You might also like
- Automotive ComputersDocument25 pagesAutomotive ComputersBruce LyndeNo ratings yet
- Oracle Health CheckDocument2 pagesOracle Health CheckK Kunal RajNo ratings yet
- Fault Tree AnalysisDocument94 pagesFault Tree AnalysisSaid A Attia100% (11)
- Day6 DFSSDocument121 pagesDay6 DFSSPaul StarkNo ratings yet
- ELEC3300 06 InterruptDocument38 pagesELEC3300 06 InterruptKeith wongNo ratings yet
- 28 Hw5-SolDocument18 pages28 Hw5-Solkisibongdem1412No ratings yet
- T24 Updater SetupDocument14 pagesT24 Updater SetupKirsonNo ratings yet
- Centera Online Help (Printable Version) 3.0 A01Document355 pagesCentera Online Help (Printable Version) 3.0 A01n_najjar85No ratings yet
- Lecture-1 ARM Cortex M4-Based System PDFDocument36 pagesLecture-1 ARM Cortex M4-Based System PDFAnandNo ratings yet
- NPTEL CC Assignment2Document4 pagesNPTEL CC Assignment2Paul StarkNo ratings yet
- NPTEL CC Assignment3-1Document4 pagesNPTEL CC Assignment3-1Paul Stark100% (2)
- Machine Cycle and Memory TypesDocument37 pagesMachine Cycle and Memory TypesAravind YadavNo ratings yet
- NPTEL CC Assignment4Document4 pagesNPTEL CC Assignment4Paul Stark100% (1)
- NPTEL Online Certification Cloud Computing Week 1 MCQDocument4 pagesNPTEL Online Certification Cloud Computing Week 1 MCQPaul StarkNo ratings yet
- NPTEL CC Assignment12Document4 pagesNPTEL CC Assignment12Paul Stark50% (2)
- Module 12345Document110 pagesModule 12345Paul StarkNo ratings yet
- Chapter3 Memory System1Document47 pagesChapter3 Memory System1Elias HedamoNo ratings yet
- ELEC3300 10-Memory InterfaceDocument35 pagesELEC3300 10-Memory InterfaceKwun Hok ChongNo ratings yet
- Computer Organization and Architecture: Internal MemoryDocument49 pagesComputer Organization and Architecture: Internal MemoryCông PhạmNo ratings yet
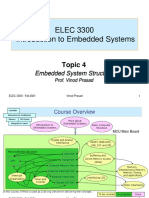
- ELEC3300 - 04-Embedded System StructureDocument47 pagesELEC3300 - 04-Embedded System StructureKeith wongNo ratings yet
- ES Concepts Part 2Document14 pagesES Concepts Part 2nmpzyfgzgnNo ratings yet
- EE 371 Microprocessor Systems: Lecture 1: Introduction, Embedded Systems, ARM ProgrammingDocument31 pagesEE 371 Microprocessor Systems: Lecture 1: Introduction, Embedded Systems, ARM ProgrammingMuhammad Junaid AlviNo ratings yet
- Architecture and components of Computer System: Memory ClassificationDocument14 pagesArchitecture and components of Computer System: Memory Classificationtestscribd9898No ratings yet
- Embedded SystemsDocument11 pagesEmbedded SystemsSahil SiwatchNo ratings yet
- Micro-Controller: Emergers TechnologiesDocument21 pagesMicro-Controller: Emergers Technologiesprajun_kumar3No ratings yet
- Memory Hierarchy: Capacity Access TimeDocument37 pagesMemory Hierarchy: Capacity Access Timemhd kdaimatiNo ratings yet
- SRAM Adi TemanDocument98 pagesSRAM Adi TemanAlice WilliamsNo ratings yet
- Lecture 8 SRAM 2021Document63 pagesLecture 8 SRAM 2021manishNo ratings yet
- Electrically Alterable ROM (EAROM)Document6 pagesElectrically Alterable ROM (EAROM)Zulhelmi NasirNo ratings yet
- EL203 Lec3Document11 pagesEL203 Lec3D StarNo ratings yet
