You might also like
- External I/O Manual: Kawasaki Robot Controller E SeriesDocument88 pagesExternal I/O Manual: Kawasaki Robot Controller E SeriesAbNo ratings yet
- AD50VT1Document8 pagesAD50VT1Pablo RodriguezNo ratings yet
- Modicon Easy M200 - TM200C40TDocument11 pagesModicon Easy M200 - TM200C40TMaulik MakwanaNo ratings yet
- Lexium 32 & Motors - LXM32AD18N4Document6 pagesLexium 32 & Motors - LXM32AD18N4bozkurtelektrik007No ratings yet
- Lexium 32 & Motors - LXM32MD18N4Document6 pagesLexium 32 & Motors - LXM32MD18N4AlbiPaliqiNo ratings yet
- Lexium 32 & Motors - LXM32MD18N4Document6 pagesLexium 32 & Motors - LXM32MD18N4TONYNo ratings yet
- LXM28AU45M3X: Product Data SheetDocument4 pagesLXM28AU45M3X: Product Data SheetKurdi Stan00No ratings yet
- Lexium 32 & Motors - LXM32MD18M2Document6 pagesLexium 32 & Motors - LXM32MD18M2Muhd SyawalNo ratings yet
- Lexium SD3 & Motors - SD328AU25S2Document10 pagesLexium SD3 & Motors - SD328AU25S2Roberto MontoyaNo ratings yet
- LXM23AU04M3X: Product DatasheetDocument8 pagesLXM23AU04M3X: Product DatasheetCarlos RodasNo ratings yet
- Lxm23au45m3x enDocument10 pagesLxm23au45m3x enKurdi Stan00No ratings yet
- Product Data Sheet: Logic Controller, Modicon M241, 24 IO RelayDocument12 pagesProduct Data Sheet: Logic Controller, Modicon M241, 24 IO RelayRomeo IlieNo ratings yet
- Product Data Sheet: Motion Servo Drive, Lexium 32, Single Phase Supply Voltage 115/230 V, 0.3/0.5 KWDocument6 pagesProduct Data Sheet: Motion Servo Drive, Lexium 32, Single Phase Supply Voltage 115/230 V, 0.3/0.5 KWclaudiomiro_cam_6795No ratings yet
- Idw Document 1480879721997Document4 pagesIdw Document 1480879721997kernaniNo ratings yet
- Idw Document 1480756198492Document3 pagesIdw Document 1480756198492JOSE CABANo ratings yet
- Schneider Electric - Altivar-Process-ATV600 - ATV630D45N4Document16 pagesSchneider Electric - Altivar-Process-ATV600 - ATV630D45N4JohnNo ratings yet
- Product Data Sheet: Motion Servo Drive LXM05A - 2 KW - 380..480 V - 3-Phase - With EMC FilterDocument3 pagesProduct Data Sheet: Motion Servo Drive LXM05A - 2 KW - 380..480 V - 3-Phase - With EMC Filtersamet gozubolNo ratings yet
- ATV23Document3 pagesATV23Vinny RathNo ratings yet
- Altivar Process ATV600 - ATV630D75N4Document13 pagesAltivar Process ATV600 - ATV630D75N4Md. Morshed JahanNo ratings yet
- Altivar Process ATV600 - ATV630D45N4Document13 pagesAltivar Process ATV600 - ATV630D45N4Rabia akramNo ratings yet
- Altivar Process ATV600 - ATV630D90N4Document13 pagesAltivar Process ATV600 - ATV630D90N4Khaled MoncerNo ratings yet
- Product Data Sheet: Logic Controller, Modicon M258, Compact Base 42 I/O, 24 V DC, CanopenDocument7 pagesProduct Data Sheet: Logic Controller, Modicon M258, Compact Base 42 I/O, 24 V DC, CanopenTRITRONIX INDUSTRIAL SOLUTIONNo ratings yet
