You might also like
- Energy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyFrom EverandEnergy and Thermal Management, Air-Conditioning, and Waste Heat Utilization: 2nd ETA Conference, November 22-23, 2018, Berlin, GermanyChristine JuniorNo ratings yet
- Analysis of Temperature Characteristics of High-SpDocument17 pagesAnalysis of Temperature Characteristics of High-SpIrfani Dwi ArifiantoNo ratings yet
- Adaptive Cooling and Spindle Condition Monitoring System: Guided By: Dr. B. Giriraj R. No. 07MI31Document28 pagesAdaptive Cooling and Spindle Condition Monitoring System: Guided By: Dr. B. Giriraj R. No. 07MI31arunnicalNo ratings yet
- v1 CoveredDocument20 pagesv1 CoveredIsac MartinsNo ratings yet
- Thermal State Calculation of Chamber in Small Thrust Liquid Rocket Engine For Steady State Pulsed ModeDocument10 pagesThermal State Calculation of Chamber in Small Thrust Liquid Rocket Engine For Steady State Pulsed ModeHammad HaseebNo ratings yet
- Huang 2006Document15 pagesHuang 2006Alexis Navarro RuizNo ratings yet
- Experimentally Validated Numerical Model of Thermal and Flow Processes Within The Permanent Magnet Brushless Direct Current MotorDocument10 pagesExperimentally Validated Numerical Model of Thermal and Flow Processes Within The Permanent Magnet Brushless Direct Current Motorfong jeffNo ratings yet
- Design and Thermal Characteristic Analysis of Motorized Spindle Cooling SystemDocument14 pagesDesign and Thermal Characteristic Analysis of Motorized Spindle Cooling Systemfujy fujyNo ratings yet
- Thermal Modelling of Induction MachinesDocument7 pagesThermal Modelling of Induction MachinesRohan ChandrashekarNo ratings yet
- A Coupled 1D-3D Numerical Method For Buoyancy-Driven Heat Transfer in A Generic Engine BayDocument19 pagesA Coupled 1D-3D Numerical Method For Buoyancy-Driven Heat Transfer in A Generic Engine Baymarcin.ziolkowski.55No ratings yet
- Sciencedirect: Optimization of High Speed Machine Tool Spindle To Minimize Thermal DistortionDocument6 pagesSciencedirect: Optimization of High Speed Machine Tool Spindle To Minimize Thermal DistortionGilberto ZencovNo ratings yet
- 1 s2.0 S2214157X1830128X Main PDFDocument13 pages1 s2.0 S2214157X1830128X Main PDFDonny SetyaNo ratings yet
- Case Studies in Thermal Engineering: C.Q. Su, W.S. Wang, X. Liu, Y.D. DengDocument7 pagesCase Studies in Thermal Engineering: C.Q. Su, W.S. Wang, X. Liu, Y.D. DengAbhishek jNo ratings yet
- Control Engineering Practice: Yao Jia, Tianyou Chai, Hong Wang, Chun-Yi SuDocument11 pagesControl Engineering Practice: Yao Jia, Tianyou Chai, Hong Wang, Chun-Yi SuharoldNo ratings yet
- Numerical Simulation On Fluid Flow and Temperature Prediction of Motorcycles Based On CFDDocument21 pagesNumerical Simulation On Fluid Flow and Temperature Prediction of Motorcycles Based On CFDDede Satria Maulana NatakusumahNo ratings yet
- Coupled CFD FE analysis for the exhaust manifold to reduce stress of a direct injection-diesel engineDocument7 pagesCoupled CFD FE analysis for the exhaust manifold to reduce stress of a direct injection-diesel engineBhawesh SthaNo ratings yet
- Applied SciencesDocument14 pagesApplied SciencesflNo ratings yet
- Chandak 2015 IOP Conf. Ser. Mater. Sci. Eng. 88 012033Document9 pagesChandak 2015 IOP Conf. Ser. Mater. Sci. Eng. 88 012033luis900000No ratings yet
- Turbo 136 01 011001 PDFDocument13 pagesTurbo 136 01 011001 PDFtazNo ratings yet
- Sensitivity Analysis On Turbine Blade Temperature Distribution Using Conjugate Heat Transfer SimulationDocument13 pagesSensitivity Analysis On Turbine Blade Temperature Distribution Using Conjugate Heat Transfer SimulationtazNo ratings yet
