You might also like
- Precision Agriculture_ Embracing Technology for Efficient Crop ManagementFrom EverandPrecision Agriculture_ Embracing Technology for Efficient Crop ManagementNo ratings yet
- A Template-Free Machine Vision-Based Crop Row Detection AlgorithmDocument30 pagesA Template-Free Machine Vision-Based Crop Row Detection AlgorithmxielockNo ratings yet
- Harvesting robot for cherry tomatoesDocument2 pagesHarvesting robot for cherry tomatoesamen abbasiNo ratings yet
- PhotogrammetryDocument14 pagesPhotogrammetryNarcisa Nayeli Carrion CoxNo ratings yet
- Acta Scientiarum: Weed-Removal System Based On Artificial Vision and Movement Planning by A and RRT TechniquesDocument9 pagesActa Scientiarum: Weed-Removal System Based On Artificial Vision and Movement Planning by A and RRT TechniquesFADASDADSNo ratings yet
- A Machine Vision System For The Apple Harvesting Robot: D. M. B, T. K, Y. O, T. HDocument11 pagesA Machine Vision System For The Apple Harvesting Robot: D. M. B, T. K, Y. O, T. HMuhammad Ibni Abdillah AlUmairyNo ratings yet
- Computer Vision Methods For Locating Fruit On TreesDocument5 pagesComputer Vision Methods For Locating Fruit On TreesMahenoor SiddiquiNo ratings yet
- AI-Based Crop Disease and Yield PredictionDocument8 pagesAI-Based Crop Disease and Yield PredictionSantoshNo ratings yet
- Automatic Classification Using Image Processing Technique in Matlab For Orange FruitsDocument14 pagesAutomatic Classification Using Image Processing Technique in Matlab For Orange FruitsMR. ADARSH KUMAR NAYAKNo ratings yet
- Sensors: Sensors in Agriculture and ForestryDocument8 pagesSensors: Sensors in Agriculture and ForestryHelio JuniorNo ratings yet
- IJRPR20787Document8 pagesIJRPR20787Gumar YuNo ratings yet
- 2499 12202 1 PBDocument13 pages2499 12202 1 PBLean Karlo TolentinoNo ratings yet
- Smart Farming An Approch For Disease Detection Implementing IoT and Image Processing. InternationalDocument14 pagesSmart Farming An Approch For Disease Detection Implementing IoT and Image Processing. InternationalNaoual NajiNo ratings yet
- Agriengineering 01 00029 v2 PDFDocument12 pagesAgriengineering 01 00029 v2 PDFAnshuman TagoreNo ratings yet
- Artificial Intelligence Approach For Tomato Detection and Mass Estimation in Precision AgricultureDocument15 pagesArtificial Intelligence Approach For Tomato Detection and Mass Estimation in Precision AgricultureDr. S. G. ShivaPrasad YadavNo ratings yet
- Development of A Low Cost Machine Vision System For Sorting of TomatoesDocument8 pagesDevelopment of A Low Cost Machine Vision System For Sorting of TomatoesPhạm QuangNo ratings yet
- Weed Detection Using Convolutional Neural NetworkDocument4 pagesWeed Detection Using Convolutional Neural NetworkBOHR International Journal of Intelligent Instrumentation and Computing (BIJIIAC)No ratings yet
- A Robot For Harvesting Sweet-Pepper in GreenhousesDocument8 pagesA Robot For Harvesting Sweet-Pepper in GreenhousesSindhu BhaskarNo ratings yet
- Pomegranate Fruit Quality Assessment Using MachineDocument8 pagesPomegranate Fruit Quality Assessment Using Machinemanju989No ratings yet
- Potato Size and Shape Detection Using Machine VisiDocument5 pagesPotato Size and Shape Detection Using Machine VisiMusabbir Ahmed ArrafiNo ratings yet
- Iraji 2018Document15 pagesIraji 2018Jose LuisNo ratings yet
- Research Article: Application of New Technology of Intelligent Robot Plant Protection in Ecological AgricultureDocument7 pagesResearch Article: Application of New Technology of Intelligent Robot Plant Protection in Ecological AgricultureRaffik RasheedNo ratings yet
- AiotDocument2 pagesAiotakashNo ratings yet
