You might also like
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Special Electrical Machines Ee2403 PDFDocument16 pagesSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Linear MotorDocument34 pagesLinear Motorstallone21No ratings yet
- 787 Full Flight Tutorial: 1. Route InformationDocument45 pages787 Full Flight Tutorial: 1. Route Informationmadyson12383% (6)
- Dacia Duster 4x4 Aro 10 Brosura PrezentareDocument4 pagesDacia Duster 4x4 Aro 10 Brosura Prezentareadytt20005155No ratings yet
- Interview Questions Electrical EnggDocument21 pagesInterview Questions Electrical Enggwelcome2twinkle_2272100% (1)
- Application of DC Shunt MotorDocument5 pagesApplication of DC Shunt MotorPrajwal Deep RaiNo ratings yet
- Linear Induction MotorDocument3 pagesLinear Induction MotorSourav KumarNo ratings yet
- Interview QuestionDocument49 pagesInterview Questionshubha christopherNo ratings yet
- AC and DC Voltage Drop Calculator With Formulas and ExamplesDocument13 pagesAC and DC Voltage Drop Calculator With Formulas and ExamplesNANDHAKUMAR ANo ratings yet
- Plant Utilities & Safety: Prime MoversDocument90 pagesPlant Utilities & Safety: Prime Moversaimi wahabNo ratings yet
- Electrical Machines: Induction Motors & Synchronous MachinesDocument42 pagesElectrical Machines: Induction Motors & Synchronous MachinesYoshua DylanNo ratings yet
- 5 Bridge N Tunnel - Lecture 71 PDFDocument103 pages5 Bridge N Tunnel - Lecture 71 PDFGajendra Joshi100% (1)
- DepEd Order No. 22 s.2019 TravelDocument11 pagesDepEd Order No. 22 s.2019 TravelElmer CerillaNo ratings yet
- "Relations and Runes: The Baltic Islands and Their Interactions During The Late Iron Age and Early Middle Ages" (2020)Document183 pages"Relations and Runes: The Baltic Islands and Their Interactions During The Late Iron Age and Early Middle Ages" (2020)Before AfterNo ratings yet
- SAIC-Q-1044 Asphalt Paving Final InspectionDocument3 pagesSAIC-Q-1044 Asphalt Paving Final InspectionAbdul HannanNo ratings yet
- Principle of Operation of Synchronous Generator - Saravanan T YDocument21 pagesPrinciple of Operation of Synchronous Generator - Saravanan T YStephanie Pena100% (5)
- Magnetic Levitation Magnetic LevitationDocument6 pagesMagnetic Levitation Magnetic LevitationAnanth Sai YadavNo ratings yet
- Petrobras 1Document52 pagesPetrobras 1xxx100% (1)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Unit 5 LicDocument13 pagesUnit 5 LicRiskKumrNo ratings yet
- Unit5 LMDocument13 pagesUnit5 LMsatyakar_vvkNo ratings yet
- Induction Generator & Linear MotorDocument21 pagesInduction Generator & Linear Motorpartha DasNo ratings yet
- Linear Induction Motor: A Report OnDocument17 pagesLinear Induction Motor: A Report OnUtsav GoyalNo ratings yet
- Maglev Train Design and PLC ControlDocument68 pagesMaglev Train Design and PLC ControlmakrandnkulkarniNo ratings yet
- Induction MotorDocument20 pagesInduction MotorVenkata SubramanianNo ratings yet
- Notes of CH 2 TractionDocument9 pagesNotes of CH 2 Tractionbagathariya dharaNo ratings yet
- Unit - 3 PDFDocument17 pagesUnit - 3 PDFShock SignalNo ratings yet
- DC Analitic SystemDocument6 pagesDC Analitic SystemDobai SzilardNo ratings yet
- Presentation1 SeminarDocument18 pagesPresentation1 SeminarSatyabrataPradhanNo ratings yet
