You might also like
- DSP Lecture Notes 6th Sem Etc Complete 1588251170Document61 pagesDSP Lecture Notes 6th Sem Etc Complete 1588251170Prasad LoyalNo ratings yet
- Unit I - Introduction SyllabusDocument18 pagesUnit I - Introduction Syllabusrahaman mahamadNo ratings yet
- Dep Chapter 1Document55 pagesDep Chapter 1Daniel MengeshaNo ratings yet
- IT341 DSP Lec#3Document45 pagesIT341 DSP Lec#3Yousef QuriedNo ratings yet
- Digital Signal ProcessingDocument13 pagesDigital Signal Processingaloove66No ratings yet
- DSP Discrete Time Systems & Signal Processing NotesDocument19 pagesDSP Discrete Time Systems & Signal Processing Notessyed ibrahimNo ratings yet
- Lab 2Document13 pagesLab 2Nida NazNo ratings yet
- Digital Signal Processing (DSP)Document0 pagesDigital Signal Processing (DSP)www.bhawesh.com.npNo ratings yet
- Signal: Continuous-Time Signal: Defined in A Continuous Range of TimeDocument8 pagesSignal: Continuous-Time Signal: Defined in A Continuous Range of TimeElla BongiadNo ratings yet
- Digital Signal Processing Two MarksDocument11 pagesDigital Signal Processing Two MarksDelphin ShibinNo ratings yet
- DSP 2 Marks PDFDocument18 pagesDSP 2 Marks PDFPavithra MohanNo ratings yet
- Digital Signal Processing FundamentalsDocument47 pagesDigital Signal Processing FundamentalsShimaa ashrafNo ratings yet
- Cs2403 - Digital Signal Processing Unit-I Signals & SystemsDocument18 pagesCs2403 - Digital Signal Processing Unit-I Signals & SystemsSuresh DskNo ratings yet
- Digital Signal Processing: Discrete-Time Systems Lecture - 4Document9 pagesDigital Signal Processing: Discrete-Time Systems Lecture - 4Saif AlabdullahNo ratings yet
- Ec2312 - Digital Signal Processing: Om SathiDocument22 pagesEc2312 - Digital Signal Processing: Om SathiSarojini MuthuNo ratings yet
- Ee6403 DTSP123Document12 pagesEe6403 DTSP123VijayNo ratings yet
- Digital Signal ProcessingDocument36 pagesDigital Signal ProcessingShaji Joseph100% (8)
- Lecture1&2 DSPDocument44 pagesLecture1&2 DSPfouadbalomiNo ratings yet
- Ee6403 DSP 2mDocument31 pagesEe6403 DSP 2msyed ibrahimNo ratings yet
- Ee 693 Lab Manual Final Control System 2Document42 pagesEe 693 Lab Manual Final Control System 2KumarNo ratings yet
- Digital Signal Processing Eee Fifth by L N Sith SirDocument55 pagesDigital Signal Processing Eee Fifth by L N Sith Sirnikita jagtapNo ratings yet
- Lab Manual CDocument42 pagesLab Manual CGumnam BandaNo ratings yet
- Digital Signal Processing FundamentalsDocument15 pagesDigital Signal Processing FundamentalsPreetham SaigalNo ratings yet
- Dsp-محاضرات الكورس الاولDocument34 pagesDsp-محاضرات الكورس الاولMohammed YounisNo ratings yet
- B.Suresh Kumar Ap/Ece Tkec Ec6502 PDSP Two MarksDocument14 pagesB.Suresh Kumar Ap/Ece Tkec Ec6502 PDSP Two MarksSuresh KumarNo ratings yet
- DSP - Chapter 2 - B - Time Domain AnalysisDocument22 pagesDSP - Chapter 2 - B - Time Domain AnalysisMoiz SiddiquiNo ratings yet
- Multirate DSP ApplicationsDocument27 pagesMultirate DSP ApplicationsPhạm Văn BiênNo ratings yet
- Asp Unit 1Document57 pagesAsp Unit 1Gaurav KumarNo ratings yet
- SelvamDocument40 pagesSelvamgopiphdNo ratings yet
- DSP Chapter 2 Part 1Document45 pagesDSP Chapter 2 Part 1api-26581966100% (1)
- Advanced Digital Signal Processing Spring 2012: Signal Representation and Time Domain AnalysisDocument46 pagesAdvanced Digital Signal Processing Spring 2012: Signal Representation and Time Domain AnalysisShoaib MalikNo ratings yet
- DSP Lab Manual 2010Document53 pagesDSP Lab Manual 2010nullka0% (1)
- Digital SignalDocument42 pagesDigital SignalRuby ManauisNo ratings yet
- DSP 2 MarksDocument20 pagesDSP 2 MarksSanthosh SandyNo ratings yet
- DSP EXP. 5 SolutionDocument10 pagesDSP EXP. 5 Solution01haval 10No ratings yet
- LAB 2: Discrete Time Signals & Linear System ObjectivesDocument12 pagesLAB 2: Discrete Time Signals & Linear System Objectivesmjrahimi.eee2020No ratings yet
- CHAPTER ONE (4)Document14 pagesCHAPTER ONE (4)kalshkinguNo ratings yet
