You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- As 1580.0-2004 Paints and Related Materials - Methods of Test - Part 0 Introduction and List of MethodsDocument17 pagesAs 1580.0-2004 Paints and Related Materials - Methods of Test - Part 0 Introduction and List of Methodsardansyahputra0% (2)
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 11Document34 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 11Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 10Document6 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 10Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 13Document19 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 13Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 6Document34 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 6Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 7Document16 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 7Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 15Document42 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 15Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 18Document44 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 18Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 12Document42 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 12Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 16Document7 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 16Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 8Document19 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 8Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 5Document16 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 5Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 1Document21 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 1Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 17Document40 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 17Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 9Document32 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 9Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 3Document31 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 3Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 12Document24 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 12Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 10Document22 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 10Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh-Mig - C - 9Document20 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh-Mig - C - 9Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 5Document15 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 5Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 13Document30 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 13Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 1Document23 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 1Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 3Document15 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 3Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - C - 12Document41 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - C - 12Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh-Mig - C - 8Document7 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh-Mig - C - 8Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 7Document23 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 7Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 4Document20 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 4Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh-Mig - C - 7Document17 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh-Mig - C - 7Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - C - 14Document34 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - C - 14Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - C - 7Document33 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - C - 7Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - C - 6Document24 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - C - 6Tomás BurónNo ratings yet
- ZA550KL RF Hardware Trouble Shooting GuideDocument42 pagesZA550KL RF Hardware Trouble Shooting GuideWenderson FeltrinNo ratings yet
- Recording Studio DesignDocument16 pagesRecording Studio DesignValentino FantiniNo ratings yet
- BinaryDocument2 pagesBinaryAidanNo ratings yet
- Animation Project HosaDocument95 pagesAnimation Project Hosamerwin23No ratings yet
- G23 - Hương - M IDocument4 pagesG23 - Hương - M Ikhanhhoi.clcNo ratings yet
- Evaluasi Tata Kelola Terminal Tipe C Tuah Tualang Di Kabupaten Siak Oleh: Ike Puspita Pembimbing: AdiantoDocument13 pagesEvaluasi Tata Kelola Terminal Tipe C Tuah Tualang Di Kabupaten Siak Oleh: Ike Puspita Pembimbing: AdiantoAshw AswNo ratings yet
- Water Plane ComputationDocument14 pagesWater Plane ComputationAchonk Gio VelenoNo ratings yet
- Developing and Enhancing Competencies in ThepracticeDocument3 pagesDeveloping and Enhancing Competencies in ThepracticeIan Ciputra SitohangNo ratings yet
- Basic Theory of InterestDocument32 pagesBasic Theory of InterestSailesh KondragantiNo ratings yet
- EnglishCore PQ2Document11 pagesEnglishCore PQ2teslaphenom3No ratings yet
- T Rec L.1221 201811 I!!pdf eDocument58 pagesT Rec L.1221 201811 I!!pdf eShahriar AhmedNo ratings yet
- Ralph and Simon (Lord of The Flies)Document3 pagesRalph and Simon (Lord of The Flies)Fatima SiddiqueNo ratings yet
- Year6 Unit7 Lesson PlanDocument21 pagesYear6 Unit7 Lesson PlanMarios KoumallosNo ratings yet
- Periodontal ExodontiaDocument5 pagesPeriodontal ExodontiaDARKS_EDSNo ratings yet
- ALBPDocument68 pagesALBPminh tanNo ratings yet
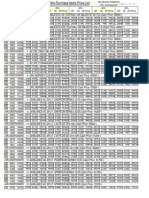
- PriceListHirePurchase Normal3august2020Document69 pagesPriceListHirePurchase Normal3august2020waqar ahmadNo ratings yet
- STC2 KL - Series 20230427Document3 pagesSTC2 KL - Series 20230427roverragzNo ratings yet
- OR SyllabusDocument2 pagesOR SyllabusyogikorramutlaNo ratings yet
- Analysis of Open Source Computing Techniques & Comparison On Cloud-Based ERPDocument7 pagesAnalysis of Open Source Computing Techniques & Comparison On Cloud-Based ERPInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Architecture Instruction Set Extensions Programming ReferenceDocument180 pagesArchitecture Instruction Set Extensions Programming ReferenceAnton ShilovNo ratings yet
- Markov 123Document108 pagesMarkov 123rafeshNo ratings yet
- Referencing TestDocument1 pageReferencing TestHoang Ngoc BichNo ratings yet
- What Is Strategy? Explain The Various Level of Strategy in An OrganizationDocument3 pagesWhat Is Strategy? Explain The Various Level of Strategy in An OrganizationHari Prathap ReddyNo ratings yet
- Assertions: Page 1 of 2Document56 pagesAssertions: Page 1 of 2Chakita ReddyNo ratings yet
- Manual MSE5010Document103 pagesManual MSE5010junniorbsbNo ratings yet
- Telangana Model Schools Bridge Course For Academic Year 2014-15 Subject Wise Schedule For Bridge Course Class: ViDocument3 pagesTelangana Model Schools Bridge Course For Academic Year 2014-15 Subject Wise Schedule For Bridge Course Class: ViRamesh RkNo ratings yet
- Booklet Business Plan 2020 v3.0 Amend As of 021219Document131 pagesBooklet Business Plan 2020 v3.0 Amend As of 021219Zamizan BNo ratings yet
- Installer's Guide: Home Standby GeneratorDocument36 pagesInstaller's Guide: Home Standby GeneratorFabian ZamudioNo ratings yet
- Algorithms: Philip W. L. FongDocument24 pagesAlgorithms: Philip W. L. FongMatthew ScottNo ratings yet