- EE 319K Introduction To Microcontrollers: Lecture 1: Introduction, Embedded Sys, Product Life-Cycle, 9S12 ProgrammingDocument13 pagesEE 319K Introduction To Microcontrollers: Lecture 1: Introduction, Embedded Sys, Product Life-Cycle, 9S12 ProgrammingFreya OlamitNo ratings yet
- Embedded System: Shibu K VDocument24 pagesEmbedded System: Shibu K Vharish100% (1)
- ELEC3300 - 03-Embedded System StructureDocument27 pagesELEC3300 - 03-Embedded System StructureKwun Hok ChongNo ratings yet
- Finished DaDocument8 pagesFinished DaPenchal DoggalaNo ratings yet
- Microprocessor Based System: My Lord! Advance Me in Knowledge and True UnderstandingDocument15 pagesMicroprocessor Based System: My Lord! Advance Me in Knowledge and True UnderstandingAsma' ZubirNo ratings yet
- C29-FRAM-Factsheet-170802-0959 10pow13 NVMDocument4 pagesC29-FRAM-Factsheet-170802-0959 10pow13 NVMahmad assafeNo ratings yet
- Defination of ROMDocument4 pagesDefination of ROMshubham shakyaNo ratings yet
- Introduction to Embedded SystemsDocument5 pagesIntroduction to Embedded SystemssreedeepuNo ratings yet
- Introduction To Microprocessor: Advance TechnologyDocument13 pagesIntroduction To Microprocessor: Advance TechnologyPraveen SinghNo ratings yet
- Introduction to MicroprocessorsDocument24 pagesIntroduction to MicroprocessorsDeva RaguNo ratings yet
- Types of Storage Devices: RAM, ROM, EEPROM and Their FunctionsDocument35 pagesTypes of Storage Devices: RAM, ROM, EEPROM and Their FunctionsMaricris Galman SalamatNo ratings yet
- Chapter Two Contd CPU, Motherboard, Storage & I/ODocument10 pagesChapter Two Contd CPU, Motherboard, Storage & I/OChampionip4pNo ratings yet
- Unit - 3 Read Only Memory (ROM)Document14 pagesUnit - 3 Read Only Memory (ROM)Kuldeep SainiNo ratings yet
- Embedded Systems Introduction: 1.1 Microcontroller OrganizationDocument6 pagesEmbedded Systems Introduction: 1.1 Microcontroller OrganizationAyberk Furkan YağdıNo ratings yet
- Unit 1 EdDocument32 pagesUnit 1 Edsupraja tirumalasettiNo ratings yet
- Gradeup Computer Awareness Digest SummaryDocument18 pagesGradeup Computer Awareness Digest SummaryDilip ThummarNo ratings yet
- Microcontrollers: The Minimum Computational SystemDocument55 pagesMicrocontrollers: The Minimum Computational SystemSalva CervantesNo ratings yet
- Lec 6Document4 pagesLec 6jkmaroNo ratings yet
- Chapter 1 Intro To MicroproDocument22 pagesChapter 1 Intro To Microproellyshacb-wp21No ratings yet
- Computer Hardware 23Document4 pagesComputer Hardware 23Krishna SewaNo ratings yet
- Types of IcDocument2 pagesTypes of IcEdbert CatapangNo ratings yet
- Dgital Bab 5Document30 pagesDgital Bab 5Naseer AbdaljabarNo ratings yet
- DC Unit 5Document21 pagesDC Unit 5thiruct77No ratings yet
- Microprocessor (P) (Mpu) : Μ A Pisacpuonasinglechip. Components Of CpuDocument24 pagesMicroprocessor (P) (Mpu) : Μ A Pisacpuonasinglechip. Components Of CpuKashif HussainNo ratings yet
- Chapter 22Document23 pagesChapter 22Midhun LNo ratings yet
- Rom Memory DefinationDocument7 pagesRom Memory DefinationEgzon SalihuNo ratings yet
- Unit 4 - L Notes - Introduction To MicrocontrollerDocument53 pagesUnit 4 - L Notes - Introduction To MicrocontrollerAKSHANSH MATHUR100% (1)