- Experiment 3Document4 pagesExperiment 3Anonymous 5YbFQnHNo ratings yet
- Unit 1Document406 pagesUnit 1Bairam Ravi KumarNo ratings yet
- An FPGA-Based Digital Modulation Signal Generator With Fading Channel EmulationDocument5 pagesAn FPGA-Based Digital Modulation Signal Generator With Fading Channel Emulationsenao71263No ratings yet
- W2 Lesson 2 - Theory of Discrete-Time Signals and Systems - ModuleDocument9 pagesW2 Lesson 2 - Theory of Discrete-Time Signals and Systems - ModuleJohn Patrick PinedaNo ratings yet
- DSP 2marksDocument22 pagesDSP 2marksSuneelkrishna RallabhandiNo ratings yet
- DSP Manual - 2017 VTU 2015 Cbcs SchemeDocument99 pagesDSP Manual - 2017 VTU 2015 Cbcs SchemeNikhil Miranda100% (1)
- BITS Pilani: Digital Signal ProcessingDocument73 pagesBITS Pilani: Digital Signal Processingaditi_nangia_1No ratings yet
- Digital Signal Processing-EeeDocument24 pagesDigital Signal Processing-EeesridharanchandranNo ratings yet
- Discrete-Time Signal & SystemDocument20 pagesDiscrete-Time Signal & SystemismailNo ratings yet
- Signals and Systems FundamentalsDocument114 pagesSignals and Systems FundamentalsReegan BoseNo ratings yet
- DSPDocument81 pagesDSPphqdkpiq4No ratings yet
- Signal Processing in Digital ControlDocument40 pagesSignal Processing in Digital ControlSaiRoopa GaliveetiNo ratings yet
- Vlsi Signal ProcessingDocument455 pagesVlsi Signal ProcessingPavan TejaNo ratings yet
- Lecture 5 PCMDocument38 pagesLecture 5 PCMSakawa BobNo ratings yet
- Chap 2Document51 pagesChap 217-Krishan Dev RaiNo ratings yet
- DIGITAL SIGNAL PROCESSING LAB: IMPLEMENTATION OF HP IIR FILTERDocument12 pagesDIGITAL SIGNAL PROCESSING LAB: IMPLEMENTATION OF HP IIR FILTERLokam AvanthikaNo ratings yet
- Digital control system designDocument31 pagesDigital control system designdini bestNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- ch-2 Adaptive - 220404 - 132005 PDFDocument34 pagesch-2 Adaptive - 220404 - 132005 PDFSaif AlabdullahNo ratings yet
- Lec 8Document59 pagesLec 8Saif AlabdullahNo ratings yet
- Lec 9Document16 pagesLec 9Saif AlabdullahNo ratings yet
- 6 Resource Levelling PPT 4Document14 pages6 Resource Levelling PPT 4Saif AlabdullahNo ratings yet
- Lecture 8.1 (28-32)Document5 pagesLecture 8.1 (28-32)Saif AlabdullahNo ratings yet
- New Microsoft Word Document PDFDocument2 pagesNew Microsoft Word Document PDFSaif AlabdullahNo ratings yet
- Lecture 3 Distributed Control Systems PDFDocument17 pagesLecture 3 Distributed Control Systems PDFSaif AlabdullahNo ratings yet
- Lecture 1 1-7Document7 pagesLecture 1 1-7Saif AlabdullahNo ratings yet
- Lecture 1-4 PDFDocument26 pagesLecture 1-4 PDFSaif AlabdullahNo ratings yet
- Human Machine Interface (HMI) : Software Programming ComponentsDocument10 pagesHuman Machine Interface (HMI) : Software Programming ComponentsSaif AlabdullahNo ratings yet
- Report PDFDocument12 pagesReport PDFSaif AlabdullahNo ratings yet
- Lect 5 PDFDocument3 pagesLect 5 PDFSaif AlabdullahNo ratings yet
- Lec2 - Programmable Logic Controller PLCDocument11 pagesLec2 - Programmable Logic Controller PLCSaif AlabdullahNo ratings yet
- Report PDFDocument12 pagesReport PDFSaif AlabdullahNo ratings yet
- Lect 2 PDFDocument2 pagesLect 2 PDFSaif AlabdullahNo ratings yet
- Lec2 - Programmable Logic Controller PLCDocument11 pagesLec2 - Programmable Logic Controller PLCSaif AlabdullahNo ratings yet
- Lect 3Document6 pagesLect 3Saif AlabdullahNo ratings yet
- Lec-6 Digital Signal ProcessDocument14 pagesLec-6 Digital Signal ProcessSaif AlabdullahNo ratings yet
- Lecture - 2-1 Digital Signal ProcessDocument14 pagesLecture - 2-1 Digital Signal ProcessSaif AlabdullahNo ratings yet
- Digital Signal Processing: Dr. Saad Muhi FalihDocument15 pagesDigital Signal Processing: Dr. Saad Muhi FalihSaif AlabdullahNo ratings yet
- Digital Signal Processing: Discrete-Time SignalsDocument15 pagesDigital Signal Processing: Discrete-Time SignalsSaif AlabdullahNo ratings yet
