You might also like
- Cheat Sheet ModDocument3 pagesCheat Sheet ModTan Keng HuiNo ratings yet
- SWE17B Operator's ManualDocument105 pagesSWE17B Operator's ManualIisakkiNo ratings yet
- Elastic Lateral Torsional BucklingDocument3 pagesElastic Lateral Torsional BucklingRuchit ParmarNo ratings yet
- Hyundai R140W-7 Electrical SystemDocument52 pagesHyundai R140W-7 Electrical SystemHai Van100% (1)
- CST Whitepaper Modeling Simulation Metamaterial Based Devices Industrial ApplicationsDocument6 pagesCST Whitepaper Modeling Simulation Metamaterial Based Devices Industrial ApplicationsMd Rasheduzzaman Al-AminNo ratings yet
- 11.lube Oil SystemDocument22 pages11.lube Oil Systempepenapao1217100% (1)
- A Precision, Low-Cost Vibrating Sample MagnetometerDocument11 pagesA Precision, Low-Cost Vibrating Sample Magnetometervleventv100% (1)
- Valve Size ManualDocument43 pagesValve Size Manualarthur_toafkNo ratings yet
- TransmisioDocument34 pagesTransmisioWilliams ArayaNo ratings yet
- EXXON IP-10-01-01 Centrifugal PumpsDocument9 pagesEXXON IP-10-01-01 Centrifugal PumpsyerkoNo ratings yet
- Eddycurrentsensor PCB SENSOR 2010Document8 pagesEddycurrentsensor PCB SENSOR 2010Siphesihle NkosiNo ratings yet
- Effect of Cubic Nonlinearity On Auto-Parametrically Amplified Resonant MEMS Mass SensorDocument12 pagesEffect of Cubic Nonlinearity On Auto-Parametrically Amplified Resonant MEMS Mass Sensorg161803No ratings yet
- Local Readout Enhancement For Detuned Signal-Recycling InterferometersDocument10 pagesLocal Readout Enhancement For Detuned Signal-Recycling InterferometersParampreetWaliaNo ratings yet
- Modeling and Experimental Characterization of An Active MEMS Based Force SensorDocument12 pagesModeling and Experimental Characterization of An Active MEMS Based Force Sensorlyes TargantNo ratings yet
- Registration ReportDocument21 pagesRegistration ReportMd Zia KhurshidNo ratings yet
- Review Article: Advances in High-Resolution Microscale Impedance SensorsDocument16 pagesReview Article: Advances in High-Resolution Microscale Impedance SensorsgpaivNo ratings yet
- Review Article: Advances in High-Resolution Microscale Impedance SensorsDocument16 pagesReview Article: Advances in High-Resolution Microscale Impedance SensorsgpaivNo ratings yet
- A High Resolution Capacitive MEMS Force Sensor With Novel Bionic Swallow Comb Arrays For Multiphysics Measurement - 8.5pagesDocument10 pagesA High Resolution Capacitive MEMS Force Sensor With Novel Bionic Swallow Comb Arrays For Multiphysics Measurement - 8.5pagesIbrahim RahimNo ratings yet
- MEMS Magnetic Field Sensor - WikipediaDocument5 pagesMEMS Magnetic Field Sensor - WikipediaHyan GontijoNo ratings yet
- Optik: Venkateswara Rao Kolli, Tupakula Srinivasulu, Gopalkrishna Hegde, T Badrinarayana, Srinivas TalabattulaDocument8 pagesOptik: Venkateswara Rao Kolli, Tupakula Srinivasulu, Gopalkrishna Hegde, T Badrinarayana, Srinivas TalabattulaSeenu IIscNo ratings yet
- Nonlinear Modeling of Low Cost Force SensorsDocument6 pagesNonlinear Modeling of Low Cost Force SensorsLearn ElectronikaNo ratings yet
- Experimental modal analysis of cantilever beam using wireless sensor nodeDocument4 pagesExperimental modal analysis of cantilever beam using wireless sensor noderanjithkrajNo ratings yet