- Recent Development of Linear Machine Topologies and Applications - LuDocument8 pagesRecent Development of Linear Machine Topologies and Applications - LuJuan Andres SalvadorNo ratings yet
- Armature (Electrical Engineering) - Wikipedia, The Free EncyclopediaDocument3 pagesArmature (Electrical Engineering) - Wikipedia, The Free EncyclopediaChytra DivakarNo ratings yet
- EEDocument2 pagesEErayllene.puebloNo ratings yet
- Driving Without WheelsDocument14 pagesDriving Without WheelsSen AnushaNo ratings yet
- Development of Electric Drives in Light Rail Transit (LRT) SystemDocument31 pagesDevelopment of Electric Drives in Light Rail Transit (LRT) SystemArjun Pratap Singh100% (1)
- Electrical Drives: Content 1. 2. 3. 4. 5. 6. 7. 8. 9Document48 pagesElectrical Drives: Content 1. 2. 3. 4. 5. 6. 7. 8. 9TadeleHaileNo ratings yet
- Unesco - Eolss Sample Chapters: Synchronous MachinesDocument7 pagesUnesco - Eolss Sample Chapters: Synchronous Machinescharleselitb92No ratings yet
- Q1. What Do You Mean by Harmonics?Document3 pagesQ1. What Do You Mean by Harmonics?vinesh_viswanathan_3No ratings yet
- Electromagnetic Induction FaradayDocument9 pagesElectromagnetic Induction FaradayAndu GheorgheNo ratings yet
- Electrical Machines - Ii E 602Document15 pagesElectrical Machines - Ii E 602sukhendu_debbarmaNo ratings yet
- "Driving Without Wheels, Flying Without Wings": (Magnetic Levitation)Document15 pages"Driving Without Wheels, Flying Without Wings": (Magnetic Levitation)Boreda RahulNo ratings yet
- Special Motors AssignmentDocument11 pagesSpecial Motors Assignmentnelis01No ratings yet
- DC Motors ExplainedDocument10 pagesDC Motors ExplainedJohna Mae Dolar EtangNo ratings yet
- ALTERNATOR TITLEDocument23 pagesALTERNATOR TITLEpremameNo ratings yet
- Unit 3Document19 pagesUnit 3Monika GNo ratings yet
- LIM WorkingDocument5 pagesLIM WorkingSK VISHNUNo ratings yet
- Share ElectricalDocument7 pagesShare ElectricalIsaac Stephen ApenyoNo ratings yet
- 1.1 Introduction To Basic Piezoelectric MotorDocument5 pages1.1 Introduction To Basic Piezoelectric MotorAshutosh KumarNo ratings yet
- Sensorlees SpeedDocument41 pagesSensorlees Speedvinay999100% (2)
- Engineering QuestionsDocument31 pagesEngineering QuestionsRizwan ShahidNo ratings yet
- Application of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEDocument5 pagesApplication of DC Shunt Motor: Lovely Professional University Amit Raj ROLL NO-RB4802A28 Reg. No-10803543 B.Tech - MEshailesh singhNo ratings yet
- DC MotorDocument14 pagesDC MotorShreyash SargarNo ratings yet
- Rotating Machines Basic ConceptsDocument21 pagesRotating Machines Basic ConceptsArunabh BhattacharyaNo ratings yet
- Em Ii PDFDocument76 pagesEm Ii PDFRavi SharmaNo ratings yet
- ArmatureDocument3 pagesArmatureJORDAN FREENo ratings yet
- AC Machine Course OutcomesDocument19 pagesAC Machine Course OutcomesFred RotichNo ratings yet
- Written Pole TechnologyDocument21 pagesWritten Pole TechnologySwagat PradhanNo ratings yet
- Eddy Current BrakeDocument5 pagesEddy Current BrakeHanafy MahmoudNo ratings yet
- Electromagnetic, Thermal, Static and Microprocessor RelaysDocument11 pagesElectromagnetic, Thermal, Static and Microprocessor RelaysSoumajit PoddarNo ratings yet
- DC MotorDocument21 pagesDC MotorSameera MadhushankaNo ratings yet