- High Speed Tomato Classifier by Colour, Size & WeightDocument12 pagesHigh Speed Tomato Classifier by Colour, Size & WeightJosé Carlos Camino GonzálezNo ratings yet
- Use of Machine Vision To Sort Tomato Seedlings For Grafting RobotDocument7 pagesUse of Machine Vision To Sort Tomato Seedlings For Grafting RobotRahma Wati PertiwiNo ratings yet
- A Review On The Role of Machine Learning in Agriculture: AbstractDocument8 pagesA Review On The Role of Machine Learning in Agriculture: AbstractPhuc SJNo ratings yet
- Paper 123Document25 pagesPaper 123hodNo ratings yet
- Agronomy: Development of Monitoring Robot System For Tomato Fruits in Hydroponic GreenhousesDocument14 pagesAgronomy: Development of Monitoring Robot System For Tomato Fruits in Hydroponic GreenhousesnamalNo ratings yet
- T3-Automatic Detection of Fruits in Coffee Crops From Aerial Images PDFDocument6 pagesT3-Automatic Detection of Fruits in Coffee Crops From Aerial Images PDFAnalis SoaresNo ratings yet
- Sensors: Monitoring Plant Status and Fertilization Strategy Through Multispectral ImagesDocument21 pagesSensors: Monitoring Plant Status and Fertilization Strategy Through Multispectral ImagesMatheus CardimNo ratings yet
- Jam 418431645389000Document17 pagesJam 418431645389000Gamboo OxNo ratings yet
- Development of A Tomato Harvesting Robot Used in GreenhouseDocument10 pagesDevelopment of A Tomato Harvesting Robot Used in GreenhousePrimoJr CarilloNo ratings yet
- Leaf Disease Detection and Prevention Using Support Vector Machine Based On Image Processing in MatlabDocument7 pagesLeaf Disease Detection and Prevention Using Support Vector Machine Based On Image Processing in MatlabSashank JaiswalNo ratings yet
- v1 CoveredDocument17 pagesv1 CoveredTefeNo ratings yet
- Recognition and Localization of Ripen Tomato BasedDocument7 pagesRecognition and Localization of Ripen Tomato BasedramblicasNo ratings yet
- Computers and Electronics in AgricultureDocument8 pagesComputers and Electronics in AgricultureSindhu BhaskarNo ratings yet
- Deep Learning For Smart AgricultureDocument6 pagesDeep Learning For Smart AgriculturetoNo ratings yet
- Fuzzy Classification of The Maturity of The TomatoDocument13 pagesFuzzy Classification of The Maturity of The TomatoRanjani VasuNo ratings yet
- Computerized Spoiled Tomato DetectionDocument4 pagesComputerized Spoiled Tomato DetectionInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Project Tittle and AbstractDocument1 pageProject Tittle and AbstractSanthosh Kumar SNo ratings yet
- The Model For The Classification of The Ripeness SDocument16 pagesThe Model For The Classification of The Ripeness SRiya ShahNo ratings yet
- Fruit Detection and Sorting Based On Machine LearningDocument6 pagesFruit Detection and Sorting Based On Machine LearningGRD Journals100% (1)
- Implementation of Fruits Grading and Sorting System by Using Image Processing and Data ClassifierDocument6 pagesImplementation of Fruits Grading and Sorting System by Using Image Processing and Data ClassifierKaren Joy BabidaNo ratings yet
- High Speed Intelligent Classifier of Tomatoes by Colour, Size and WeightDocument12 pagesHigh Speed Intelligent Classifier of Tomatoes by Colour, Size and Weightjakalae5263No ratings yet
- Immature Green Citrus Fruit Detection and Counting Based On Fast Normalized Cross Correlation (FNCC) Using Natural Outdoor Colour ImagesDocument20 pagesImmature Green Citrus Fruit Detection and Counting Based On Fast Normalized Cross Correlation (FNCC) Using Natural Outdoor Colour ImagesRanjani VasuNo ratings yet
- Fruit Sorting Robot Based On Color and Size For An Agricultural Product Packaging SystemDocument8 pagesFruit Sorting Robot Based On Color and Size For An Agricultural Product Packaging SystemOm RanjalkarNo ratings yet
