You might also like
- Servo Motors Types and ApplicationsDocument22 pagesServo Motors Types and ApplicationsLakshman ReddyNo ratings yet
- Neodymium Magnets 1Document25 pagesNeodymium Magnets 1John Paul Patungan100% (1)
- 3.female Reproductive SystemDocument246 pages3.female Reproductive SystemAngel Gabriel Fornillos100% (1)
- CFJV00198BDocument360 pagesCFJV00198BCheongNo ratings yet
- Workshop (02W 1202)Document190 pagesWorkshop (02W 1202)LebahMadu100% (1)
- Regional Security in South Asia and The GulfDocument222 pagesRegional Security in South Asia and The Gulfahmad tajNo ratings yet
- 2023 02 01EatingWellAntioxidantsDocument100 pages2023 02 01EatingWellAntioxidantsCRISTINA ENENo ratings yet
- With Ieee STD Ieee Standard Digital Interface ForDocument144 pagesWith Ieee STD Ieee Standard Digital Interface ForhaythemNo ratings yet
- Manual Motor de Pistones Radiales CB Bosch RexrothDocument48 pagesManual Motor de Pistones Radiales CB Bosch RexrothDavid Jimenez100% (1)
- PLC-Controlled Automated Packaging MachineDocument7 pagesPLC-Controlled Automated Packaging MachineTimothy FieldsNo ratings yet
- Biomedical Engineering Advances: Rumana Islam, Esam Abdel-Raheem, Mohammed TariqueDocument12 pagesBiomedical Engineering Advances: Rumana Islam, Esam Abdel-Raheem, Mohammed TariqueMohammed TariqueNo ratings yet
- Hudi Hatowo - R&D of Alternative Energy in Ina, 27nov06Document28 pagesHudi Hatowo - R&D of Alternative Energy in Ina, 27nov06Agus GunawanNo ratings yet
- ICEE 2021 Proceedings on Energy & EnvironmentDocument192 pagesICEE 2021 Proceedings on Energy & EnvironmentNadirUmmerNo ratings yet
- 2021 COVID-19 Vaccine-Associated Anaphylaxis A Statement of The World Allergy Organization Anaphylaxis CommitteeDocument10 pages2021 COVID-19 Vaccine-Associated Anaphylaxis A Statement of The World Allergy Organization Anaphylaxis CommitteeJOSÉ CARLOS ÁLVAREZ PAYARESNo ratings yet
- The Basics LearnIt WebSAMPLEDocument22 pagesThe Basics LearnIt WebSAMPLEPhong Lê ĐìnhNo ratings yet
- AP Physics C Electricity and Magnetism Course at A GlanceDocument2 pagesAP Physics C Electricity and Magnetism Course at A GlanceJashanbir SinghNo ratings yet
- The Meaning of Dorje Gotrab Wish - Fulfilling Gem Mantra by H.H.Khenchen Lama Rinpoche - The Official Website of His Holiness Khenchen Lama RinpocheDocument8 pagesThe Meaning of Dorje Gotrab Wish - Fulfilling Gem Mantra by H.H.Khenchen Lama Rinpoche - The Official Website of His Holiness Khenchen Lama RinpocheJohn RootNo ratings yet
- Business Partner B2Plus Ex Class Practice WorkSheet - U4Document5 pagesBusiness Partner B2Plus Ex Class Practice WorkSheet - U4Mộc LanNo ratings yet
- Curriculumguide 2324Document35 pagesCurriculumguide 2324api-331852116No ratings yet
- Heresy Floorstanding SpeakerDocument1 pageHeresy Floorstanding Speaker96MysticNo ratings yet
- Managing The Social Determinants of Health Part 1 Fundamntal Knowlegde For Profesional Case ManagementDocument23 pagesManaging The Social Determinants of Health Part 1 Fundamntal Knowlegde For Profesional Case ManagementkritisNo ratings yet
- Doh Mtra PDFDocument8 pagesDoh Mtra PDFElaine DabuNo ratings yet