- Altivar Process ATV900 - ATV930U22N4 PDFDocument13 pagesAltivar Process ATV900 - ATV930U22N4 PDFKolawolé BAKARYNo ratings yet
- Altivar Process ATV900 - ATV930D37N4ZDocument13 pagesAltivar Process ATV900 - ATV930D37N4ZManikandanNo ratings yet
- Altivar Process ATV600 - ATV630C16N4 PDFDocument15 pagesAltivar Process ATV600 - ATV630C16N4 PDFVasil StoianovNo ratings yet
- Altivar Machine ATV320 - ATV320U04N4CDocument10 pagesAltivar Machine ATV320 - ATV320U04N4CMarcelo CorreaNo ratings yet
- Altivar Process ATV900 - ATV930D30N4 PDFDocument13 pagesAltivar Process ATV900 - ATV930D30N4 PDFsofcrow1No ratings yet
- Altivar Process ATV900 - ATV930D90N4Document15 pagesAltivar Process ATV900 - ATV930D90N4Heriberto MoralesNo ratings yet
- Schneider - Electric LXM32MD30M2 DatasheetDocument3 pagesSchneider - Electric LXM32MD30M2 DatasheetBrentildaNo ratings yet
- Schneider Electric - Lexium-23-Plus - LXM23AU20M3XDocument12 pagesSchneider Electric - Lexium-23-Plus - LXM23AU20M3Xtranhuutri1987quangngaiNo ratings yet
- Altivar Process ATV600 - ATV630D30N4Document13 pagesAltivar Process ATV600 - ATV630D30N4YexiongWaherNo ratings yet
- Altivar Process ATV600 - ATV630C16N4Document14 pagesAltivar Process ATV600 - ATV630C16N4Achmad SukmawijayaNo ratings yet
- Altivar Process ATV900 - ATV930C31N4CDocument14 pagesAltivar Process ATV900 - ATV930C31N4CManikandanNo ratings yet
- Altivar Process ATV900 - ATV950D75N4Document13 pagesAltivar Process ATV900 - ATV950D75N4Magda DiazNo ratings yet
- Altivar Process ATV900 - ATV950D37N4Document13 pagesAltivar Process ATV900 - ATV950D37N4movick.25No ratings yet
- Altivar Process ATV600 - ATV630D18N4Document13 pagesAltivar Process ATV600 - ATV630D18N4I PUTU EKA DARMA PARMADINo ratings yet
- Schneider Electric - Altivar-Process-ATV600 - ATV650D75N4Document15 pagesSchneider Electric - Altivar-Process-ATV600 - ATV650D75N4GabrielNo ratings yet
- Altivar Process ATV900 - ATV930D75N4Document14 pagesAltivar Process ATV900 - ATV930D75N4alexis roblesNo ratings yet
- Altivar Machine ATV320 - ATV320U15M3CDocument11 pagesAltivar Machine ATV320 - ATV320U15M3CCarlos AgudeloNo ratings yet
- Altivar Process ATV900 - ATV930C11N4C VFD SchneiderDocument15 pagesAltivar Process ATV900 - ATV930C11N4C VFD SchneiderNISHANNo ratings yet
- Altivar71 HU22N4 - Variabile Speed Drive Atv71-2.2kw 3hp-480vDocument13 pagesAltivar71 HU22N4 - Variabile Speed Drive Atv71-2.2kw 3hp-480vMutu DanielNo ratings yet
- HDM Island ValveDocument10 pagesHDM Island ValvevitgahiNo ratings yet
- Altivar Process ATV900 - ATV9A0C50R4Document4 pagesAltivar Process ATV900 - ATV9A0C50R4edu_bagnoliniNo ratings yet
- Va SB1 30HP Atv630d37n4 FT PDFDocument5 pagesVa SB1 30HP Atv630d37n4 FT PDFCledi GonzalesNo ratings yet