- Automated Image Capturing System For Deep Learning-Based Tomato Plant Leaf Disease Detection and RecognitionDocument6 pagesAutomated Image Capturing System For Deep Learning-Based Tomato Plant Leaf Disease Detection and RecognitionEdgar AguirreNo ratings yet
- Sensors 18 04245Document16 pagesSensors 18 04245Rizki Moch RijaldiNo ratings yet
- 3D Reconstruction of Plants Using Structured LightDocument26 pages3D Reconstruction of Plants Using Structured LightNguyễnTrungKiênNo ratings yet
- Design and Evaluation of A Maize Monitoring System For Precision PlantingDocument7 pagesDesign and Evaluation of A Maize Monitoring System For Precision PlantingNoureldin SharabyNo ratings yet
- An Automatic Method For Identifying Different Variety of Rice Seeds Using Machine Vision TechnologyDocument5 pagesAn Automatic Method For Identifying Different Variety of Rice Seeds Using Machine Vision TechnologyMekaTronNo ratings yet
- Fruit Detection and Robotic Apple Harvesting SystemDocument14 pagesFruit Detection and Robotic Apple Harvesting SystemSindhu BhaskarNo ratings yet
- Crop Field Image Dataset for Computer Vision Agriculture TasksDocument28 pagesCrop Field Image Dataset for Computer Vision Agriculture TasksParamesh WaranNo ratings yet
- Crop Recommendation System by Artificial Neural NeDocument18 pagesCrop Recommendation System by Artificial Neural Nesyed21ad067No ratings yet
- Synopsis 10Document9 pagesSynopsis 10biradararun333No ratings yet
- CV Agriculture 2010Document12 pagesCV Agriculture 2010Thuy NguyenNo ratings yet
- IoT Agribot for Irrigation & Farm MonitoringDocument46 pagesIoT Agribot for Irrigation & Farm MonitoringMohammed ZubairNo ratings yet
- Conclusions of The PHD ThesisDocument21 pagesConclusions of The PHD ThesisCésarF.HuamaníAyalaNo ratings yet
- Early Detection of Tomato Leaf Diseases Based On Deep Learning TechniquesDocument7 pagesEarly Detection of Tomato Leaf Diseases Based On Deep Learning TechniquesIAES IJAINo ratings yet
- 9.size Classification of Tomato Fruit Using Thresholding, Machine Learning and Deep Learning TechniquesDocument11 pages9.size Classification of Tomato Fruit Using Thresholding, Machine Learning and Deep Learning TechniquesGodGun ControlNo ratings yet
- Agronomy 12 02535Document40 pagesAgronomy 12 02535Jose LuisNo ratings yet
- Agronomy 12 02539Document17 pagesAgronomy 12 02539Jose LuisNo ratings yet
- Agronomy 12 02517 v2Document21 pagesAgronomy 12 02517 v2Jose LuisNo ratings yet
- Agronomy 12 02532Document13 pagesAgronomy 12 02532Jose LuisNo ratings yet
- Agronomy 12 02531Document13 pagesAgronomy 12 02531Jose LuisNo ratings yet
- Agronomy 12 02518Document19 pagesAgronomy 12 02518Jose LuisNo ratings yet
- Agronomy 12 02516Document15 pagesAgronomy 12 02516Jose LuisNo ratings yet
- Agronomy 12 02534Document11 pagesAgronomy 12 02534Jose LuisNo ratings yet
- Wang 2011Document5 pagesWang 2011Jose LuisNo ratings yet
- Agronomy 12 02532Document13 pagesAgronomy 12 02532Jose LuisNo ratings yet
- Iraji 2018Document15 pagesIraji 2018Jose LuisNo ratings yet
- Belforte 2017Document9 pagesBelforte 2017Jose LuisNo ratings yet
- Agronomy 12 02536Document14 pagesAgronomy 12 02536Jose LuisNo ratings yet
- Agronomy 12 02535Document40 pagesAgronomy 12 02535Jose LuisNo ratings yet
- Development of Machine-Vision System For Gap Inspection of Muskmelon Grafted SeedlingsDocument12 pagesDevelopment of Machine-Vision System For Gap Inspection of Muskmelon Grafted SeedlingsJose LuisNo ratings yet
- Agronomy 12 02533Document16 pagesAgronomy 12 02533Jose LuisNo ratings yet