- Finite Element Analysis of Resonant Frequencies in Surface Acoustic Wave DeviceDocument5 pagesFinite Element Analysis of Resonant Frequencies in Surface Acoustic Wave Devicebingwazzup100% (1)
- Design Optimization of SAW Temperature Sensor Based One Port Resonator Using FEM SimulationDocument9 pagesDesign Optimization of SAW Temperature Sensor Based One Port Resonator Using FEM Simulationsashakovalenko51640No ratings yet
- Pb2015 1Document12 pagesPb2015 1Ahsan KhanNo ratings yet
- The Design and Research of A New Kind Small Size Resonator Used in Magnetic Coupling Resonance Wireless Energy Transmission SystemDocument4 pagesThe Design and Research of A New Kind Small Size Resonator Used in Magnetic Coupling Resonance Wireless Energy Transmission SystemOmar Adrian OrtizNo ratings yet
- A Low-Cost Vibrating Sample Magnetometry Based On Audio ComponentsDocument7 pagesA Low-Cost Vibrating Sample Magnetometry Based On Audio Componentsmarcos.robertoNo ratings yet
- IMAC XX Conf S29P05 A Novel Sensor Static Dynamic Force MeasurementDocument7 pagesIMAC XX Conf S29P05 A Novel Sensor Static Dynamic Force Measurementhariprasadr5199No ratings yet
- Some Recent Developments in Acceleration Sensors: George Juraj STEINDocument4 pagesSome Recent Developments in Acceleration Sensors: George Juraj STEINuamiranda3518No ratings yet
- Micro - and Nano Systems Based On Vibrating StructuresDocument8 pagesMicro - and Nano Systems Based On Vibrating StructuresjovinjoNo ratings yet
- ICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaDocument6 pagesICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaFGHUIJNo ratings yet
- Large-Stroke Capacitive MEMS Accelerometer Without Pull-In: Meysam Daeichin, Ronald N. Miles, and Shahrzad TowfighianDocument10 pagesLarge-Stroke Capacitive MEMS Accelerometer Without Pull-In: Meysam Daeichin, Ronald N. Miles, and Shahrzad TowfighianRanjit ReddyNo ratings yet
- Useful MaterialDocument5 pagesUseful MaterialHoney HoneyNo ratings yet
- A Simple Vibrating Sample Magnetometer For Macroscopic SamplesDocument14 pagesA Simple Vibrating Sample Magnetometer For Macroscopic SamplesSATHYAPRIYA RNo ratings yet
- PhysRevLett 131 053803Document6 pagesPhysRevLett 131 053803Marco SIMONENo ratings yet
- Baschirotto 2006Document7 pagesBaschirotto 2006Roby TristiAantoroNo ratings yet
- Im Notes 18me44 m3Document14 pagesIm Notes 18me44 m3Amaresh Movies ASNo ratings yet
- A Novel Microwave Proximity Measurement SystemDocument6 pagesA Novel Microwave Proximity Measurement SystemHatem AbdelrahmanNo ratings yet
- Design of Miniaturized Dual-Band Artificial MagnetDocument10 pagesDesign of Miniaturized Dual-Band Artificial Magnetجناب محمدبلال اکمل صاحبNo ratings yet
- Harshey PaperDocument5 pagesHarshey PaperJYOTI PRAKASHNo ratings yet
- An Analytical Model For Capacitive Pressure Transducers With Circular GeometryDocument9 pagesAn Analytical Model For Capacitive Pressure Transducers With Circular GeometryShuvam5 GuptaNo ratings yet
- Optical characterization of MEMS device motionDocument5 pagesOptical characterization of MEMS device motionPandu KNo ratings yet
- DML Theory and PracticeDocument7 pagesDML Theory and PracticeGoh Chin YuanNo ratings yet
