YadavNo ratings yet
- Fpga Implementation of Adaptive Weight PDFDocument7 pagesFpga Implementation of Adaptive Weight PDFiaetsdiaetsdNo ratings yet
- Active Noise Cancellation Using Adaptive Filter Algorithms IJERTV7IS020020Document5 pagesActive Noise Cancellation Using Adaptive Filter Algorithms IJERTV7IS020020Vishnu PriyaNo ratings yet
- BhgyuiDocument5 pagesBhgyuiRup JoshiNo ratings yet
- Multirate Filters and Wavelets: From Theory To ImplementationDocument22 pagesMultirate Filters and Wavelets: From Theory To ImplementationAnsari RehanNo ratings yet
- Acoustic Echo Cancellation With Adaptive Filtering Using Texas Instrument DSK6713Document11 pagesAcoustic Echo Cancellation With Adaptive Filtering Using Texas Instrument DSK6713IJRASETPublicationsNo ratings yet
- Anexo 2 - Plantilla IEEEDocument7 pagesAnexo 2 - Plantilla IEEEeduar Martelo SierraNo ratings yet
- Hardware Implementation of Adaptive System Identification: Kusha TyagiDocument4 pagesHardware Implementation of Adaptive System Identification: Kusha TyagierpublicationNo ratings yet
- Echo Cancellation in Audio Signal Using LMS AlgorithmDocument6 pagesEcho Cancellation in Audio Signal Using LMS AlgorithmVa SuNo ratings yet
- An Introduction Adaptive Filter: Review By: Dhendy Zaki RDocument9 pagesAn Introduction Adaptive Filter: Review By: Dhendy Zaki RZola ZumiNo ratings yet
- An Efficient Adaptive Fir Filter Based On Distributed ArithmeticDocument6 pagesAn Efficient Adaptive Fir Filter Based On Distributed ArithmeticinventionjournalsNo ratings yet
- 0010 Praes AECDocument5 pages0010 Praes AECPradeep Poduval K PNo ratings yet
- ANC System For Noisy SpeechDocument9 pagesANC System For Noisy SpeechsipijNo ratings yet
- Design and Implementation of Adaptive Filtering Algorithm For Noise Cancellation of Speech Signal On Fpga For Hearing AidDocument27 pagesDesign and Implementation of Adaptive Filtering Algorithm For Noise Cancellation of Speech Signal On Fpga For Hearing AidVaisakh SugathanNo ratings yet
- Simulink Implementation of RLS AlgorithmDocument14 pagesSimulink Implementation of RLS AlgorithmAkilesh MDNo ratings yet
- Variable StageCascadedAdaptiveDocument35 pagesVariable StageCascadedAdaptiveAkilesh MDNo ratings yet
- Systolic 1Document4 pagesSystolic 1Akilesh MDNo ratings yet
- Variable Leaky LMSDocument4 pagesVariable Leaky LMSAkilesh MDNo ratings yet
- Robust Variable-Regularized Rls AlgorithmsDocument5 pagesRobust Variable-Regularized Rls AlgorithmsMourad BenzianeNo ratings yet
- A New Diffusion Variable Spatial Regularized QRRLS AlgorithmDocument5 pagesA New Diffusion Variable Spatial Regularized QRRLS AlgorithmAkilesh MDNo ratings yet
- A Delay Relaxed RLS-DCD Algorithm For Real-Time ImplementationDocument5 pagesA Delay Relaxed RLS-DCD Algorithm For Real-Time ImplementationAkilesh MDNo ratings yet
- Russian Peasant Multiplierwith Sklansky and Carlson AddersDocument21 pagesRussian Peasant Multiplierwith Sklansky and Carlson AddersAkilesh MDNo ratings yet
- Optimization of Rls Adaptive Filter ArchitectureDocument5 pagesOptimization of Rls Adaptive Filter ArchitectureAkilesh MDNo ratings yet
- Fast and Robust Variable-Step-Size LMS AlgorithmDocument5 pagesFast and Robust Variable-Step-Size LMS AlgorithmAkilesh MDNo ratings yet