- A Framework For Identification of Healthy Potted Seedlings in Automatic Transplanting System Using Computer VisionDocument10 pagesA Framework For Identification of Healthy Potted Seedlings in Automatic Transplanting System Using Computer VisionJose LuisNo ratings yet
- Sciencedirect: Robot Ensembles For Grafting Herbaceous CropsDocument13 pagesSciencedirect: Robot Ensembles For Grafting Herbaceous CropsJose LuisNo ratings yet
- Multiple Single-Axis Robots For Automated Grafting Machine Supplying SystemDocument7 pagesMultiple Single-Axis Robots For Automated Grafting Machine Supplying SystemJose LuisNo ratings yet
- Liu 2020 J. Phys. Conf. Ser. 1575 012106Document9 pagesLiu 2020 J. Phys. Conf. Ser. 1575 012106Jose LuisNo ratings yet
- Development of 2JC-350 Automatic Grafting Machine With Cut Grafting Method For Vegetable SeedlingDocument4 pagesDevelopment of 2JC-350 Automatic Grafting Machine With Cut Grafting Method For Vegetable SeedlingJose LuisNo ratings yet
- Recognition and Localization of Ripen Tomato Based On Machine VisionDocument6 pagesRecognition and Localization of Ripen Tomato Based On Machine VisionJose LuisNo ratings yet
- Use of Machine Vision To Sort Tomato Seedlings For Grafting RobotDocument7 pagesUse of Machine Vision To Sort Tomato Seedlings For Grafting RobotJose LuisNo ratings yet
- Agriculture: Study On The Method of Matched Splice Grafting For Melon Seedlings Based On Visual ImageDocument16 pagesAgriculture: Study On The Method of Matched Splice Grafting For Melon Seedlings Based On Visual ImageJose LuisNo ratings yet
- Applied Sciences: Behavior of Di Automated Technology For Splice Grafting TechniqueDocument15 pagesApplied Sciences: Behavior of Di Automated Technology For Splice Grafting TechniqueJose LuisNo ratings yet
- Agriculture: Design and Experiment of Full-Tray Grafting Device For Grafted Melon Seedling ProductionDocument12 pagesAgriculture: Design and Experiment of Full-Tray Grafting Device For Grafted Melon Seedling ProductionJose LuisNo ratings yet
- Machine Vision To Inspect Tomato Seedlings For Grafting RobotDocument8 pagesMachine Vision To Inspect Tomato Seedlings For Grafting RobotJose LuisNo ratings yet
- Agriculture 12 00797Document12 pagesAgriculture 12 00797Jose LuisNo ratings yet
- Tian 2017Document12 pagesTian 2017Jose Luis Pardo AlonsoNo ratings yet
- Solve Equations and InequalitiesDocument13 pagesSolve Equations and InequalitiesFons Roxas-ChuaNo ratings yet
- Tabel Distribusi PoissonDocument2 pagesTabel Distribusi PoissonYo WassupNo ratings yet
- Flammability Characteristics of Common Gases and LiquidsDocument1 pageFlammability Characteristics of Common Gases and LiquidsNeme VasquesNo ratings yet
- Manual Liebert PSADocument12 pagesManual Liebert PSAMatthew CannonNo ratings yet
- 28 ElectroplatingElectronicsDocument100 pages28 ElectroplatingElectronicsLaboratorium KIESOWNo ratings yet
- Bar Code Label Requirements, Compatibility, and UsageDocument22 pagesBar Code Label Requirements, Compatibility, and Usagelarrylegend33No ratings yet
- ClientleDocument1 pageClientleRaghvendra ManiNo ratings yet
- ECI 80 Structural Steel DeckingDocument3 pagesECI 80 Structural Steel Deckingkishore varmaNo ratings yet
- G650 Unimog UL1750 RAAF Data Summary 0Document4 pagesG650 Unimog UL1750 RAAF Data Summary 0Jimmy50% (2)
- New Correlations For Predicting Two Phase Electrical SubmersibleDocument11 pagesNew Correlations For Predicting Two Phase Electrical SubmersibleNicolás Ruiz FuentesNo ratings yet
- Analysis of Power Quality Issues and Implementation of UPQC Topologies To Enhance Power System StabilityDocument16 pagesAnalysis of Power Quality Issues and Implementation of UPQC Topologies To Enhance Power System StabilityEditor IJTSRDNo ratings yet
