You might also like
- Electronics 11 00139 v2Document20 pagesElectronics 11 00139 v2A.P.K M.L.No ratings yet
- CNN Algorithms Survey on Edge Computing with Reconfigurable HardwareDocument24 pagesCNN Algorithms Survey on Edge Computing with Reconfigurable Hardwarearania313No ratings yet
- Sensor Data Aggregation Using A Cross Layer Framework For Smart City ApplicationsDocument4 pagesSensor Data Aggregation Using A Cross Layer Framework For Smart City ApplicationsAnonymous kw8Yrp0R5rNo ratings yet
- Energy-Efficient Communication Methods in WirelessDocument15 pagesEnergy-Efficient Communication Methods in WirelessNorman FoslyNo ratings yet
- An Energy-Efficient Routing Protocol For The Internet of Things Networks Based On Geographical Location and Link QualityDocument13 pagesAn Energy-Efficient Routing Protocol For The Internet of Things Networks Based On Geographical Location and Link QualityHanaw BabashexNo ratings yet
- Electronics: FPGA Implementation For CNN-Based Optical Remote Sensing Object DetectionDocument24 pagesElectronics: FPGA Implementation For CNN-Based Optical Remote Sensing Object Detection楊凱閔No ratings yet
- Transfer Learning For Object Detection Using State-of-the-Art Deep Neural NetworksDocument7 pagesTransfer Learning For Object Detection Using State-of-the-Art Deep Neural NetworksArebi MohamdNo ratings yet
- D2CRP A Novel Distributed 2-Hop Cluster Routing Protocol For Wireless Sensor NetworksDocument14 pagesD2CRP A Novel Distributed 2-Hop Cluster Routing Protocol For Wireless Sensor NetworksHasib Al-arikiNo ratings yet
- NeuronLink An Efficient Chip-to-Chip Interconnect For Large-Scale Neural Network AcceleratorsDocument13 pagesNeuronLink An Efficient Chip-to-Chip Interconnect For Large-Scale Neural Network Accelerators聂珣No ratings yet
- Data Reduction Algorithm For Correlated Data in The Smart GridDocument15 pagesData Reduction Algorithm For Correlated Data in The Smart Gridrajvi yadavNo ratings yet
- An Application-Specific Protocol Architecture For Wireless Microsensor NetworksDocument11 pagesAn Application-Specific Protocol Architecture For Wireless Microsensor NetworksivanNo ratings yet
- TosDocument18 pagesTosD'new YusufdarmaputraNo ratings yet
- Industrial Internet of Things Driven by SDN Platform For Smart Grid ResiliencyDocument11 pagesIndustrial Internet of Things Driven by SDN Platform For Smart Grid ResiliencyPedrito OrangeNo ratings yet
- Context-Aware and User-Centric Residential Energy ManagementDocument6 pagesContext-Aware and User-Centric Residential Energy Managementrajeshramisetti rajeshNo ratings yet
- An Application-Specific Protocol Architecture For Wireless Microsensor NetworksDocument11 pagesAn Application-Specific Protocol Architecture For Wireless Microsensor Networksvikas chawlaNo ratings yet
- Improved Metaheuristic-Driven Energy-Aware Cluster-Based Routing Scheme For Iot-Assisted Wireless Sensor NetworksDocument19 pagesImproved Metaheuristic-Driven Energy-Aware Cluster-Based Routing Scheme For Iot-Assisted Wireless Sensor Networkssaba kanwalNo ratings yet
- Sensors: Quantization and Deployment of Deep Neural Networks On MicrocontrollersDocument32 pagesSensors: Quantization and Deployment of Deep Neural Networks On MicrocontrollerstptuyenNo ratings yet
- LinkNet - Exploiting Encoder Representations For Efficient Semantic SegmentationDocument5 pagesLinkNet - Exploiting Encoder Representations For Efficient Semantic SegmentationMario Galindo QueraltNo ratings yet