- Chapter 4Document20 pagesChapter 4salitemhiretNo ratings yet
- Introduction To Microcontrollers: by Engr. Shehzad HaneefDocument5 pagesIntroduction To Microcontrollers: by Engr. Shehzad HaneefEngr.Shehzad HaneefNo ratings yet
- Chapter 5 Memory and Memory InterfaceDocument56 pagesChapter 5 Memory and Memory InterfacePetra KalasaNo ratings yet
- The Arduino Life: Workshop On Arduino Embedded Development BoardDocument41 pagesThe Arduino Life: Workshop On Arduino Embedded Development BoardharishNo ratings yet
- Lectures 1-4 Interface (Technology) NewDocument21 pagesLectures 1-4 Interface (Technology) Newaaaa100% (1)
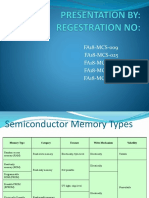
- Fa18-Mcs-009 Fa18-Mcs-025 Fa18-Mcs-029 Fa18-Mcs-036 Fa18-Mcs-040Document22 pagesFa18-Mcs-009 Fa18-Mcs-025 Fa18-Mcs-029 Fa18-Mcs-036 Fa18-Mcs-040Rai HessyNo ratings yet
- Computer Science (NEW) Code: 083 Ch1: Comp. System and OrganisationDocument37 pagesComputer Science (NEW) Code: 083 Ch1: Comp. System and OrganisationTeenu GamerzNo ratings yet
- Computer Awareness MaterialDocument20 pagesComputer Awareness MaterialNaga VamshiNo ratings yet
- Module 1 Its Lecture NotesDocument21 pagesModule 1 Its Lecture NotesraghavarthiniNo ratings yet
- UNIT I - Day-2Document13 pagesUNIT I - Day-2V VizNo ratings yet
- Embedded System IntroductionDocument42 pagesEmbedded System IntroductionHahahaNo ratings yet
- FCHN - Module 1 - Fundamentals of Computer SystemDocument14 pagesFCHN - Module 1 - Fundamentals of Computer Systemmirchigamers7No ratings yet
- Comparative Study of Technology in Semiconductor Memories-A ReviewDocument5 pagesComparative Study of Technology in Semiconductor Memories-A ReviewAlexis RodríguezNo ratings yet
- Advanced Test Methods for SRAMs: Effective Solutions for Dynamic Fault Detection in Nanoscaled TechnologiesFrom EverandAdvanced Test Methods for SRAMs: Effective Solutions for Dynamic Fault Detection in Nanoscaled TechnologiesNo ratings yet
- NPTEL CC Assignment6Document4 pagesNPTEL CC Assignment6Paul StarkNo ratings yet
- NPTEL CC Assignment11Document4 pagesNPTEL CC Assignment11Paul Stark0% (1)
- NPTEL CC Assignment9 PDFDocument4 pagesNPTEL CC Assignment9 PDFPaul Stark0% (1)
- NPTEL CC Assignment5Document4 pagesNPTEL CC Assignment5Paul StarkNo ratings yet
- IIT Kharagpur NPTEL Cloud Computing MCQ AssignmentDocument4 pagesIIT Kharagpur NPTEL Cloud Computing MCQ AssignmentPaul StarkNo ratings yet
- NPTEL CC Assignment10Document4 pagesNPTEL CC Assignment10Paul Stark0% (1)
- NPTEL Cloud Computing Week 7 MCQDocument5 pagesNPTEL Cloud Computing Week 7 MCQPaul StarkNo ratings yet
- Slide 7Document40 pagesSlide 7Paul StarkNo ratings yet
- Day4 FMEADocument55 pagesDay4 FMEAPaul StarkNo ratings yet
- Slide3 1Document90 pagesSlide3 1Paul StarkNo ratings yet
- Slide 2Document65 pagesSlide 2Paul StarkNo ratings yet
- Slide 1Document28 pagesSlide 1Paul StarkNo ratings yet
- Design for Quality and Reliability ToolsDocument57 pagesDesign for Quality and Reliability ToolsPaul StarkNo ratings yet
- Day3 Function FMEADocument56 pagesDay3 Function FMEAPaul StarkNo ratings yet
- Module 345Document54 pagesModule 345Paul StarkNo ratings yet