- NetWorking Flashcards - QuizletDocument262 pagesNetWorking Flashcards - QuizletGB ReddyNo ratings yet
- Welcome To Primary 1!Document48 pagesWelcome To Primary 1!Zoe WangNo ratings yet
- Micom P44X: Numerical Distance Protection RelayDocument80 pagesMicom P44X: Numerical Distance Protection RelayKuenley TiNy OndeNo ratings yet
- Schizophrenia Symptom Alleviation Through Implementation of A Lifestyle Intervention ProgramDocument6 pagesSchizophrenia Symptom Alleviation Through Implementation of A Lifestyle Intervention ProgramDr.AhmadNo ratings yet
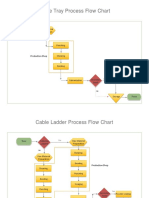
- Process Flow ChartDocument4 pagesProcess Flow Chartchacko chiramalNo ratings yet
- Electrolytic CellDocument24 pagesElectrolytic CellIntani Mundiartasari100% (1)
- MCQs in Oral Surgery by Babu SParmarDocument517 pagesMCQs in Oral Surgery by Babu SParmarAmr KhattabNo ratings yet
- 2500 Supreme IO&M ManualDocument36 pages2500 Supreme IO&M Manualadrianram1No ratings yet
- HTTP Sleekfreak Ath CX 81 3wdev CD3WD METALWRK GTZ075CE B65 7 HTMDocument14 pagesHTTP Sleekfreak Ath CX 81 3wdev CD3WD METALWRK GTZ075CE B65 7 HTMPavan SripadaNo ratings yet
- B10 GeniE Member Plate Code CheckingDocument51 pagesB10 GeniE Member Plate Code CheckingJorge HLNo ratings yet
- Adobe Scan 11-Oct-2022Document5 pagesAdobe Scan 11-Oct-2022onkarkumarsolankiNo ratings yet
- Galeo Wa430-6 PDFDocument1,612 pagesGaleo Wa430-6 PDFWalter100% (1)
- Chi-Square Test: Prem Mann, Introductory Statistics, 7/EDocument33 pagesChi-Square Test: Prem Mann, Introductory Statistics, 7/ESaleh Mohammad Tarif 1912343630No ratings yet
- FinalDocument6 pagesFinalIwan IwanNo ratings yet
- 1.trijang Rinpoche Bio CompleteDocument265 pages1.trijang Rinpoche Bio CompleteDhamma_Storehouse100% (1)
- Recrystallization Mechanisms and Microstructure Development inDocument15 pagesRecrystallization Mechanisms and Microstructure Development invibeunguNo ratings yet
- Profession Jokes - DoctorsDocument10 pagesProfession Jokes - DoctorssagararlaNo ratings yet
- Quickspecs: HP Z840 WorkstationDocument108 pagesQuickspecs: HP Z840 WorkstationAbraham Leon GuardalesNo ratings yet
- I See Fire ChordsDocument4 pagesI See Fire ChordsIm In TroubleNo ratings yet
- Why We Die: The New Science of Aging and the Quest for ImmortalityFrom EverandWhy We Die: The New Science of Aging and the Quest for ImmortalityRating: 3.5 out of 5 stars3.5/5 (2)
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionFrom EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionRating: 4 out of 5 stars4/5 (811)
- When the Body Says No by Gabor Maté: Key Takeaways, Summary & AnalysisFrom EverandWhen the Body Says No by Gabor Maté: Key Takeaways, Summary & AnalysisRating: 3.5 out of 5 stars3.5/5 (2)
- Tales from Both Sides of the Brain: A Life in NeuroscienceFrom EverandTales from Both Sides of the Brain: A Life in NeuroscienceRating: 3 out of 5 stars3/5 (18)
- All That Remains: A Renowned Forensic Scientist on Death, Mortality, and Solving CrimesFrom EverandAll That Remains: A Renowned Forensic Scientist on Death, Mortality, and Solving CrimesRating: 4.5 out of 5 stars4.5/5 (397)
- Crypt: Life, Death and Disease in the Middle Ages and BeyondFrom EverandCrypt: Life, Death and Disease in the Middle Ages and BeyondRating: 4 out of 5 stars4/5 (3)
- The Consciousness Instinct: Unraveling the Mystery of How the Brain Makes the MindFrom EverandThe Consciousness Instinct: Unraveling the Mystery of How the Brain Makes the MindRating: 4.5 out of 5 stars4.5/5 (93)
- Good Without God: What a Billion Nonreligious People Do BelieveFrom EverandGood Without God: What a Billion Nonreligious People Do BelieveRating: 4 out of 5 stars4/5 (66)