- Thermal Modelling of Induction Machine Using The Lumped Parameter ModelDocument1 pageThermal Modelling of Induction Machine Using The Lumped Parameter ModelJovelyn Clair L. RosarioNo ratings yet
- Influence of Traction Motor Components On ThermalDocument14 pagesInfluence of Traction Motor Components On Thermalerode els erodeNo ratings yet
- Choi2020 Article EnhancedEfficiencyOfTheBrushleDocument7 pagesChoi2020 Article EnhancedEfficiencyOfTheBrushleJohn XaviNo ratings yet
- Impact of Ball-Screw Pre-loading on Thermal Behavior Simulation of VMC Feed Drive SystemDocument8 pagesImpact of Ball-Screw Pre-loading on Thermal Behavior Simulation of VMC Feed Drive Systemdhans20051No ratings yet
- 1 s2.0 S2214157X21008492 MainDocument13 pages1 s2.0 S2214157X21008492 MainChristina Christina ChristinaNo ratings yet
- Energies 09 00320Document14 pagesEnergies 09 00320jorlinNo ratings yet
- Model-Based Analysis and Simulation of Regenerative Heat WheelDocument13 pagesModel-Based Analysis and Simulation of Regenerative Heat Wheeladarsh_mrNo ratings yet
- Thermal Analysis and Compensation of A Double Column Machining CentreDocument9 pagesThermal Analysis and Compensation of A Double Column Machining CentreShamanth CNo ratings yet
- International Communications in Heat and Mass Transfer: Sheng-Chung Tzeng, Tzer-Ming Jeng, Yi-Liang LinDocument9 pagesInternational Communications in Heat and Mass Transfer: Sheng-Chung Tzeng, Tzer-Ming Jeng, Yi-Liang Linvijay2293No ratings yet
- 2018 Book CFDTechniquesAndThermo-MechaniDocument208 pages2018 Book CFDTechniquesAndThermo-MechaniPablo GómezNo ratings yet
- Advanced Heat Transfer Analysis of Continuously Variable Transmissions (CVT) PDFDocument9 pagesAdvanced Heat Transfer Analysis of Continuously Variable Transmissions (CVT) PDFDaniel Escobar100% (1)
- Symmetry 13 01320 v2Document19 pagesSymmetry 13 01320 v2Bilal Hussein SousNo ratings yet
- Applsci 11 06447 v2Document16 pagesApplsci 11 06447 v2Vijay KadliNo ratings yet
- Thermal Management of Power ElectronicsDocument6 pagesThermal Management of Power Electronicsh4n5_chr1sNo ratings yet
- Termico AnalisisDocument6 pagesTermico AnalisisSonia Elizabeth AmanchaNo ratings yet
- Investigation of Operational and Design Parameters Affecting The Thermal Behaviour of Disc-Type WindingDocument9 pagesInvestigation of Operational and Design Parameters Affecting The Thermal Behaviour of Disc-Type WindingДенис ЛяпуновNo ratings yet
- Shevchenko 2017 J. Phys. Conf. Ser. 891 012255Document7 pagesShevchenko 2017 J. Phys. Conf. Ser. 891 012255senthilNo ratings yet
- ProposalDocument8 pagesProposalMontaser KassemNo ratings yet
- A Research On Analysis of Diesel Engine Cooling SystemDocument10 pagesA Research On Analysis of Diesel Engine Cooling SystemAman PokharanaNo ratings yet
- Mathematical Modeling of The Stirling Engine: SciencedirectDocument8 pagesMathematical Modeling of The Stirling Engine: SciencedirecttitzuNo ratings yet
- An Efficient Method To Predict The Heat Transfer Performance of A Louver Fin Radiator in An Automotive Power SystemDocument11 pagesAn Efficient Method To Predict The Heat Transfer Performance of A Louver Fin Radiator in An Automotive Power SystemAB DevilierNo ratings yet
- Singh 等。 - 2021 - Conjugate heat transfer analysis of a rotor bladeDocument31 pagesSingh 等。 - 2021 - Conjugate heat transfer analysis of a rotor bladeXin LiNo ratings yet
- Condition Monitoring System of Wind Generators Based On Study The Effects of The Temperature of The Generator and Permanent MagnetDocument8 pagesCondition Monitoring System of Wind Generators Based On Study The Effects of The Temperature of The Generator and Permanent MagnetKhaled AbdusamadNo ratings yet