- A Comprehensive Survey On Software-Defined NetworkDocument50 pagesA Comprehensive Survey On Software-Defined NetworkVũ MinhNo ratings yet
- Optimising Deep Learning Split Deployment For IoT Edge NetworksDocument6 pagesOptimising Deep Learning Split Deployment For IoT Edge NetworksmishaNo ratings yet
- Edge Intelligence: On-Demand Deep Learning Model Co-Inference With Device-Edge SynergyDocument6 pagesEdge Intelligence: On-Demand Deep Learning Model Co-Inference With Device-Edge SynergyMochamad Sandi NofiansyahNo ratings yet
- Towards Reconfigurable CNN Accelerator For FPGA ImplementationDocument5 pagesTowards Reconfigurable CNN Accelerator For FPGA ImplementationpalansamyNo ratings yet
- Iot-Based DC/DC Deep Learning Power Converter Control: Real-Time ImplementationDocument10 pagesIot-Based DC/DC Deep Learning Power Converter Control: Real-Time ImplementationMayur ShimpiNo ratings yet
- Real-Time Ssdlite Object Detection On FpgaDocument14 pagesReal-Time Ssdlite Object Detection On FpgaBhaumik ChavdaNo ratings yet
- Optimizing Performance of Convolutional Neural Network Using Computing TechniqueDocument4 pagesOptimizing Performance of Convolutional Neural Network Using Computing TechniqueNguyen Van ToanNo ratings yet
- OrigamiDocument14 pagesOrigamiSarthak GoyalNo ratings yet
- GreenEdge - Joint Green Energy Scheduling and Dynamic Task Offloading in Multi - Tier Edge Computing SystemsDocument14 pagesGreenEdge - Joint Green Energy Scheduling and Dynamic Task Offloading in Multi - Tier Edge Computing SystemsJesus RNo ratings yet
- Fully Parallel Stochastic Computing Hardware Implementation of Convolutional Neural Networks For Edge Computing Applications!Document11 pagesFully Parallel Stochastic Computing Hardware Implementation of Convolutional Neural Networks For Edge Computing Applications!rahul rNo ratings yet
- SDN For Smart Grid SystemsDocument17 pagesSDN For Smart Grid SystemsAashay kauravNo ratings yet
- Electronics 11 00945Document23 pagesElectronics 11 00945cthfmzNo ratings yet
- Distributed Large-Scale Co-Simulation For Iot-Aided Smart Grid ControlDocument10 pagesDistributed Large-Scale Co-Simulation For Iot-Aided Smart Grid ControldikyNo ratings yet
- 1 s2.0 S2213138822001102 MainDocument8 pages1 s2.0 S2213138822001102 MainGuru VelmathiNo ratings yet
- A Deep-Neural-Network-Based Relay Selection Scheme in Wireless-Powered Cognitive Iot NetworksDocument14 pagesA Deep-Neural-Network-Based Relay Selection Scheme in Wireless-Powered Cognitive Iot NetworksprazetyoNo ratings yet
- Computing in The Blink of An Eye: Current Possibilities For Edge Computing and Hardware-Agnostic ProgrammingDocument11 pagesComputing in The Blink of An Eye: Current Possibilities For Edge Computing and Hardware-Agnostic ProgrammingjoseNo ratings yet
- Multi-Agent Deep Reinforcement Learning For Computation Offloading and Interference Coordination in Small Cell NetworksDocument12 pagesMulti-Agent Deep Reinforcement Learning For Computation Offloading and Interference Coordination in Small Cell NetworksfrancisNo ratings yet
- Link 1Document6 pagesLink 1zyk9hfrd6nNo ratings yet
- Distribution Management Systems For Smart Grid Architecture Work Flows and InteroperabilityDocument9 pagesDistribution Management Systems For Smart Grid Architecture Work Flows and InteroperabilitySimo MilenkovićNo ratings yet