- This Is Your Brain On Parasites: How Tiny Creatures Manipulate Our Behavior and Shape SocietyFrom EverandThis Is Your Brain On Parasites: How Tiny Creatures Manipulate Our Behavior and Shape SocietyRating: 3.5 out of 5 stars3.5/5 (31)
- 10% Human: How Your Body's Microbes Hold the Key to Health and HappinessFrom Everand10% Human: How Your Body's Microbes Hold the Key to Health and HappinessRating: 4 out of 5 stars4/5 (33)
- A Brief History of Intelligence: Evolution, AI, and the Five Breakthroughs That Made Our BrainsFrom EverandA Brief History of Intelligence: Evolution, AI, and the Five Breakthroughs That Made Our BrainsRating: 4.5 out of 5 stars4.5/5 (4)
- Who's in Charge?: Free Will and the Science of the BrainFrom EverandWho's in Charge?: Free Will and the Science of the BrainRating: 4 out of 5 stars4/5 (65)
- The Other Side of Normal: How Biology Is Providing the Clues to Unlock the Secrets of Normal and Abnormal BehaviorFrom EverandThe Other Side of Normal: How Biology Is Providing the Clues to Unlock the Secrets of Normal and Abnormal BehaviorNo ratings yet
- The Lives of Bees: The Untold Story of the Honey Bee in the WildFrom EverandThe Lives of Bees: The Untold Story of the Honey Bee in the WildRating: 4.5 out of 5 stars4.5/5 (44)
- Undeniable: How Biology Confirms Our Intuition That Life Is DesignedFrom EverandUndeniable: How Biology Confirms Our Intuition That Life Is DesignedRating: 4 out of 5 stars4/5 (11)
- Human: The Science Behind What Makes Your Brain UniqueFrom EverandHuman: The Science Behind What Makes Your Brain UniqueRating: 3.5 out of 5 stars3.5/5 (38)
- Wayfinding: The Science and Mystery of How Humans Navigate the WorldFrom EverandWayfinding: The Science and Mystery of How Humans Navigate the WorldRating: 4.5 out of 5 stars4.5/5 (18)
- The Second Brain: A Groundbreaking New Understanding of Nervous Disorders of the Stomach and IntestineFrom EverandThe Second Brain: A Groundbreaking New Understanding of Nervous Disorders of the Stomach and IntestineRating: 4 out of 5 stars4/5 (17)
- Superlative: The Biology of ExtremesFrom EverandSuperlative: The Biology of ExtremesRating: 4.5 out of 5 stars4.5/5 (51)
- Buddha's Brain: The Practical Neuroscience of Happiness, Love & WisdomFrom EverandBuddha's Brain: The Practical Neuroscience of Happiness, Love & WisdomRating: 4 out of 5 stars4/5 (215)
- Eels: An Exploration, from New Zealand to the Sargasso, of the World's Most Mysterious FishFrom EverandEels: An Exploration, from New Zealand to the Sargasso, of the World's Most Mysterious FishRating: 4 out of 5 stars4/5 (30)
- The Molecule of More: How a Single Chemical in Your Brain Drives Love, Sex, and Creativity--and Will Determine the Fate of the Human RaceFrom EverandThe Molecule of More: How a Single Chemical in Your Brain Drives Love, Sex, and Creativity--and Will Determine the Fate of the Human RaceRating: 4.5 out of 5 stars4.5/5 (515)
- Human Errors: A Panorama of Our Glitches, from Pointless Bones to Broken GenesFrom EverandHuman Errors: A Panorama of Our Glitches, from Pointless Bones to Broken GenesRating: 3.5 out of 5 stars3.5/5 (56)
- Darwin's Dangerous Idea: Evolution and the Meaning of LifeFrom EverandDarwin's Dangerous Idea: Evolution and the Meaning of LifeRating: 4 out of 5 stars4/5 (523)
- The Mind & The Brain: Neuroplasticity and the Power of Mental ForceFrom EverandThe Mind & The Brain: Neuroplasticity and the Power of Mental ForceNo ratings yet
- The Dragons of Eden: Speculations on the Evolution of Human IntelligenceFrom EverandThe Dragons of Eden: Speculations on the Evolution of Human IntelligenceRating: 4 out of 5 stars4/5 (632)