- Tuning MEMS Gyroscope Resonant Frequencies With Electrostatic SpringDocument10 pagesTuning MEMS Gyroscope Resonant Frequencies With Electrostatic SpringshreerangarbrNo ratings yet
- Algorithms of Semiconductor Magnetic Field Sensor Devices Power Consumption MinimizationDocument2 pagesAlgorithms of Semiconductor Magnetic Field Sensor Devices Power Consumption MinimizationGeorge AcostaNo ratings yet
- Suspension Based Single Axis Mems AcclerometerDocument10 pagesSuspension Based Single Axis Mems AcclerometerveenaNo ratings yet
- Piezoresistive Cantilever Beam For Force Sensing in Two DimensionsDocument9 pagesPiezoresistive Cantilever Beam For Force Sensing in Two DimensionsnguyenphucthuanNo ratings yet
- A Compact and Polarization-Insensitive Perfect Metamaterial Absorber For Electromagnetic Energy Harvesting ApplicationDocument5 pagesA Compact and Polarization-Insensitive Perfect Metamaterial Absorber For Electromagnetic Energy Harvesting ApplicationAndres UmañaNo ratings yet
- Uu 30 2009Document5 pagesUu 30 2009Eka Panji SaptaprasetyaNo ratings yet
- Surface Micro Machined AccelerometersDocument10 pagesSurface Micro Machined AccelerometersjamsNo ratings yet
- SHM ArduinmoDocument4 pagesSHM ArduinmoJoão Batista Lamari PalmaNo ratings yet
- Letters: Harnessing Optical Forces in Integrated Photonic CircuitsDocument6 pagesLetters: Harnessing Optical Forces in Integrated Photonic CircuitsSabiran GibranNo ratings yet
- MEMS Energy Harvester Device with Wide Frequency RangeDocument38 pagesMEMS Energy Harvester Device with Wide Frequency RangeGoutam RanaNo ratings yet
- Micromachined Cmos Magnetic Field Sensors With Low-Noise Signal ConditioningDocument4 pagesMicromachined Cmos Magnetic Field Sensors With Low-Noise Signal ConditioningdenghueiNo ratings yet
- Emt 4103 Sensors and Transducers On 17th June Lesson 5Document52 pagesEmt 4103 Sensors and Transducers On 17th June Lesson 5SEAN WALLACENo ratings yet
- Witricity TechDocument5 pagesWitricity TechKaran Bir SinghNo ratings yet
- 5 Variable Capacitance SensorDocument8 pages5 Variable Capacitance SensorBiruk TadesseNo ratings yet
- Development Land Application Mass Sensors Based On Flexural Resonances in Alumina BeamsDocument8 pagesDevelopment Land Application Mass Sensors Based On Flexural Resonances in Alumina BeamspandyyanNo ratings yet
- Sensors 19 01149 With CoverDocument15 pagesSensors 19 01149 With CoverTinus NasaNo ratings yet
- Electrical Capacitance TomographyDocument5 pagesElectrical Capacitance TomographySreeraj RajendranNo ratings yet
- 3-D FEM Modeling of Reactor NoiseDocument5 pages3-D FEM Modeling of Reactor NoisePaulo H TavaresNo ratings yet
- Wygant 2018Document9 pagesWygant 2018morris.goe.deNo ratings yet
- Contribution 164Document6 pagesContribution 164Alberto Aspás VenegasNo ratings yet
- Scanning Probe Microscope Dimensional Metrology at Nist: Home Search Collections Journals About Contact Us My IopscienceDocument12 pagesScanning Probe Microscope Dimensional Metrology at Nist: Home Search Collections Journals About Contact Us My IopscienceubuyukduruNo ratings yet
- A Dual Stopband Two-Sided Frequency Selective SurfDocument11 pagesA Dual Stopband Two-Sided Frequency Selective SurfpikothemanNo ratings yet
