You might also like
- "Induction Motor": A Technical Seminar Report OnDocument24 pages"Induction Motor": A Technical Seminar Report OnAmit BansalNo ratings yet
- EES (Lec20)Document16 pagesEES (Lec20)Muhammad SagheerNo ratings yet
- Group 2 Ac Motors Technical ReportDocument12 pagesGroup 2 Ac Motors Technical Reporttristan jeff bautistaNo ratings yet
- Reaction PaperDocument6 pagesReaction PaperAngelo Escoro Dante100% (1)
- Electrical Drives: Content 1. 2. 3. 4. 5. 6. 7. 8. 9Document48 pagesElectrical Drives: Content 1. 2. 3. 4. 5. 6. 7. 8. 9TadeleHaileNo ratings yet
- Electromagnetic Induction: Sardar Patel Institute of Technology 1Document22 pagesElectromagnetic Induction: Sardar Patel Institute of Technology 1krushiNo ratings yet
- Chapter 1: 1-Phase Induction Motor: StatorDocument35 pagesChapter 1: 1-Phase Induction Motor: StatorKhushboo SharmaNo ratings yet
- 1.1 Introduction of Project: 1.1.1 MOTORSDocument37 pages1.1 Introduction of Project: 1.1.1 MOTORSSanjit PanchalNo ratings yet
- Speed Control of Induction Motor Using AnnDocument67 pagesSpeed Control of Induction Motor Using AnnBnr Goud50% (6)
- Term Paper: Subject: Ele 102Document20 pagesTerm Paper: Subject: Ele 102Rajesh VermaNo ratings yet
- Single Phase Induction MotorDocument14 pagesSingle Phase Induction MotorSuvra Pattanayak100% (1)
- AC Motor GuideDocument7 pagesAC Motor GuideAhmed M. MuradNo ratings yet
- Robotic Trolley DesignDocument46 pagesRobotic Trolley DesignSaggy ChhataniNo ratings yet
- ميكاترونكسDocument6 pagesميكاترونكسAhmed M. MuradNo ratings yet
- Induction Machine TrainerDocument29 pagesInduction Machine TrainerBabyNo ratings yet
- CSPDocument8 pagesCSPmeghraj01100% (1)
- Types and Working of 3-Phase Induction MotorsDocument34 pagesTypes and Working of 3-Phase Induction MotorsmuqthiarNo ratings yet
- Lab Rep DraftDocument5 pagesLab Rep DraftKent Orriele FadriquelNo ratings yet
- AC Motor, Servo Motor and Stepper MotorDocument12 pagesAC Motor, Servo Motor and Stepper MotorAhmedSayedNo ratings yet
- Single Phase Induction MotorsDocument11 pagesSingle Phase Induction MotorsSafnas KariapperNo ratings yet
- Advantages and Disadvantages of Single Phase MotorsDocument10 pagesAdvantages and Disadvantages of Single Phase Motorsim always awesome100% (1)
- Induction Motor ReportDocument13 pagesInduction Motor ReportShivani SinghNo ratings yet
- Types of Electric MotorDocument6 pagesTypes of Electric Motorfahad pirzadaNo ratings yet
- Induction Motor: AC Motor GuideDocument7 pagesInduction Motor: AC Motor GuideAbhishek ChibNo ratings yet
- Internship Report Final 66Document17 pagesInternship Report Final 66RaghuNo ratings yet
- Induction MotorDocument20 pagesInduction MotorC V VIJAY KUMASRNo ratings yet
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- Dot 1Document5 pagesDot 1Thomas Nathaniel AngNo ratings yet
- 2 Dc-Motors-3Document69 pages2 Dc-Motors-3JheromeNo ratings yet
- 19P205 Electrical MachinesDocument34 pages19P205 Electrical Machinessumanthlogn007No ratings yet
- Electric Motor Types & WorkingDocument8 pagesElectric Motor Types & WorkingPlutoNo ratings yet
- Ac MotorsDocument12 pagesAc MotorsSUNDAR THANGAPANDINo ratings yet
- Uint 4 BEEDocument17 pagesUint 4 BEEshivprakashNo ratings yet
- Prof. Ajay B. Balar: Darshan Institute of Engineering & Technology, Rajkot (Gujarat)Document34 pagesProf. Ajay B. Balar: Darshan Institute of Engineering & Technology, Rajkot (Gujarat)Rozitarmizi MohammadNo ratings yet