- QFD Construction: A Step-by-Step Guide to Quality Functional DeploymentDocument76 pagesQFD Construction: A Step-by-Step Guide to Quality Functional DeploymentPaul StarkNo ratings yet
- Day1 - Course IntroductionDocument12 pagesDay1 - Course IntroductionPaul StarkNo ratings yet
- UntitledDocument14 pagesUntitledapi-86544202No ratings yet
- Lab 4 Organizational Units, Groups, UsersDocument4 pagesLab 4 Organizational Units, Groups, UsersNagavelli Aravind reddyNo ratings yet
- IBM Websphere Application Server Types of ProfilesDocument15 pagesIBM Websphere Application Server Types of ProfilessrisylamNo ratings yet
- Solaris 10 Static IP Network Configuration GuideDocument40 pagesSolaris 10 Static IP Network Configuration GuideSouvik HalderNo ratings yet
- CM 11 BootDocument314 pagesCM 11 BootBNo ratings yet
- Parts Catalog: Hitachi Proprietary K6603315Document36 pagesParts Catalog: Hitachi Proprietary K6603315ulrik engellNo ratings yet
- 12 The EBIOSDocument4 pages12 The EBIOSxavi2975No ratings yet
- Ethernet Crossover CableDocument6 pagesEthernet Crossover CableDaveNo ratings yet
- Install Oracle Apex 4 on Oracle Database 11gDocument11 pagesInstall Oracle Apex 4 on Oracle Database 11gjweb911No ratings yet
- Network Function VirtualizationDocument8 pagesNetwork Function VirtualizationavaunpNo ratings yet
- Vmware Remote Console 120 VsphereDocument29 pagesVmware Remote Console 120 Vsphereadm cddsNo ratings yet
- Red Hat Enterprise Linux-8-Managing File systems-en-USDocument159 pagesRed Hat Enterprise Linux-8-Managing File systems-en-USsamNo ratings yet
- CMG 2015 Hardware and Operating System RecommendationsDocument8 pagesCMG 2015 Hardware and Operating System RecommendationsDian Handayani PratiwiNo ratings yet
- Introduction To Assembly Language (Chapter 1)Document27 pagesIntroduction To Assembly Language (Chapter 1)sara100% (2)
- Wmic Command ListDocument31 pagesWmic Command ListjoseanNo ratings yet
- Master Thesis Computer Science: Radboud UniversityDocument45 pagesMaster Thesis Computer Science: Radboud UniversityYves BlaNo ratings yet
- IP Addressing and Subnetting For New Users - Cisco SystemsDocument8 pagesIP Addressing and Subnetting For New Users - Cisco SystemsWewe SlmNo ratings yet
- VgcUtil Theme File Path Error LogsDocument1,736 pagesVgcUtil Theme File Path Error LogsJoanna Marie AngelesNo ratings yet
- Inno3D Geforce GTX 1050 Ti Compact: PN: N105T-1Sdv-M5CmDocument1 pageInno3D Geforce GTX 1050 Ti Compact: PN: N105T-1Sdv-M5CmAlexandru MihaiNo ratings yet
- 8086 InterruptsDocument22 pages8086 InterruptsTowsifNo ratings yet
- Opera Keyboard ShortcutsDocument6 pagesOpera Keyboard ShortcutsRandy SnowNo ratings yet
- Learn AMBA Bus Protocols with Free ARM Specs and WikipediaDocument5 pagesLearn AMBA Bus Protocols with Free ARM Specs and WikipediaAashishNo ratings yet
- SmartLogger2000 DatasheetDocument1 pageSmartLogger2000 DatasheetFrancisco José Fontelles ObelenisNo ratings yet
- CSO Gaddis Java Chapter01Document60 pagesCSO Gaddis Java Chapter01ẂalaMohammadNo ratings yet
- Serial communication lab reportDocument5 pagesSerial communication lab reporthamza shahbazNo ratings yet
- Pds Ic45 RedhatDocument128 pagesPds Ic45 RedhatSnopi87No ratings yet