- Optimizing VNF Placement in VDC Using MLDocument9 pagesOptimizing VNF Placement in VDC Using MLffwdfwdwfNo ratings yet
- Edge AI: On-Demand Accelerating Deep Neural Network Inference Via Edge ComputingDocument11 pagesEdge AI: On-Demand Accelerating Deep Neural Network Inference Via Edge ComputingAbir SenNo ratings yet
- Edge Controller Placement For Next Generation Wireless Sensor NetworksDocument11 pagesEdge Controller Placement For Next Generation Wireless Sensor NetworksAnonymous Gl4IRRjzNNo ratings yet
- Mtap S 24 04432Document13 pagesMtap S 24 04432R. B.No ratings yet
- Optimal Power Flow-Based Reactive Power Control in Smart Distribution Network Using Real-Time Cyber-Physical Co-Simulation FrameworkDocument14 pagesOptimal Power Flow-Based Reactive Power Control in Smart Distribution Network Using Real-Time Cyber-Physical Co-Simulation FrameworkPratyush PoudelNo ratings yet
- An Efficient Centroid-Based Routing Protocol For Energy Management in WSN-Assisted IoTDocument10 pagesAn Efficient Centroid-Based Routing Protocol For Energy Management in WSN-Assisted IoTAnbazhagan SelvanathanNo ratings yet
- Long-Term Max-Min Fairness Guarantee MechanismDocument68 pagesLong-Term Max-Min Fairness Guarantee MechanismNahidaIqbalNo ratings yet
- VLSI Design of Data Processing Architecture For Wireless Sensor NodesDocument3 pagesVLSI Design of Data Processing Architecture For Wireless Sensor NodesAshokNo ratings yet
- SPINN (MobiCom'20)Document14 pagesSPINN (MobiCom'20)Lulu lalaNo ratings yet
- Accelerated Deep Learning Inference From Constrained Embedded DevicesDocument5 pagesAccelerated Deep Learning Inference From Constrained Embedded DevicesBhargav BhatNo ratings yet
- Ids FuzzyDocument13 pagesIds FuzzyThanujNo ratings yet
- Energy Efficient Cluster Head Selection To Enhance Network Connectivity For Wireless Sensor NetworkDocument5 pagesEnergy Efficient Cluster Head Selection To Enhance Network Connectivity For Wireless Sensor NetworkTiffany BryanNo ratings yet
- High Efficient AI-Based Smart Grid Energy Management and Control SystemDocument20 pagesHigh Efficient AI-Based Smart Grid Energy Management and Control SystemStudy MailNo ratings yet
- Data Compression For Energy Efficient Io PDFDocument4 pagesData Compression For Energy Efficient Io PDFBonita WatiNo ratings yet
- Software-Defined Networking and Its Induction in Cloud Computing A Newer Approach To Networking and Modernizing The CloudDocument10 pagesSoftware-Defined Networking and Its Induction in Cloud Computing A Newer Approach To Networking and Modernizing The CloudInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Bi LSTMDocument12 pagesBi LSTMLiwen HNo ratings yet
- Energy-Aware Routing Algorithms in Software-Defined Networks: June 2014Document7 pagesEnergy-Aware Routing Algorithms in Software-Defined Networks: June 2014gomathiNo ratings yet
- Design of Flexible Hardware Accelerators For Image Convolutions and Transposed ConvolutionsDocument16 pagesDesign of Flexible Hardware Accelerators For Image Convolutions and Transposed ConvolutionsYogeshwar nath singhNo ratings yet
- Dissertation On Wireless Sensor NetworkDocument4 pagesDissertation On Wireless Sensor NetworkDoMyPaperForMoneyDesMoines100% (1)
- Interconnects For DNA, Quantum, In-Memory, and Optical ComputingDocument10 pagesInterconnects For DNA, Quantum, In-Memory, and Optical ComputingThiago SantosNo ratings yet