- Lec-7 Digital Signal ProcessDocument19 pagesLec-7 Digital Signal ProcessSaif AlabdullahNo ratings yet
- Lec-5 Digital Signal ProcessDocument13 pagesLec-5 Digital Signal ProcessSaif AlabdullahNo ratings yet
- Lecture - 1 Digital Signal ProcessDocument8 pagesLecture - 1 Digital Signal ProcessSaif AlabdullahNo ratings yet
- Digital Signal Processing: Discrete-Time Systems Lecture - 4Document9 pagesDigital Signal Processing: Discrete-Time Systems Lecture - 4Saif AlabdullahNo ratings yet
- Final - WPS PQR 86Document4 pagesFinal - WPS PQR 86Parag WadekarNo ratings yet
- 13Document47 pages13Rohan TirmakheNo ratings yet
- Android TabletsDocument2 pagesAndroid TabletsMarcus McElhaneyNo ratings yet
- Dyna 2000 LiteDocument2 pagesDyna 2000 LiteRNKNo ratings yet
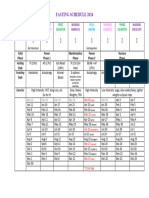
- Moon Fast Schedule 2024Document1 pageMoon Fast Schedule 2024mimiemendoza18No ratings yet
- 5.a Personal Diet Consultant For Healthy MealDocument5 pages5.a Personal Diet Consultant For Healthy MealKishore SahaNo ratings yet
- Laws of ThermocoupleDocument3 pagesLaws of ThermocoupleMourougapragash SubramanianNo ratings yet
- Google Search StringsDocument12 pagesGoogle Search StringsPrashant Sawnani100% (1)
- AIOUDocument2 pagesAIOUHoorabwaseemNo ratings yet
- Jotrun TDSDocument4 pagesJotrun TDSBiju_PottayilNo ratings yet
- One - Pager - SOGEVAC SV 320 BDocument2 pagesOne - Pager - SOGEVAC SV 320 BEOLOS COMPRESSORS LTDNo ratings yet
- Inventory Storage and Retrieval System PatentDocument15 pagesInventory Storage and Retrieval System PatentdevanasokaNo ratings yet
- Project Report On Evaporative CoolerDocument12 pagesProject Report On Evaporative Coolersourabh singh tomerNo ratings yet
- Presepsi Khalayak Terhadap Program Acara Televise Reality Show "Jika Aku Menjadi" Di Trans TVDocument128 pagesPresepsi Khalayak Terhadap Program Acara Televise Reality Show "Jika Aku Menjadi" Di Trans TVAngga DianNo ratings yet
- A61C00100 Communication and Employee Engagement by Mary Welsh 2Document19 pagesA61C00100 Communication and Employee Engagement by Mary Welsh 2Moeshfieq WilliamsNo ratings yet
- Environmental Threats Differentiated Reading Comprehension Ver 1Document20 pagesEnvironmental Threats Differentiated Reading Comprehension Ver 1Camila DiasNo ratings yet
- Pharma TestDocument2 pagesPharma TestMuhammad AdilNo ratings yet
- Akhmatova, Anna - 45 Poems With Requiem PDFDocument79 pagesAkhmatova, Anna - 45 Poems With Requiem PDFAnonymous 6N5Ew3No ratings yet
- Eole Press KitDocument15 pagesEole Press KitBob AndrepontNo ratings yet
- Proposed Panel Antenna: Globe Telecom ProprietaryDocument2 pagesProposed Panel Antenna: Globe Telecom ProprietaryJason QuibanNo ratings yet
- Answer Questions Only: Chemical Engineering DeptDocument2 pagesAnswer Questions Only: Chemical Engineering DepthusseinNo ratings yet
- Best Way To LearnDocument3 pagesBest Way To LearnRAMIZKHAN124No ratings yet
- Presentation of Urban RegenerationsDocument23 pagesPresentation of Urban RegenerationsRafiuddin RoslanNo ratings yet
- SS1c MIDTERMS LearningModuleDocument82 pagesSS1c MIDTERMS LearningModuleBryce VentenillaNo ratings yet
- History and Development of the Foodservice IndustryDocument23 pagesHistory and Development of the Foodservice IndustryMaria Athenna MallariNo ratings yet
- Ktu Students: Principles of ManagementDocument22 pagesKtu Students: Principles of ManagementNidaNo ratings yet
- Fjords Blue Web ENG PDFDocument20 pagesFjords Blue Web ENG PDFMoldovan MirceaNo ratings yet
- United Airlines Case Study: Using Marketing to Address External ChallengesDocument4 pagesUnited Airlines Case Study: Using Marketing to Address External ChallengesSakshiGuptaNo ratings yet
- POPULARITY OF CREDIT CARDS ISSUED BY DIFFERENT BANKSDocument25 pagesPOPULARITY OF CREDIT CARDS ISSUED BY DIFFERENT BANKSNaveed Karim Baksh75% (8)
- Mad LabDocument66 pagesMad LabBalamurugan MNo ratings yet