- Nagisa de DanceDocument9 pagesNagisa de Dancephuong linh phamNo ratings yet
- BIOL 125 001 Course Outline 2014W T2 Hart-ReidDocument10 pagesBIOL 125 001 Course Outline 2014W T2 Hart-Reidtahoora tNo ratings yet
- Loving Objects: Can Autism Explain Objectophilia?Document17 pagesLoving Objects: Can Autism Explain Objectophilia?Sotir Hadzi-NikolovNo ratings yet
- Environment CombinedDocument24 pagesEnvironment CombinedNitin NandaNo ratings yet
- DynaEnergetics Europe v. PerfX Wireless - ComplaintDocument101 pagesDynaEnergetics Europe v. PerfX Wireless - ComplaintSarah BursteinNo ratings yet
- 3 TCW Chapter 3 Regionalization and RegionalismDocument18 pages3 TCW Chapter 3 Regionalization and RegionalismMiya LaideNo ratings yet
- School of Distance Education: Dsma DSMB DSMC DSMD Dsme DSMFDocument13 pagesSchool of Distance Education: Dsma DSMB DSMC DSMD Dsme DSMFbharatNo ratings yet
- V2202 Part-IDocument53 pagesV2202 Part-Izainab jamidNo ratings yet
- Bawang Merah Bawang PutihDocument2 pagesBawang Merah Bawang PutihHuBBy iRaaNo ratings yet
- Senate Bill 2247Document4 pagesSenate Bill 2247inforumdocsNo ratings yet
- YASHU Final Technical Seminar ReportDocument23 pagesYASHU Final Technical Seminar Reportyashwanth vNo ratings yet
- ProjectDocument20 pagesProjectHIMANSHU GOELNo ratings yet
- 5000c Technical Manual Version 1.5Document63 pages5000c Technical Manual Version 1.5eber davidNo ratings yet
- Ielts Speaking Part 1 Questions and Answers Top 50 PDF 63f625be9cDocument8 pagesIelts Speaking Part 1 Questions and Answers Top 50 PDF 63f625be9ctoughpickNo ratings yet
- SBI3U Unit 4 Task 2,3, and 4Document19 pagesSBI3U Unit 4 Task 2,3, and 4Sara SNo ratings yet
- Gibson - An Investigation Into The Historical, Cultural-Religious, Mystical and Doctrinal Elements of Paul's Christology and Soteriology A Theoretical Study oDocument294 pagesGibson - An Investigation Into The Historical, Cultural-Religious, Mystical and Doctrinal Elements of Paul's Christology and Soteriology A Theoretical Study oClaytonNo ratings yet
- Capital Extension (All Muscles Act Bilaterally)Document17 pagesCapital Extension (All Muscles Act Bilaterally)pranjalNo ratings yet
- Biogeography & Ecosystems: Organisms, Interactions & CyclesDocument35 pagesBiogeography & Ecosystems: Organisms, Interactions & CyclesBlessmore Chitanha100% (1)
- Plastics Alternative Study Final Report CompressedDocument158 pagesPlastics Alternative Study Final Report Compressedvikalp123123No ratings yet
- 1807-Vol 3Document26 pages1807-Vol 3BSRNo ratings yet
- Mail Ballot Application For Rhode Island General Election.Document2 pagesMail Ballot Application For Rhode Island General Election.Frank MaradiagaNo ratings yet
- RBIS User Manual - Viewer v1.0Document33 pagesRBIS User Manual - Viewer v1.0JoyceNo ratings yet
- A.D. Pearle - Surgical Technique and Anatomic Study of Latissimus Dorsi and Teres Major Transfers (2006)Document9 pagesA.D. Pearle - Surgical Technique and Anatomic Study of Latissimus Dorsi and Teres Major Transfers (2006)João Pedro ZenattoNo ratings yet
- How To Develop and Construct An Investment PhilosophyDocument104 pagesHow To Develop and Construct An Investment PhilosophyPranab SalianNo ratings yet