- MAGLEV - Magnetic Levitation TechnologyDocument25 pagesMAGLEV - Magnetic Levitation TechnologyAyanBiswas22No ratings yet
- Dual Side Double Acting Water Pumping System Using Scotch Yoke MechanismDocument16 pagesDual Side Double Acting Water Pumping System Using Scotch Yoke MechanismGera workuNo ratings yet
- Magnetic Leviation: MaglevDocument27 pagesMagnetic Leviation: MaglevAjay Kumar DasNo ratings yet
- Interview Questions: Collected by Asif AhmedDocument15 pagesInterview Questions: Collected by Asif Ahmedashish sahaNo ratings yet
- Servo Control Facts: Baldor Electric CompanyDocument24 pagesServo Control Facts: Baldor Electric CompanyRizwan HameedNo ratings yet
- Everything You Need to Know About Servo ControlDocument24 pagesEverything You Need to Know About Servo Controlafe2000must9083No ratings yet
- 3 DC GeneratorsDocument51 pages3 DC GeneratorsJheromeNo ratings yet
- Servo MechanismDocument24 pagesServo Mechanismmushahid980No ratings yet
- Moodle2Word Questions - English Template: (18ee703 Electrical Machine Design)Document7 pagesMoodle2Word Questions - English Template: (18ee703 Electrical Machine Design)NANDHAKUMAR ANo ratings yet
- Answer Key - 22EE303Document7 pagesAnswer Key - 22EE303NANDHAKUMAR ANo ratings yet
- Chapter-2 Literature ReviewDocument2 pagesChapter-2 Literature ReviewNANDHAKUMAR ANo ratings yet
- Torque Slip Characteristics CurveDocument1 pageTorque Slip Characteristics CurveNANDHAKUMAR ANo ratings yet
- Zeroth ReviewDocument7 pagesZeroth ReviewNANDHAKUMAR ANo ratings yet
- Lesson Plan TemplateDocument2 pagesLesson Plan TemplateNANDHAKUMAR ANo ratings yet
- Moodle2Wordquestions - English Template: (18Ee703-Electrical Machine Design)Document9 pagesMoodle2Wordquestions - English Template: (18Ee703-Electrical Machine Design)NANDHAKUMAR ANo ratings yet
- Chapter-2 Literature ReviewDocument2 pagesChapter-2 Literature ReviewNANDHAKUMAR ANo ratings yet
- Lesson Plan Template Department: Branch & Semester: Course Code & Title: Unit Title: CO / Lesson No (GO)Document3 pagesLesson Plan Template Department: Branch & Semester: Course Code & Title: Unit Title: CO / Lesson No (GO)NANDHAKUMAR ANo ratings yet
- Single Phase Transformer Phasor DiagramDocument2 pagesSingle Phase Transformer Phasor DiagramNANDHAKUMAR ANo ratings yet
- Stability of Linear Feedback SystemDocument49 pagesStability of Linear Feedback SystemNANDHAKUMAR ANo ratings yet
- Feedback Control Systems AnalysisDocument43 pagesFeedback Control Systems AnalysisSalmaanCadeXaajiNo ratings yet
- Electrical Braking of Three Phase Induct PDFDocument4 pagesElectrical Braking of Three Phase Induct PDFFranc Lami100% (1)
- Lesson PlanDocument3 pagesLesson PlanNANDHAKUMAR ANo ratings yet
- Drives and Actuators Lab TrainingDocument1 pageDrives and Actuators Lab TrainingNANDHAKUMAR ANo ratings yet
- Lesson PlanDocument3 pagesLesson PlanNANDHAKUMAR ANo ratings yet
- Welcome To The Motor-CAD Training PortalDocument4 pagesWelcome To The Motor-CAD Training PortalNANDHAKUMAR ANo ratings yet
- Equivalent Circuit of Three Phase I.M.Document4 pagesEquivalent Circuit of Three Phase I.M.NANDHAKUMAR ANo ratings yet
- Welcome To The Motor-CAD Training PortalDocument4 pagesWelcome To The Motor-CAD Training PortalNANDHAKUMAR ANo ratings yet