- City-Wide NB-IoT Network Monitoring and DiagnosingDocument14 pagesCity-Wide NB-IoT Network Monitoring and DiagnosingAbhishek kumar PankajNo ratings yet
- Chen, Hao - Task Offloading For Mobile Edge Computing in Software Defined Ultra-Dense Network - IEEE Journal On Selected Areas in CommunDocument11 pagesChen, Hao - Task Offloading For Mobile Edge Computing in Software Defined Ultra-Dense Network - IEEE Journal On Selected Areas in CommunCornor MikeNo ratings yet
- Embedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingFrom EverandEmbedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingNo ratings yet
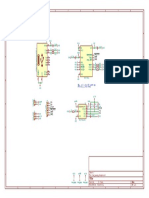
- Schematic Fuel Gauge ChargerDocument1 pageSchematic Fuel Gauge ChargerUmair Ahmadh100% (1)
- CODE 5-2022 Web NEWDocument76 pagesCODE 5-2022 Web NEWUmair AhmadhNo ratings yet
- Project CMPEN 331 Computer Organization and Design - Penn State University - School of Electrical Engineering and Computer ScienceDocument8 pagesProject CMPEN 331 Computer Organization and Design - Penn State University - School of Electrical Engineering and Computer ScienceUmair AhmadhNo ratings yet
- CODE 5-2022 Web NEWDocument76 pagesCODE 5-2022 Web NEWUmair AhmadhNo ratings yet
- 2 Input Output PortsDocument29 pages2 Input Output PortsUmair AhmadhNo ratings yet
- Job Classification Based On Linkedin Summaries Cs 224DDocument6 pagesJob Classification Based On Linkedin Summaries Cs 224DUmair AhmadhNo ratings yet
- Presentation Cover Title: Lorem Ipsum Dolor Sit Amet, Consectetur Adipiscing ElitDocument12 pagesPresentation Cover Title: Lorem Ipsum Dolor Sit Amet, Consectetur Adipiscing ElitUmair AhmadhNo ratings yet
- Schematic PDFDocument1 pageSchematic PDFUmair AhmadhNo ratings yet
- Parts ListDocument2 pagesParts ListUmair AhmadhNo ratings yet
- (Solution Manual by Umair Ahmadh) Computer Netwroks TutorialDocument11 pages(Solution Manual by Umair Ahmadh) Computer Netwroks TutorialUmair AhmadhNo ratings yet
- Assignment 1Document3 pagesAssignment 1Umair AhmadhNo ratings yet
- Group 6 - A Presentation CommunicationDocument22 pagesGroup 6 - A Presentation CommunicationUmair AhmadhNo ratings yet
- Default SRCDocument2 pagesDefault SRCUmair AhmadhNo ratings yet
- Tutorial I - Electrical Machines and DrvesDocument2 pagesTutorial I - Electrical Machines and DrvesUmair AhmadhNo ratings yet
- Lab report on single phase transformersDocument1 pageLab report on single phase transformersUmair AhmadhNo ratings yet
- En 53001 Communication Theory - 3.1 LEctures Slides - DR Abdul HaleemDocument27 pagesEn 53001 Communication Theory - 3.1 LEctures Slides - DR Abdul HaleemUmair AhmadhNo ratings yet
- Carriculum of Electrical and Electronic Enginering in South Eastern University of Sri LankaDocument7 pagesCarriculum of Electrical and Electronic Enginering in South Eastern University of Sri LankaUmair AhmadhNo ratings yet
- Abnormal Psychology Key IssuesDocument15 pagesAbnormal Psychology Key IssuesUmair AhmadhNo ratings yet
- 1772 - Allocation - 2017 PDFDocument2 pages1772 - Allocation - 2017 PDFUmair AhmadhNo ratings yet
- 1772 - Allocation - 2017 PDFDocument2 pages1772 - Allocation - 2017 PDFUmair AhmadhNo ratings yet
- Sri Lanka Telecom Approved Broadband Tariff Packages 2014Document1 pageSri Lanka Telecom Approved Broadband Tariff Packages 2014Umair AhmadhNo ratings yet