- Link150 EGX150Document3 pagesLink150 EGX150Alexander Lopez VillanuevaNo ratings yet
- Altivar Machine ATV320 ATV320U15M3CDocument10 pagesAltivar Machine ATV320 ATV320U15M3CMarcos ZambranoNo ratings yet
- Altivar Process ATV900 - ATV930D90N4Document14 pagesAltivar Process ATV900 - ATV930D90N4anon_448781499No ratings yet
- Altivar Machine ATV320 - ATV320U04M3CDocument10 pagesAltivar Machine ATV320 - ATV320U04M3CRobie EricssonNo ratings yet
- TM258LF66DT4LDocument7 pagesTM258LF66DT4LEduardo DiazNo ratings yet
- ATV71HC20N4 DocumentDocument8 pagesATV71HC20N4 DocumentToth VasileNo ratings yet
- WWDocument14 pagesWWbrenda2606No ratings yet
- Altivar Machine ATV320 - ATV320U04M2CDocument11 pagesAltivar Machine ATV320 - ATV320U04M2Crahmannafi kurniawanNo ratings yet
- ATV320U07N4C: Product Data SheetDocument11 pagesATV320U07N4C: Product Data SheetBayanaka TehnikNo ratings yet
- Altivar Machine ATV320 - ATV320U06N4BDocument11 pagesAltivar Machine ATV320 - ATV320U06N4Bmasrinaldi.dilalNo ratings yet
- Altivar Machine ATV320 - ATV320U06M2CDocument11 pagesAltivar Machine ATV320 - ATV320U06M2CNguyễn Thiên GiangNo ratings yet
- ATV320U30N4CDocument13 pagesATV320U30N4CCélio Ricci de FreitasNo ratings yet
- Altivar Process ATV900 - ATV930C11N4CDocument15 pagesAltivar Process ATV900 - ATV930C11N4CControl CheckNo ratings yet
- Modicon M241 - TM241C24RDocument12 pagesModicon M241 - TM241C24Rfeinrae3No ratings yet
- LXM23DU07M3X: Product Data SheetDocument10 pagesLXM23DU07M3X: Product Data SheetAshrafNo ratings yet
- Manual ATV320 - ATV320D11N4B-Practico PDFDocument11 pagesManual ATV320 - ATV320D11N4B-Practico PDFMiguel Vargas AguilarNo ratings yet
- Operator's Manual For Spot Welding: Motoman XRC 2001 ControllerDocument387 pagesOperator's Manual For Spot Welding: Motoman XRC 2001 ControllerAbNo ratings yet
- Dvpdnet-Sl: Devicenet Network ScannerDocument44 pagesDvpdnet-Sl: Devicenet Network ScannerAbNo ratings yet
- Altivar 71 - ATV71HC20N4Document14 pagesAltivar 71 - ATV71HC20N4AbNo ratings yet
- Aditya NewDocument2 pagesAditya NewAbNo ratings yet
- Terminal Block and Module Installation GuideDocument2 pagesTerminal Block and Module Installation GuideDaniel CoxNo ratings yet
- Catálogo de Productos TCIDocument108 pagesCatálogo de Productos TCIJaime Forero - jacaforNo ratings yet
- 6 FM 38Document2 pages6 FM 38eddywidjaya9No ratings yet
- System Settings Best Practices TerrainMapper V14.02.2020Document25 pagesSystem Settings Best Practices TerrainMapper V14.02.2020イルヴァン シャーロニNo ratings yet
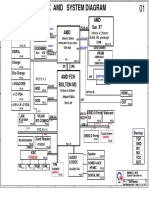
- Amd Amd: +3V/+5V S5 +1.1VS5/+2.5VDocument44 pagesAmd Amd: +3V/+5V S5 +1.1VS5/+2.5VvinuNo ratings yet
- 2N2646 2N2647 Silicon PN Unijunction Transistors DescriptionDocument6 pages2N2646 2N2647 Silicon PN Unijunction Transistors DescriptionTruong Dang VinhNo ratings yet