- Recursive Least-Squares Adaptive Filters: Dr. Yogananda IsukapalliDocument28 pagesRecursive Least-Squares Adaptive Filters: Dr. Yogananda IsukapalliAkilesh MDNo ratings yet
- Ocular Artifact Elimination From EEG Signal Using RVFF RLSDocument6 pagesOcular Artifact Elimination From EEG Signal Using RVFF RLSAkilesh MDNo ratings yet
- Muscle Noise Cancellation from ECG Using Self Correcting Leaky NLMS FilterDocument8 pagesMuscle Noise Cancellation from ECG Using Self Correcting Leaky NLMS FilterAkilesh MDNo ratings yet
- Mov Fxlms 2022Document5 pagesMov Fxlms 2022Akilesh MDNo ratings yet
- Improved Complete Ensemble Empirical Mode Decomposition Using JAYA HYBRIDDocument11 pagesImproved Complete Ensemble Empirical Mode Decomposition Using JAYA HYBRIDAkilesh MDNo ratings yet
- Combining Parallel Adaptive Filtering and Wavelet ThresholdDocument9 pagesCombining Parallel Adaptive Filtering and Wavelet ThresholdAkilesh MDNo ratings yet
- 07050465Document6 pages07050465马宗宇No ratings yet
- A Variable Leaky LMS Adaptive AlgorithmDocument4 pagesA Variable Leaky LMS Adaptive AlgorithmAkilesh MDNo ratings yet
- Design and Implementation of FIR Filter Architecture Using High Level Transformation TechniquesDocument5 pagesDesign and Implementation of FIR Filter Architecture Using High Level Transformation TechniquesAkilesh MDNo ratings yet
- All Adaptive Filter AlgorithmsDocument9 pagesAll Adaptive Filter AlgorithmsAkilesh MDNo ratings yet
- Multi-stage kernel filtering for ECG noiseDocument19 pagesMulti-stage kernel filtering for ECG noiseAkilesh MDNo ratings yet
- A Robust RLS Implementation of The ANC BlockDocument5 pagesA Robust RLS Implementation of The ANC BlockAkilesh MDNo ratings yet
- A Pipelined Reduced ComplexityDocument13 pagesA Pipelined Reduced ComplexityAkilesh MDNo ratings yet
- Maths RevisionDocument8 pagesMaths RevisionblessingNo ratings yet
- Cell-Free Massive MIMO Versus Small Cells1Document17 pagesCell-Free Massive MIMO Versus Small Cells1Surya Shekhar singh sssNo ratings yet
- Modeling and Simulation of 1.5MW Wind TurbineDocument3 pagesModeling and Simulation of 1.5MW Wind TurbineInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- College Essay - Anzo TehDocument2 pagesCollege Essay - Anzo TehElevenPlus ParentsNo ratings yet
- Study of Supersonic Flow in A Constant Rate of Momentum Change PDFDocument11 pagesStudy of Supersonic Flow in A Constant Rate of Momentum Change PDFVirendra KumarNo ratings yet
- Geometry Transformation Guided Notes 1Document18 pagesGeometry Transformation Guided Notes 1api-287816312100% (1)
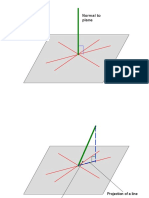
- Projecting Lines & Calculating Angles Between Planes & DiagonalsDocument8 pagesProjecting Lines & Calculating Angles Between Planes & DiagonalsDewan Olin ChotepadaeNo ratings yet
- GE3151 Problem Solving and Python Programming Lecture Notes 2Document158 pagesGE3151 Problem Solving and Python Programming Lecture Notes 2nandhini.raj2930No ratings yet
- Mechanical Engineering - Final PDFDocument248 pagesMechanical Engineering - Final PDFRubal SharmaNo ratings yet
- 07 01ChapGere PDFDocument14 pages07 01ChapGere PDFAfoldoNo ratings yet
- Argument From Antecedent ProbabilityDocument7 pagesArgument From Antecedent ProbabilityDaphne DalogNo ratings yet