- Thermal Performance Assessment of Steam Surface CondenserDocument8 pagesThermal Performance Assessment of Steam Surface CondenserJeeEianYannNo ratings yet
- A Numerical Analysis For The Cooling Module Related To Automobile Air Conditioning SystemDocument10 pagesA Numerical Analysis For The Cooling Module Related To Automobile Air Conditioning SystematosayNo ratings yet
- Internal Combustion Engines ADocument3 pagesInternal Combustion Engines AAnonymous OIUaYiNo ratings yet
- An Approach To Improvement Inheat Flow Analysis of ContinuouslyVariable Transmission (CVT)Document10 pagesAn Approach To Improvement Inheat Flow Analysis of ContinuouslyVariable Transmission (CVT)jszjrNo ratings yet
- Markimoo Enoch Heat Transfer Capstone PaperDocument7 pagesMarkimoo Enoch Heat Transfer Capstone PaperMark Danielle BahintingNo ratings yet
- Icme05 FL 24Document5 pagesIcme05 FL 24gauravglittersNo ratings yet
- Spray Control at TPPDocument13 pagesSpray Control at TPPPUSHKARKHANNANo ratings yet
- Content ServerDocument24 pagesContent Serverayoub reseauNo ratings yet
- Experimental Investigation and Process Parameter Optimization of Sheet Metal Bending by Line Heating MethodDocument12 pagesExperimental Investigation and Process Parameter Optimization of Sheet Metal Bending by Line Heating MethodJoel AbateNo ratings yet
- Miller David A 201905 MSCDocument364 pagesMiller David A 201905 MSCFasihUrRehmanShahNo ratings yet
- Control System Design For Motor Based On Temperature DynamicsDocument11 pagesControl System Design For Motor Based On Temperature DynamicsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Thermal Analysis of Motors and BearingsDocument7 pagesThermal Analysis of Motors and BearingsViria ClaviosNo ratings yet
- Energies: Predicting Temperature of Permanent Magnet Synchronous Motor Based On Deep Neural NetworkDocument14 pagesEnergies: Predicting Temperature of Permanent Magnet Synchronous Motor Based On Deep Neural NetworkShikha AryaNo ratings yet
- G_Nanofluid TEG Cooling SystemDocument8 pagesG_Nanofluid TEG Cooling SystemAmir RostamiNo ratings yet
- Mech 2012Document92 pagesMech 2012AruncpriNo ratings yet
- CFD Study of Fluid Flow and Temperature DistributiDocument5 pagesCFD Study of Fluid Flow and Temperature DistributiДенис ЛяпуновNo ratings yet
- 2009 International Conference On Computer Technology and DevelopmentDocument5 pages2009 International Conference On Computer Technology and DevelopmentkrongdakNo ratings yet
- Understanding CNC RoutersDocument116 pagesUnderstanding CNC RoutersMihaela IleniNo ratings yet
- Racirea Criogenica A SculeiDocument7 pagesRacirea Criogenica A Sculeifujy fujyNo ratings yet
- Energies 13 06032 v2Document17 pagesEnergies 13 06032 v2fujy fujyNo ratings yet
- Mmscience 2021 06 Comparative Analysis of Fluid Cooling Systems in Motorized Spindles1Document9 pagesMmscience 2021 06 Comparative Analysis of Fluid Cooling Systems in Motorized Spindles1fujy fujyNo ratings yet
- Thermodynamics coupled model optimizes high-speed motorized spindleDocument11 pagesThermodynamics coupled model optimizes high-speed motorized spindlefujy fujyNo ratings yet
- Cooling of Motor Spindles-A ReviewDocument23 pagesCooling of Motor Spindles-A Reviewfujy fujyNo ratings yet
- Design and Thermal Characteristic Analysis of Motorized Spindle Cooling SystemDocument14 pagesDesign and Thermal Characteristic Analysis of Motorized Spindle Cooling Systemfujy fujyNo ratings yet
- Cooling System of Motorized High-Speed SpindleDocument6 pagesCooling System of Motorized High-Speed Spindlefujy fujyNo ratings yet
- Denkena2020 Article CoolingOfMotorSpindlesAReviewDocument22 pagesDenkena2020 Article CoolingOfMotorSpindlesAReviewfujy fujyNo ratings yet