- Biology Project File 12thDocument22 pagesBiology Project File 12thNaveen SharmaNo ratings yet
- Working To The Beat - A Self-Regulatory Framework Linking Music Characteristics To Job PerformanceDocument26 pagesWorking To The Beat - A Self-Regulatory Framework Linking Music Characteristics To Job PerformanceMarcelo PinheiroNo ratings yet
- (m7 Main) MusicDocument119 pages(m7 Main) MusicSean RosendoNo ratings yet
- Speaker Vos' Complaint Against Jan. 6th Committee SubpoenaDocument45 pagesSpeaker Vos' Complaint Against Jan. 6th Committee SubpoenaScott HurleyNo ratings yet
- Week 1 Basic Concepts of SystemsDocument52 pagesWeek 1 Basic Concepts of SystemsEvelyn Velasco100% (1)
- Vesak Day: Celebrating Buddha's Birthday, Enlightenment and DeathDocument1 pageVesak Day: Celebrating Buddha's Birthday, Enlightenment and DeathMusinovicNo ratings yet
- DANC254 Example 5Document3 pagesDANC254 Example 5Bambang HariyantoNo ratings yet
- Heights Scotsman Mini Maxi Chiller Instruction Service ManuaDocument11 pagesHeights Scotsman Mini Maxi Chiller Instruction Service ManuaAlejandro PachecoNo ratings yet
- Pro Ramming Massesl CumiramDocument3 pagesPro Ramming Massesl Cumiramashudeva12No ratings yet
- Yaesu FT - 101ZD Survival GuideDocument20 pagesYaesu FT - 101ZD Survival Guide_0379victor_No ratings yet
- AccountingDocument15 pagesAccountingRahul agarwalNo ratings yet
- Guía Fallas para Ricoh Aficio 220Document31 pagesGuía Fallas para Ricoh Aficio 220desechableNo ratings yet
- Brainstorm On Artificial Intelligence Applications and Evaluation of Their Commercial ImpactDocument10 pagesBrainstorm On Artificial Intelligence Applications and Evaluation of Their Commercial ImpactIAES IJAINo ratings yet
- Raptor InstallDocument20 pagesRaptor InstallpaulNo ratings yet
- RevisedDocument7 pagesRevisedOkabe RintarouNo ratings yet
- Instant Fried Cassava (Tigor-Tan) as Food AlternativeDocument22 pagesInstant Fried Cassava (Tigor-Tan) as Food AlternativeHasna watiNo ratings yet
- Atra Jh22 Final-2Document86 pagesAtra Jh22 Final-2Washington ExaminerNo ratings yet
- Bacteriophage T4 Structure and Life CycleDocument17 pagesBacteriophage T4 Structure and Life CycleKiran MishraNo ratings yet
- Thomas Allmer - 978-3-653-01459-4 Via Eduardo SallesDocument137 pagesThomas Allmer - 978-3-653-01459-4 Via Eduardo SallesEBCSNo ratings yet
- GB de PL NL FR Es TR GR CZ Hu Ro HR ItDocument132 pagesGB de PL NL FR Es TR GR CZ Hu Ro HR ItSid Ali RABEHINo ratings yet
- CSS Code ExamplesDocument3 pagesCSS Code Examplesmanju989No ratings yet
- Pomegranate Fruit Quality Assessment Using MachineDocument8 pagesPomegranate Fruit Quality Assessment Using Machinemanju989No ratings yet
- Grading of Pomegranate Using Quality AnalysisDocument9 pagesGrading of Pomegranate Using Quality AnalysisIJRASETPublicationsNo ratings yet
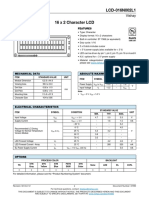
- 16x2 LCDDocument3 pages16x2 LCDYukta DodiaNo ratings yet
- Electrical System: Service Data AlternatorDocument22 pagesElectrical System: Service Data Alternatoreko sunaryoNo ratings yet