- Circuit Modeling Methodology For UWB Omnidirectional Small AntennasDocument7 pagesCircuit Modeling Methodology For UWB Omnidirectional Small AntennasDr-Gurpreet KumarNo ratings yet
- AeromechanicsofPassiveRotationinFlappingFlight WoodDocument24 pagesAeromechanicsofPassiveRotationinFlappingFlight WoodAsnide ArmadaNo ratings yet
- BodyTorqueModulationForAMicroroboticFly Finio WoodDocument8 pagesBodyTorqueModulationForAMicroroboticFly Finio WoodAsnide ArmadaNo ratings yet
- AReviewofActuationandPowerElectronicsOptionsforFlapping-WingRoboticInsects Karpelson Wei WoodDocument8 pagesAReviewofActuationandPowerElectronicsOptionsforFlapping-WingRoboticInsects Karpelson Wei WoodAsnide ArmadaNo ratings yet
- ActuatorDocument13 pagesActuatorAsnide ArmadaNo ratings yet
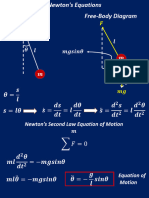
- Simple Pendulum Modelling Simulation 1686477167Document12 pagesSimple Pendulum Modelling Simulation 1686477167durssiNo ratings yet
- Mechanics of Materials 7th Edition Beer Solutions Manual 1Document136 pagesMechanics of Materials 7th Edition Beer Solutions Manual 1kimberly100% (45)
- Válvula-de-gas-NPT-V88J1006Document4 pagesVálvula-de-gas-NPT-V88J1006ycrnsfNo ratings yet
- Design and Analysis of High Pressure Door With Stiffened PlateDocument12 pagesDesign and Analysis of High Pressure Door With Stiffened PlateSyed Faiz Quadri100% (1)
- Midterms 1.2Document1 pageMidterms 1.2Jehana NaolNo ratings yet
- MGS0900B (MG HC6J)Document4 pagesMGS0900B (MG HC6J)niesandNo ratings yet
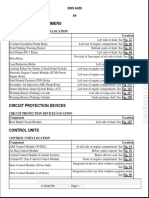
- 02 Electrical Component LocatorDocument86 pages02 Electrical Component LocatordutraneftaliNo ratings yet
- BATCH SETTLING OF SOLID SLURRIES: MOTIVATION, OBJECTIVES, THEORY, EXPERIMENTAL PROCEDURE AND CALCULATIONDocument25 pagesBATCH SETTLING OF SOLID SLURRIES: MOTIVATION, OBJECTIVES, THEORY, EXPERIMENTAL PROCEDURE AND CALCULATIONSUYASH SUNIL ABNAVE PGP 2020 BatchNo ratings yet
- K.P Theory of Energy Bands, Wave Functions, and Optical Selection Rules in Strained Tetrahedral SemiconductorsDocument10 pagesK.P Theory of Energy Bands, Wave Functions, and Optical Selection Rules in Strained Tetrahedral SemiconductorsPeter EndersNo ratings yet
- GT Datasheet AmerKleen M80Document2 pagesGT Datasheet AmerKleen M80Al Gusto Tequeños y MasNo ratings yet
- PHY4 June 2005Document2 pagesPHY4 June 2005api-3726022No ratings yet
- TRC Unit SpecDocument12 pagesTRC Unit SpecJohn ChirinosNo ratings yet
- VW Evrovan MaintenanceDocument142 pagesVW Evrovan MaintenanceNick P100% (1)
- Viva Quastions SegwayDocument11 pagesViva Quastions SegwayEr Md AamirNo ratings yet
- Ladder PDFDocument144 pagesLadder PDFAung MinsoeNo ratings yet
- VG602Document2 pagesVG602LucasNo ratings yet
- Technic parts list with missing itemsDocument12 pagesTechnic parts list with missing itemsrlobetNo ratings yet
- Nasa-Std-5019 (A) 2016-02-01Document119 pagesNasa-Std-5019 (A) 2016-02-01MAI_QualityNo ratings yet
- Mixed Convection Inside A Lid-Driven ParDocument6 pagesMixed Convection Inside A Lid-Driven ParNamanNo ratings yet
- Gravitation NotesDocument3 pagesGravitation NotesrajeshdraneNo ratings yet
- 2006 File 4Document85 pages2006 File 4eurospeed2No ratings yet
- CalcManualGoldEng Dentadas PDFDocument72 pagesCalcManualGoldEng Dentadas PDFGabriel AraujoNo ratings yet