- Topic 1: Conic Sections Subtopic: 1.1 Introduction To Conic Sections 1.2 Circles Learning OutcomesDocument35 pagesTopic 1: Conic Sections Subtopic: 1.1 Introduction To Conic Sections 1.2 Circles Learning OutcomesAravind Ravi100% (1)
- Lecture Rough SetsDocument31 pagesLecture Rough SetsMohamed mohamedNo ratings yet
- Generative Adversarial NetworksDocument14 pagesGenerative Adversarial NetworksHarshit BhardwajNo ratings yet
- Parallel Lines Theorems NOTESDocument2 pagesParallel Lines Theorems NOTESAmy SchillNo ratings yet
- Chapter One Getting Started in Matlab: By: Amare KassawDocument23 pagesChapter One Getting Started in Matlab: By: Amare KassawTesfahun GirmaNo ratings yet
- Discrete-Time Signal Processing exam questionsDocument3 pagesDiscrete-Time Signal Processing exam questionsManimegalaiNo ratings yet
- Chapter 5 - Partial DerivativesDocument23 pagesChapter 5 - Partial Derivativesdbreddy287No ratings yet
- Tech Paper - Dynamic Analysis of Rotary MachineDocument11 pagesTech Paper - Dynamic Analysis of Rotary MachineSid ShendgeNo ratings yet
- Visual Vocabulary of Financial TimesDocument1 pageVisual Vocabulary of Financial TimesGiovanni RabuffettiNo ratings yet
- Liquidity, Asset Utilization, Debt Ratio and Firm Performance: Evidence From EgyptDocument32 pagesLiquidity, Asset Utilization, Debt Ratio and Firm Performance: Evidence From EgyptMsa-Management Sciences JournalNo ratings yet
- Athila Assignment 1 Sta560Document2 pagesAthila Assignment 1 Sta560Dyla AzlanNo ratings yet
- Expt-5 Lab Manual TE LabDocument10 pagesExpt-5 Lab Manual TE LabRuham RofiqueNo ratings yet
- Heavy Equipment Operator Training GuideDocument74 pagesHeavy Equipment Operator Training GuideAngee PotNo ratings yet
- Broad Band Bow Tie AntennaDocument101 pagesBroad Band Bow Tie Antennafreon1999No ratings yet
- Laplace and Poissons EquationDocument22 pagesLaplace and Poissons EquationGowrishankar JayapalanNo ratings yet
- Mathematical ProblemsDocument12 pagesMathematical ProblemsMorakinyo Douglas ElijahNo ratings yet
- Whitepaper Laser-Tracker Hydro Jan09Document7 pagesWhitepaper Laser-Tracker Hydro Jan09Sagar PatkiNo ratings yet
- Water MarkingDocument24 pagesWater Markinghamed razaNo ratings yet
- A Model Predictive Control For Renewable Energy Based AC Microgrids Without Any PID RegulatorsDocument5 pagesA Model Predictive Control For Renewable Energy Based AC Microgrids Without Any PID RegulatorsSajid Mohy Ul DinNo ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Designing and Building Security Operations CenterFrom EverandDesigning and Building Security Operations CenterRating: 3 out of 5 stars3/5 (3)
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)From EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)No ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsNo ratings yet
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationFrom EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNo ratings yet
- AWS Certified Advanced Networking - Specialty Exam Guide: Build your knowledge and technical expertise as an AWS-certified networking specialistFrom EverandAWS Certified Advanced Networking - Specialty Exam Guide: Build your knowledge and technical expertise as an AWS-certified networking specialistNo ratings yet
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)