- Single Phase Induction MotorDocument5 pagesSingle Phase Induction MotorDanny JaliusNo ratings yet
- Single Phase Induction MotorsDocument22 pagesSingle Phase Induction MotorsKALYANKOLO UMARUNo ratings yet
- Denso Report FileDocument32 pagesDenso Report FileRahul Pandey75% (4)
- Brushless DC MotorDocument17 pagesBrushless DC Motorkrishna015100% (1)
- Electric Machines: EE-151 Electrical EngineeringDocument21 pagesElectric Machines: EE-151 Electrical EngineeringZeeshan ShakoorNo ratings yet
- Multipurpose Machines Using Scotch Yoke MechanismDocument36 pagesMultipurpose Machines Using Scotch Yoke Mechanismnithinkenator88% (16)
- What Are The Basic Parts of An Induction Motor?Document6 pagesWhat Are The Basic Parts of An Induction Motor?purbasha kanchan ghoshNo ratings yet
- Taguiam ResearchDocument6 pagesTaguiam ResearchKristine BuadaNo ratings yet
- ECEL LAB#3 AngeladaDocument19 pagesECEL LAB#3 AngeladaAlehamarie AngeladaNo ratings yet
- Electrical Motors 2013Document28 pagesElectrical Motors 2013Stephen StewartNo ratings yet
- Single Phase Induction MotorDocument5 pagesSingle Phase Induction MotorSridhar SridharNo ratings yet
- AC Motor - Definition, Working, AC Motor Parts, ApplicationsDocument7 pagesAC Motor - Definition, Working, AC Motor Parts, ApplicationsmanjuNo ratings yet
- Induction Motor Working Principle Types PDFDocument6 pagesInduction Motor Working Principle Types PDFdumpyNo ratings yet
- Induction Motor: Working Principle, Types, &Document6 pagesInduction Motor: Working Principle, Types, &0409piyushNo ratings yet
- Unit-2: (This Unit Covers Criteria P3, P6, M3) Synchronous MotorDocument14 pagesUnit-2: (This Unit Covers Criteria P3, P6, M3) Synchronous MotorMuhja AljaserNo ratings yet
- Ee-120 Ac MachineDocument6 pagesEe-120 Ac Machinesmk30150No ratings yet
- Share ElectricalDocument7 pagesShare ElectricalIsaac Stephen ApenyoNo ratings yet
- Speed Control of 3 Phase Ac Induction Motor Using Micro 2407Document58 pagesSpeed Control of 3 Phase Ac Induction Motor Using Micro 2407sundarspace100% (2)
- Ac Motor Les4Document4 pagesAc Motor Les4Mamadou CissokhoNo ratings yet
- Plant Utilities & Safety: Prime MoversDocument90 pagesPlant Utilities & Safety: Prime Moversaimi wahabNo ratings yet
- Slip Power Recovery of Induction Motor Through Matlab Project ReportDocument33 pagesSlip Power Recovery of Induction Motor Through Matlab Project ReportUtkarsh Agrawal100% (3)
- AC vs DC Motor Components and DifferencesDocument13 pagesAC vs DC Motor Components and DifferencesrikechNo ratings yet
- New Microsoft Word DocumentDocument5 pagesNew Microsoft Word DocumentraviNo ratings yet
- Mr. Mohanbir Singh: TopicDocument6 pagesMr. Mohanbir Singh: TopicGagan BoparaiNo ratings yet
- Lesson Plan Template Department: Branch & Semester: Course Code & Title: Unit Title: CO / Lesson No (GO)Document3 pagesLesson Plan Template Department: Branch & Semester: Course Code & Title: Unit Title: CO / Lesson No (GO)NANDHAKUMAR ANo ratings yet
- Answer Key - 22EE303Document7 pagesAnswer Key - 22EE303NANDHAKUMAR ANo ratings yet
- Chapter-2 Literature ReviewDocument2 pagesChapter-2 Literature ReviewNANDHAKUMAR ANo ratings yet
- Torque Slip Characteristics CurveDocument1 pageTorque Slip Characteristics CurveNANDHAKUMAR ANo ratings yet
- Zeroth ReviewDocument7 pagesZeroth ReviewNANDHAKUMAR ANo ratings yet
- Lesson Plan TemplateDocument2 pagesLesson Plan TemplateNANDHAKUMAR ANo ratings yet