- New Methodology Calculations of Radial Stiffness Nodal Points Spindle Machine ToolDocument4 pagesNew Methodology Calculations of Radial Stiffness Nodal Points Spindle Machine Toolfujy fujyNo ratings yet
- Static Analysis of VMC Spindle For Maximum Cutting Force: Mahesh M. Ghadage Prof. Anurag V. KarandeDocument5 pagesStatic Analysis of VMC Spindle For Maximum Cutting Force: Mahesh M. Ghadage Prof. Anurag V. Karandefujy fujyNo ratings yet
- Cooling System of Motorized High-Speed SpindleDocument6 pagesCooling System of Motorized High-Speed Spindlefujy fujyNo ratings yet
- Steel GradesDocument8 pagesSteel GradesSanket Arun MoreNo ratings yet
- Influence of Bearing Arrangements For Static Stiffness Analysis of High Frequency Milling Spindle IJERTCONV3IS17007Document7 pagesInfluence of Bearing Arrangements For Static Stiffness Analysis of High Frequency Milling Spindle IJERTCONV3IS17007fujy fujyNo ratings yet
- Research On Machine Tool Spindle System With Embedded FBG Temperature SensorsDocument10 pagesResearch On Machine Tool Spindle System With Embedded FBG Temperature Sensorsfujy fujyNo ratings yet
- Aft-Catalog s5 SecDocument28 pagesAft-Catalog s5 Secfujy fujyNo ratings yet
- Laborator 1Document4 pagesLaborator 1fujy fujyNo ratings yet
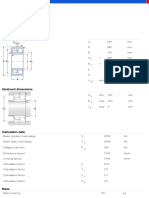
- Spherical Roller Bearings-22248 CC/W33Document2 pagesSpherical Roller Bearings-22248 CC/W33fujy fujyNo ratings yet
- Cloud security and virtualized data center: Micro-segmentation assessmentDocument19 pagesCloud security and virtualized data center: Micro-segmentation assessmentmanishNo ratings yet
- Installations Performed by SAP Setup Fail With Error 0x0000007b (123) On Windows 10 Build 1709Document2 pagesInstallations Performed by SAP Setup Fail With Error 0x0000007b (123) On Windows 10 Build 1709Zakaria BouhouchNo ratings yet
- SETTING OUT LABDocument7 pagesSETTING OUT LABHani Barjok33% (6)
- 20ES2103B - Python Programming - Answers For Short Questions - UNIT - I & IIDocument8 pages20ES2103B - Python Programming - Answers For Short Questions - UNIT - I & IISiva KumarNo ratings yet
- Global SREA Process Change ApprovalDocument19 pagesGlobal SREA Process Change Approval楊宗棠No ratings yet
- Ec 115 Extens ColumnsDocument34 pagesEc 115 Extens Columnssandya23No ratings yet
- Microprocessor Aktu Sem 3 CT 1 KecDocument1 pageMicroprocessor Aktu Sem 3 CT 1 KecLakshitNo ratings yet
- Participant Scores 62% in Station Controller TestDocument42 pagesParticipant Scores 62% in Station Controller TestGaurav sengarNo ratings yet
- Health Monitoring System of Patient Using IoTDocument36 pagesHealth Monitoring System of Patient Using IoTNaga Ananth100% (1)
- Doku - Pub Share Market Basics in Tamil PDF Download Google SearchDocument2 pagesDoku - Pub Share Market Basics in Tamil PDF Download Google Searchsemselvan794694No ratings yet
- CSTUPDocument8 pagesCSTUPsaurabh singhNo ratings yet
- An 01 en Opticum Xs65 HD Sat ReceiverDocument49 pagesAn 01 en Opticum Xs65 HD Sat ReceiverRoxana BirtumNo ratings yet
- dcb7005 PDFDocument25 pagesdcb7005 PDFSomadbsiNo ratings yet
- High Reliability Hall Effect SensorDocument2 pagesHigh Reliability Hall Effect SensorHari KiranNo ratings yet
- Bill Payment: Details On Breb (Prepaid) ConfigurationDocument12 pagesBill Payment: Details On Breb (Prepaid) ConfigurationMd Tanvir Hossain100% (1)
- Bug Bounty CheatsheetDocument53 pagesBug Bounty CheatsheetMichel EdiNo ratings yet
- Muhammad Umair Ismail Mechanical Engineer: Cell Phone: EmailDocument2 pagesMuhammad Umair Ismail Mechanical Engineer: Cell Phone: EmailUmairIsmailNo ratings yet