- 3.1 Summer and Instrumentation AmplifierDocument30 pages3.1 Summer and Instrumentation AmplifierNANDHAKUMAR ANo ratings yet
- Stepper MotorDocument8 pagesStepper MotorNANDHAKUMAR ANo ratings yet
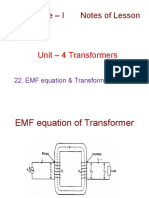
- Emf Equation. Transformation RatioDocument12 pagesEmf Equation. Transformation RatioNANDHAKUMAR ANo ratings yet
- Induction MotorDocument5 pagesInduction MotorNANDHAKUMAR ANo ratings yet
- Open-Circuit or No-Load TestDocument13 pagesOpen-Circuit or No-Load TestNANDHAKUMAR ANo ratings yet
- Induction Generator and Linear IMDocument6 pagesInduction Generator and Linear IMNANDHAKUMAR ANo ratings yet
- Torque Slip Characteristics of Induction MotorDocument4 pagesTorque Slip Characteristics of Induction MotorNANDHAKUMAR ANo ratings yet
- DC Motor Working Principle Explained in 40 CharactersDocument4 pagesDC Motor Working Principle Explained in 40 CharactersNANDHAKUMAR ANo ratings yet
- Single TransformersDocument3 pagesSingle TransformersNANDHAKUMAR ANo ratings yet
- Lecture: Structure and Functions of LipidsDocument7 pagesLecture: Structure and Functions of LipidslaceyNo ratings yet
- Goodsense FD50 60 70 80 Diesel Forklift SpecDocument1 pageGoodsense FD50 60 70 80 Diesel Forklift SpecMatiasNo ratings yet
- Drilling Rig SpecificationsDocument2 pagesDrilling Rig Specificationslorenzo henerNo ratings yet
- Ui Sc180rev4Document9 pagesUi Sc180rev4Maan MrabetNo ratings yet
- Briefer On The LPTRP of Butuan CityDocument2 pagesBriefer On The LPTRP of Butuan Cityclinton john minglanaNo ratings yet
- Fairfox Ryed CastrudesDocument19 pagesFairfox Ryed Castrudesrussell apura galvezNo ratings yet
- Syllabus - For - All Grade Deck Side PDFDocument8 pagesSyllabus - For - All Grade Deck Side PDFGaurav pNo ratings yet
- Pipe Bend Standard PDFDocument4 pagesPipe Bend Standard PDFDhim131267No ratings yet
- Bus Terminal ThesisDocument5 pagesBus Terminal Thesisgjd6bfa4100% (2)
- Schedule For PrimaveraDocument4 pagesSchedule For PrimaveraSyafawani SyazyraNo ratings yet
- A Study of The Brooklyn Bridge PDFDocument10 pagesA Study of The Brooklyn Bridge PDFJuan HuamánNo ratings yet
- chuyên đề 21 300 CÂU TÌM LỖI SAI VÀO 10Document13 pageschuyên đề 21 300 CÂU TÌM LỖI SAI VÀO 10Hiếu Đỗ Nguyễn NgọcNo ratings yet
- RFCL ASSISTANT MANAGER (ELECTRICAL) PDFDocument5 pagesRFCL ASSISTANT MANAGER (ELECTRICAL) PDFSwarup NayakNo ratings yet
- Impaired Driving Prevention MonthDocument1 pageImpaired Driving Prevention MonthWWMTNo ratings yet
- Individual Assignment 1Document1 pageIndividual Assignment 1SweetNo ratings yet
- Rev4 3Document97 pagesRev4 3Marija IvanovskaNo ratings yet
- KG Electric Bike and Scooter Trading SEO Optimized TitleDocument1 pageKG Electric Bike and Scooter Trading SEO Optimized TitleKathleen Kae GapuzNo ratings yet
- The Fast and The Furious (2001) PDFDocument100 pagesThe Fast and The Furious (2001) PDFNick LaurNo ratings yet
- Notes For Driving G2Document4 pagesNotes For Driving G2t2cssnqjhrNo ratings yet
- History of PuneDocument64 pagesHistory of PuneAlex LeeNo ratings yet
- A196627 TowtankDocument501 pagesA196627 TowtankHua Hidari YangNo ratings yet
- Glider Portfolio Without PosterDocument8 pagesGlider Portfolio Without Posterapi-107279294No ratings yet
- Aarto 08Document2 pagesAarto 08Giam DewetNo ratings yet