- Moodle2Word Questions - English Template: (18ee703 Electrical Machine Design)Document7 pagesMoodle2Word Questions - English Template: (18ee703 Electrical Machine Design)NANDHAKUMAR ANo ratings yet
- Chapter-2 Literature ReviewDocument2 pagesChapter-2 Literature ReviewNANDHAKUMAR ANo ratings yet
- Moodle2Wordquestions - English Template: (18Ee703-Electrical Machine Design)Document9 pagesMoodle2Wordquestions - English Template: (18Ee703-Electrical Machine Design)NANDHAKUMAR ANo ratings yet
- Single Phase Transformer Phasor DiagramDocument2 pagesSingle Phase Transformer Phasor DiagramNANDHAKUMAR ANo ratings yet
- Stability of Linear Feedback SystemDocument49 pagesStability of Linear Feedback SystemNANDHAKUMAR ANo ratings yet
- Feedback Control Systems AnalysisDocument43 pagesFeedback Control Systems AnalysisSalmaanCadeXaajiNo ratings yet
- Electrical Braking of Three Phase Induct PDFDocument4 pagesElectrical Braking of Three Phase Induct PDFFranc Lami100% (1)
- Lesson PlanDocument3 pagesLesson PlanNANDHAKUMAR ANo ratings yet
- Drives and Actuators Lab TrainingDocument1 pageDrives and Actuators Lab TrainingNANDHAKUMAR ANo ratings yet
- Lesson PlanDocument3 pagesLesson PlanNANDHAKUMAR ANo ratings yet
- Welcome To The Motor-CAD Training PortalDocument4 pagesWelcome To The Motor-CAD Training PortalNANDHAKUMAR ANo ratings yet
- Induction Generator and Linear IMDocument6 pagesInduction Generator and Linear IMNANDHAKUMAR ANo ratings yet
- Welcome To The Motor-CAD Training PortalDocument4 pagesWelcome To The Motor-CAD Training PortalNANDHAKUMAR ANo ratings yet
- 3.1 Summer and Instrumentation AmplifierDocument30 pages3.1 Summer and Instrumentation AmplifierNANDHAKUMAR ANo ratings yet
- Stepper MotorDocument8 pagesStepper MotorNANDHAKUMAR ANo ratings yet
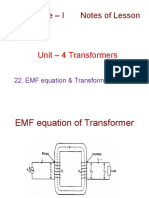
- Emf Equation. Transformation RatioDocument12 pagesEmf Equation. Transformation RatioNANDHAKUMAR ANo ratings yet
- Induction MotorDocument5 pagesInduction MotorNANDHAKUMAR ANo ratings yet
- Open-Circuit or No-Load TestDocument13 pagesOpen-Circuit or No-Load TestNANDHAKUMAR ANo ratings yet
- Equivalent Circuit of Three Phase I.M.Document4 pagesEquivalent Circuit of Three Phase I.M.NANDHAKUMAR ANo ratings yet
- AC and DC Voltage Drop Calculator With Formulas and ExamplesDocument13 pagesAC and DC Voltage Drop Calculator With Formulas and ExamplesNANDHAKUMAR ANo ratings yet
- Torque Slip Characteristics of Induction MotorDocument4 pagesTorque Slip Characteristics of Induction MotorNANDHAKUMAR ANo ratings yet
- For More Visit WWW - Ktunotes.in: LI N E ARM O T O RSDocument23 pagesFor More Visit WWW - Ktunotes.in: LI N E ARM O T O RSNANDHAKUMAR ANo ratings yet
- Single TransformersDocument3 pagesSingle TransformersNANDHAKUMAR ANo ratings yet
- DC Motor Working Principle Explained in 40 CharactersDocument4 pagesDC Motor Working Principle Explained in 40 CharactersNANDHAKUMAR ANo ratings yet
- AMK30103 L1-3 MaterialsDocument8 pagesAMK30103 L1-3 Materialsadeliene 25No ratings yet
- Technological Development of Stirling Cycle EnginesDocument38 pagesTechnological Development of Stirling Cycle EnginesDuy TùngNo ratings yet
- CV of Associate Professor Aftab AlamDocument9 pagesCV of Associate Professor Aftab AlamSupriyo DuttaNo ratings yet
- Experimental Thermal and Fluid Science: Szu Hsien Liu, Rong Fung Huang, Chuang An LinDocument11 pagesExperimental Thermal and Fluid Science: Szu Hsien Liu, Rong Fung Huang, Chuang An LinAli HusseiniNo ratings yet