- Instrument TransformersDocument42 pagesInstrument TransformersZerihun PaulosNo ratings yet
- Jaes V52 3 All PDFDocument220 pagesJaes V52 3 All PDFtimosp1973No ratings yet
- Samsung HT f9750wDocument92 pagesSamsung HT f9750wjampcarlosNo ratings yet
- 15IF11 Multicore C PDFDocument46 pages15IF11 Multicore C PDFRakesh VenkatesanNo ratings yet
- AOC4518R8v06 A154517R0v06: Antenna SpecificationsDocument4 pagesAOC4518R8v06 A154517R0v06: Antenna SpecificationsАлександр0% (1)
- 32-SDMS-11 Rev.1Document56 pages32-SDMS-11 Rev.1Soumya ChaudhuryNo ratings yet
- Mastertig Mls 2300 AcdcDocument24 pagesMastertig Mls 2300 AcdcCesar ObesoNo ratings yet
- UCC28019A 8-Pin Continuous Conduction Mode (CCM) PFC ControllerDocument53 pagesUCC28019A 8-Pin Continuous Conduction Mode (CCM) PFC ControllerАлексей АндрияшNo ratings yet
- THARUN A Task 2Document57 pagesTHARUN A Task 2NANDHAKUMAR ANo ratings yet
- Wiwi Industries Limited: Product Code K02-CCD7601-261018-00ADocument21 pagesWiwi Industries Limited: Product Code K02-CCD7601-261018-00AGaspar GarciaNo ratings yet
- SL2000 - Detector Humo Ducto - Air Products & ControlsDocument2 pagesSL2000 - Detector Humo Ducto - Air Products & ControlsIsabel OrtizNo ratings yet
- 01b OHI ELE483 Fundamentals (Problems) R00Document17 pages01b OHI ELE483 Fundamentals (Problems) R00khaledfilfil.2001No ratings yet
- 19.DG Inspection ChecklistDocument1 page19.DG Inspection ChecklistP.M.K anthNo ratings yet
- 5. Zertifikat-EMC-EN61000-fuer-Huawei-SUN2000-215KTL-H0-WechselrichterDocument2 pages5. Zertifikat-EMC-EN61000-fuer-Huawei-SUN2000-215KTL-H0-WechselrichterSima MadalinaNo ratings yet
- Curiculum Vitae - STDocument3 pagesCuriculum Vitae - STSteven ThoramNo ratings yet
- Module 1 Representation of PU SystemDocument14 pagesModule 1 Representation of PU SystemJay JNo ratings yet
- 09.45 Fabrice RenardDocument25 pages09.45 Fabrice RenardMaintenance PTGSNo ratings yet
- SCALA2-Service Kit InstructionsDocument28 pagesSCALA2-Service Kit InstructionsJanzuar RamadhanyNo ratings yet
- Spyder: EvolvedDocument8 pagesSpyder: EvolvedPLC SwaNo ratings yet
- Types of Transformer Connections and ApplicationDocument59 pagesTypes of Transformer Connections and ApplicationChRis dE Leon100% (1)
- Power Transistors: 20 Amp, 150 V, Double Diffused NPN MesaDocument3 pagesPower Transistors: 20 Amp, 150 V, Double Diffused NPN Mesaenriquevazquez27No ratings yet
- Design An Optimal PI Controller Using Artificial Bee Colony Algorithm For Buck ConverterDocument7 pagesDesign An Optimal PI Controller Using Artificial Bee Colony Algorithm For Buck ConverterAHMAD ASRI ABD SAMATNo ratings yet
- P89C60X2/61X2: 80C51 8-Bit Flash Microcontroller FamilyDocument56 pagesP89C60X2/61X2: 80C51 8-Bit Flash Microcontroller Familyanang suhermanNo ratings yet