- SAFe AgilistDocument18 pagesSAFe AgilistAlexNo ratings yet
- Google Map - DartDocument9 pagesGoogle Map - Dartİlter Engin KIZILGÜNNo ratings yet
- L78M00 Series: Positive Voltage RegulatorsDocument19 pagesL78M00 Series: Positive Voltage RegulatorsHenderson TshikwataNo ratings yet
- Syllabus 5 - Module 7 - Using The Internet & EmailDocument5 pagesSyllabus 5 - Module 7 - Using The Internet & EmailBalachandran NavaratnasamyNo ratings yet
- UntitledDocument254 pagesUntitledAllesteir AlfrediNo ratings yet
- Thermal Design and Analysis of An Air Cooled X-Band Active Phased Array Antenna-IRSI 17-004Document5 pagesThermal Design and Analysis of An Air Cooled X-Band Active Phased Array Antenna-IRSI 17-004Swadish KashyupNo ratings yet
- P Series Fiber Laser UGDocument67 pagesP Series Fiber Laser UGHG GROUPNo ratings yet
- Lab Activity 6 - Bsece 3-1 - GomezDocument11 pagesLab Activity 6 - Bsece 3-1 - GomezChristian GomezNo ratings yet
- PeopleSoft HCM Update Image 18-21 and ELM Update Image 14-15 OverviewDocument63 pagesPeopleSoft HCM Update Image 18-21 and ELM Update Image 14-15 Overviewlove.tatankaNo ratings yet
- Eim 1Document11 pagesEim 1Kat ManuelNo ratings yet
- Seat Belt UsageDocument2 pagesSeat Belt UsageAnkitRavalNo ratings yet
- Work at Heigh at Night SafetyDocument49 pagesWork at Heigh at Night SafetyKhuda BukshNo ratings yet
- Arduino Mario Bros Tunes With Piezo Buzzer and PWMDocument6 pagesArduino Mario Bros Tunes With Piezo Buzzer and PWMClaudia GrijalvaNo ratings yet
- The Laws of Thermodynamics: A Very Short IntroductionFrom EverandThe Laws of Thermodynamics: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (10)
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseFrom EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseRating: 4.5 out of 5 stars4.5/5 (51)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionFrom EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionRating: 4.5 out of 5 stars4.5/5 (3)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- Waves and Beaches: The Powerful Dynamics of Sea and CoastFrom EverandWaves and Beaches: The Powerful Dynamics of Sea and CoastRating: 4 out of 5 stars4/5 (1)
- Pilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CFrom EverandPilot's Handbook of Aeronautical Knowledge (2024): FAA-H-8083-25CNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Marine and Offshore Pumping and Piping SystemsFrom EverandMarine and Offshore Pumping and Piping SystemsRating: 4.5 out of 5 stars4.5/5 (2)
- Quantum Mechanics 3: Wavefunctions, Superposition, & Virtual ParticlesFrom EverandQuantum Mechanics 3: Wavefunctions, Superposition, & Virtual ParticlesNo ratings yet
- Handbook of Mechanical and Materials EngineeringFrom EverandHandbook of Mechanical and Materials EngineeringRating: 5 out of 5 stars5/5 (4)
- Pressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedFrom EverandPressure Vessels: Design, Formulas, Codes, and Interview Questions & Answers ExplainedRating: 5 out of 5 stars5/5 (1)
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsFrom EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNo ratings yet
- A Quick Guide to API 653 Certified Storage Tank Inspector Syllabus: Example Questions and Worked AnswersFrom EverandA Quick Guide to API 653 Certified Storage Tank Inspector Syllabus: Example Questions and Worked AnswersRating: 3.5 out of 5 stars3.5/5 (19)
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- Zinn & the Art of Mountain Bike Maintenance: The World's Best-Selling Guide to Mountain Bike RepairFrom EverandZinn & the Art of Mountain Bike Maintenance: The World's Best-Selling Guide to Mountain Bike RepairNo ratings yet