- SEL-TBD-I-DS-017 - R0 - Data Sheet For MSAI Shutdown Valve - SignDocument4 pagesSEL-TBD-I-DS-017 - R0 - Data Sheet For MSAI Shutdown Valve - SignhadiNo ratings yet
- Mathematics January 2020 Paper 2Document34 pagesMathematics January 2020 Paper 2Tamera Green100% (1)
- Maths JEE Mains 2024 Question Papers With Answer Key PDFDocument11 pagesMaths JEE Mains 2024 Question Papers With Answer Key PDFinfieldirateNo ratings yet
- Anna University Chennai:: Chennai - 600 025 Curriculum 2004 B.Tech. Petroleum EngineeringDocument64 pagesAnna University Chennai:: Chennai - 600 025 Curriculum 2004 B.Tech. Petroleum EngineeringSc Sathish KumarNo ratings yet
- DKK1413 - Chapter 04-1Document37 pagesDKK1413 - Chapter 04-1Salini ShaNo ratings yet
- CR 35-X - Service Manual For DownloadDocument565 pagesCR 35-X - Service Manual For DownloadMohsenNo ratings yet
- Department of Chemistry: CH 102 (Inorganic) : Tutorial No.4Document4 pagesDepartment of Chemistry: CH 102 (Inorganic) : Tutorial No.4Uttam ManasNo ratings yet
- MDR 2 DRH 4189340300i Uk 6852 Taptin0Document26 pagesMDR 2 DRH 4189340300i Uk 6852 Taptin0wan jspNo ratings yet
- How Healing Happens Exploring The Nonlocal GapDocument11 pagesHow Healing Happens Exploring The Nonlocal GapPandaNo ratings yet
- FALLSEM2020-21 MEE1003 TH VL2020210103023 Reference Material I 31-Jul-2020 First Law of Thermodynamics - IIDocument52 pagesFALLSEM2020-21 MEE1003 TH VL2020210103023 Reference Material I 31-Jul-2020 First Law of Thermodynamics - IIRahul rajelliNo ratings yet
- Simulation and Real Time Implementation of Motor Controller For 3ph Induction Motor Using MATLAB and dSPACEDocument11 pagesSimulation and Real Time Implementation of Motor Controller For 3ph Induction Motor Using MATLAB and dSPACEShubham PatilNo ratings yet
- Teq CPL Atg FW 2011 PDFDocument25 pagesTeq CPL Atg FW 2011 PDFkeng ClipperNo ratings yet
- Lesson 29: Integration by Substitution (Worksheet Solutions)Document5 pagesLesson 29: Integration by Substitution (Worksheet Solutions)Matthew Leingang100% (3)
- Questions Bank On ElectrostaticsDocument2 pagesQuestions Bank On Electrostaticsashok PradhanNo ratings yet
- Augereau1998 Article RelevanceOfTheFiniteElementMetDocument4 pagesAugereau1998 Article RelevanceOfTheFiniteElementMetwayanNo ratings yet
- Osman Presentation MSC (Dapped End)Document40 pagesOsman Presentation MSC (Dapped End)osmansparkNo ratings yet
- Sturm AW97I22N Protel Schematic & Footprints & PCB PictureDocument5 pagesSturm AW97I22N Protel Schematic & Footprints & PCB PicturehosseinarevanNo ratings yet
- Masibus 8208 User ManualDocument42 pagesMasibus 8208 User ManualMẫn NguyễnNo ratings yet
- Gates Belts PDFDocument65 pagesGates Belts PDFMamta RaybageNo ratings yet
- Hanbell MPV Valve Spec SheetDocument1 pageHanbell MPV Valve Spec SheetDũng LêNo ratings yet
- LIFTING LUG DESIGN CALCULATIONDocument12 pagesLIFTING LUG DESIGN CALCULATIONsurefooted1No ratings yet
- AC Assignment QuestionsDocument3 pagesAC Assignment QuestionsSudarshanNo ratings yet
- Volume TableDocument2 pagesVolume TableMARINELA CademiaNo ratings yet
- Gas Leak Alarm Systems PDFDocument87 pagesGas Leak Alarm Systems PDFAvYlashKumbharNo ratings yet
- C7012A, C, E, F, G Solid State Purple Peeper® Ultraviolet Flame DetectorsDocument20 pagesC7012A, C, E, F, G Solid State Purple Peeper® Ultraviolet Flame DetectorsMauricio GuanellaNo ratings yet
- Adaptive Multi-Hypar Structure - Feray MadenDocument19 pagesAdaptive Multi-Hypar Structure - Feray MadenJasper paxtonNo ratings yet