- WEG w50 Three Phase Electric Motor Technical Catalogue Iec Market 50044032 Brochure EnglishDocument44 pagesWEG w50 Three Phase Electric Motor Technical Catalogue Iec Market 50044032 Brochure English0403DƯƠNG ĐỨC ĐẠMNo ratings yet
- Tracker DocumentationDocument16 pagesTracker DocumentationIMARNo ratings yet
- Luxel 9000 S.MDocument448 pagesLuxel 9000 S.Mjules RomainNo ratings yet
- Review of Maglev Train Technologies: IEEE Transactions On Magnetics August 2006Document10 pagesReview of Maglev Train Technologies: IEEE Transactions On Magnetics August 2006Vaibhav SharmaNo ratings yet
- Transient Electromechanical Modeling For Short Secondary Linear Induction MachinesDocument7 pagesTransient Electromechanical Modeling For Short Secondary Linear Induction MachinesAnderson Steven Peña SabogalNo ratings yet
- Automated Bottle Filling and Capping Machine Presentation by Beloved MaridzanyereDocument17 pagesAutomated Bottle Filling and Capping Machine Presentation by Beloved MaridzanyereBeloved MaridzanyereNo ratings yet
- Speed Control of Induction Motors Using ThyristorsDocument9 pagesSpeed Control of Induction Motors Using ThyristorsAmit PanditNo ratings yet
- The Dynamics of A Simple Servomechanism For Angular Position ControlDocument2 pagesThe Dynamics of A Simple Servomechanism For Angular Position ControlHaroune DjemaiouneNo ratings yet
- Motion Smarter: Powerful Control Solutions For Demanding Multi-Axis MachineryDocument13 pagesMotion Smarter: Powerful Control Solutions For Demanding Multi-Axis MachineryTofel EmedNo ratings yet
- Dynamic Model of Asynchronous Machine: Conference PaperDocument5 pagesDynamic Model of Asynchronous Machine: Conference PaperMahari MohamedNo ratings yet
- Simulation and Analysis of Modified DTC of PMSMDocument10 pagesSimulation and Analysis of Modified DTC of PMSMpreetivermaeeeNo ratings yet
- Orionbms2 Operational Manual PDFDocument64 pagesOrionbms2 Operational Manual PDFflo72afNo ratings yet
- Catalogue XPower VRFDocument64 pagesCatalogue XPower VRFnglong24No ratings yet
- Multilin 369Document298 pagesMultilin 369Renato AlarconNo ratings yet
- DC Servo Drive: 10V - 30V DC, 50W With ASCII ModbusDocument35 pagesDC Servo Drive: 10V - 30V DC, 50W With ASCII Modbusrajmeet singhNo ratings yet
- TC2-Cross Reference Table For Standards On Rotating MachineryDocument4 pagesTC2-Cross Reference Table For Standards On Rotating MachineryNguyenBaCuocNo ratings yet
- AV485 Smartach Ii: DescriptionDocument7 pagesAV485 Smartach Ii: DescriptionDayhana AbreuNo ratings yet
- Machine Operation Manual NewDocument89 pagesMachine Operation Manual NewPaolo MarinNo ratings yet
- WWW - Manaresults.Co - In: (Electrical and Electronics Engineering)Document2 pagesWWW - Manaresults.Co - In: (Electrical and Electronics Engineering)Parameshwar TummetiNo ratings yet
- JS1000 Concrete MixerDocument5 pagesJS1000 Concrete MixerErik100% (1)
- Binks AgitatorsDocument20 pagesBinks AgitatorsAungThawNyeinChanNo ratings yet
- 1359 5-2004 PDFDocument33 pages1359 5-2004 PDFMark Aspinall - Good Price Cambodia0% (1)
- QSI-335i/370i QSI-440i/500i: Parts ManualDocument88 pagesQSI-335i/370i QSI-440i/500i: Parts ManualJ&CNo ratings yet