- Alternating CurrentDocument15 pagesAlternating CurrentashrafraziNo ratings yet
- Tkinter - Guis in Python: Dan Fleck Cs112 George Mason UniversityDocument49 pagesTkinter - Guis in Python: Dan Fleck Cs112 George Mason UniversityAnh Bien NguyenNo ratings yet
- G.C.E A/L EXAM 2013 Results - GASSALY SAHIB UMAIR AHAMEDDocument1 pageG.C.E A/L EXAM 2013 Results - GASSALY SAHIB UMAIR AHAMEDUmair AhmadhNo ratings yet
- OOP Lab Record DdvdaDocument95 pagesOOP Lab Record DdvdaDevelop with AcelogicNo ratings yet
- CasestudyDocument23 pagesCasestudykrishchitraveniNo ratings yet
- Open Source - Igor Netto - OperaDocument13 pagesOpen Source - Igor Netto - OperaSEE2009No ratings yet
- Ducati Energia Dat Manual 140128 1813 Datpiu User Manual Eng PDFDocument60 pagesDucati Energia Dat Manual 140128 1813 Datpiu User Manual Eng PDFPiero AguilarNo ratings yet
- Create An Excel UserFormDocument11 pagesCreate An Excel UserFormRaul HuayparNo ratings yet
- Install & Train Stable Diffusion with Dreambooth GuideDocument4 pagesInstall & Train Stable Diffusion with Dreambooth GuideAngelo TSKNo ratings yet
- Assignment-1: 1.differentiate Between Data and Information?Document5 pagesAssignment-1: 1.differentiate Between Data and Information?Jagadamba SureshNo ratings yet
- ch2 Introduction To Data Communications PDFDocument80 pagesch2 Introduction To Data Communications PDFMelek KüçükNo ratings yet
- F1C100s Datasheet V1 0 PDFDocument21 pagesF1C100s Datasheet V1 0 PDFmundomusicalmeriaNo ratings yet
- A 09 00012 01 ADocument124 pagesA 09 00012 01 Anikolas1922No ratings yet
- 05 CBCP2101 - Topic01Document6 pages05 CBCP2101 - Topic01nur izanNo ratings yet
- QArm Data SheetDocument2 pagesQArm Data SheetThien MaiNo ratings yet
- Esp8266 Node Mcu Wifi ModuleDocument21 pagesEsp8266 Node Mcu Wifi ModuleFayazNo ratings yet
- Web Development 2021 - A Practical Guide (Traversy Media)Document10 pagesWeb Development 2021 - A Practical Guide (Traversy Media)Papan Sarkar100% (1)
- Work Processes Overview and Troubleshooting (SM51Document54 pagesWork Processes Overview and Troubleshooting (SM51NagaNo ratings yet
- VCS-284 NBU10.x SampleExamDocument5 pagesVCS-284 NBU10.x SampleExamOlguerNo ratings yet
- FunctionPoint GuidelinesDocument10 pagesFunctionPoint Guidelinesdecon3No ratings yet
- Cambridge IGCSE™: Computer Science 0478/12 October/November 2020Document13 pagesCambridge IGCSE™: Computer Science 0478/12 October/November 2020boyredbisonNo ratings yet
- Cp1intro To CDocument57 pagesCp1intro To CV keerthikaNo ratings yet
- Vyzex MPD32 Firmware Upgrade PDFDocument7 pagesVyzex MPD32 Firmware Upgrade PDFjohnnyNo ratings yet
- ITT QuestionsDocument27 pagesITT QuestionsHarun Raaj GuptaNo ratings yet
- JCL Lab PGMDocument17 pagesJCL Lab PGMbadsoft100% (2)
- MigrationManagerAD 8.12 CCU AdminGuideDocument16 pagesMigrationManagerAD 8.12 CCU AdminGuideJoseph SamuelNo ratings yet
- 252 Shortcuts For Microsoft Excel 2016Document5 pages252 Shortcuts For Microsoft Excel 2016Muh Al BurhanuddinNo ratings yet
- Arduino Tutorial OV7670 Camera ModuleDocument18 pagesArduino Tutorial OV7670 Camera ModuleKabilesh CmNo ratings yet
- Verint 20SConfigurator 20user 20guideDocument106 pagesVerint 20SConfigurator 20user 20guideVictor BitarNo ratings yet
- InterviewDocument76 pagesInterviewdodomarocNo ratings yet
- Perl TK TutorialDocument48 pagesPerl TK Tutorialsoumava05No ratings yet