You might also like
- Kalman CDocument7 pagesKalman CcartamenesNo ratings yet
- Advanced SAS Macro Language Techniques: Destiny Corporation, Wethersfield, CTDocument5 pagesAdvanced SAS Macro Language Techniques: Destiny Corporation, Wethersfield, CTNagesh KhandareNo ratings yet
- Met A Trader 5 SourceDocument7 pagesMet A Trader 5 Sourceanon_852985762100% (1)
- uvm_config_dbDocument10 pagesuvm_config_dbAFSAL ANo ratings yet
- Common Commands in ICC2 2 Place StageDocument5 pagesCommon Commands in ICC2 2 Place StageRAZNo ratings yet
- RNC CommandsDocument7 pagesRNC CommandsintorefNo ratings yet
- Operating Systems: Assignment 1: System Calls and SchedulingDocument6 pagesOperating Systems: Assignment 1: System Calls and SchedulingNatalie AhmadNo ratings yet
- Lob ExampleDocument4 pagesLob ExamplecangsterNo ratings yet
- Communication-Via-Udp?s - Tid Answers - rc2-2 - p5 - MLT: Sample Fumctions: Msfun - Realtime - Elapsed (Block)Document2 pagesCommunication-Via-Udp?s - Tid Answers - rc2-2 - p5 - MLT: Sample Fumctions: Msfun - Realtime - Elapsed (Block)Abeer Proj AZMNo ratings yet
- Java Code for Blood Pressure Risk Assessment ApplicationDocument25 pagesJava Code for Blood Pressure Risk Assessment ApplicationYurim HatamaiyaNo ratings yet
- Tutorial 4Document3 pagesTutorial 4TharmanSivaNo ratings yet
- D3.1 CompanionDocument41 pagesD3.1 CompaniongkoutNo ratings yet
- Normal Adder UVM Verification Full DocumentDocument14 pagesNormal Adder UVM Verification Full Documentanjimedidi2610100% (1)
- TechTip - Analyze Your Programs and Applications, Part II - System Administration - IT Infrastructure 3Document6 pagesTechTip - Analyze Your Programs and Applications, Part II - System Administration - IT Infrastructure 3Johnny SaysBlowmeNo ratings yet
- SDR Software Modifications (Ver 1 - 4)Document6 pagesSDR Software Modifications (Ver 1 - 4)Roxana Aldea-CiaciruNo ratings yet
- OVM Open Verification Methodology: Prepared By: Saurabh JainDocument42 pagesOVM Open Verification Methodology: Prepared By: Saurabh JainhemantsaxnaNo ratings yet
- MCMMDocument3 pagesMCMMSeshareddy KatamNo ratings yet
- Icc, star-RC and PT StepsDocument4 pagesIcc, star-RC and PT StepsSiva Sankar100% (2)
- LT Mahout ExercisesDocument4 pagesLT Mahout ExercisesMypostNo ratings yet
- Infecting Loadable Kernel Modules on Linux 2.6/3.0Document46 pagesInfecting Loadable Kernel Modules on Linux 2.6/3.0Rishab ChoubeyNo ratings yet
- READMEDocument6 pagesREADMESaurabh PednekarNo ratings yet
- Developer Tutorial Aqua-SimDocument11 pagesDeveloper Tutorial Aqua-SimSukhchain SinghNo ratings yet
- On movingBodyTopoFvMeshDocument12 pagesOn movingBodyTopoFvMeshSukhamMichaelNo ratings yet
- WWWHDocument4 pagesWWWHsamanthasmr305No ratings yet
- Q OvmDocument44 pagesQ OvmVivek100% (1)
- Dump Location: Import A Schema Into An Already Configured DatabaseDocument9 pagesDump Location: Import A Schema Into An Already Configured DatabasearunNo ratings yet
- Ettag 2Document4 pagesEttag 2samanthasmr305No ratings yet
- OVMDocument77 pagesOVMKartheek RajaNo ratings yet
- Commanded IDocument4 pagesCommanded ITank TopNo ratings yet
- 1 Java MethodsDocument9 pages1 Java MethodsIel KenzoNo ratings yet
- Compatibility Information Automation Platform: User Management (CDS-28943)Document3 pagesCompatibility Information Automation Platform: User Management (CDS-28943)IsraelNo ratings yet
- Systemverilog Interview QuestionsDocument31 pagesSystemverilog Interview QuestionsDivya Dm100% (1)
- Chemcad 5 Services To Visual Basic ApplicationsDocument41 pagesChemcad 5 Services To Visual Basic ApplicationsFrancoNo ratings yet
- ConfigDocument3 pagesConfigtaiiq zhouNo ratings yet
- Spring Bean Life Cycle MethodsDocument6 pagesSpring Bean Life Cycle Methodslosus007No ratings yet
- Piled by AsmanuhaDocument13 pagesPiled by AsmanuhaJuan Pablo Astudillo LeónNo ratings yet
- E 4Document4 pagesE 4samanthasmr305No ratings yet
- TSL Script For WinrunnerDocument5 pagesTSL Script For WinrunnerNani ReddyNo ratings yet
- Processes: &describe Process, Prcnam, - OptionsDocument2 pagesProcesses: &describe Process, Prcnam, - OptionsTran Van DaiNo ratings yet
- 3PAR Storage Multi-Path (Hyperactive) + RHEL7.2 + ORACLE 11G-RAC Environme NT Construction NotesDocument17 pages3PAR Storage Multi-Path (Hyperactive) + RHEL7.2 + ORACLE 11G-RAC Environme NT Construction NotesAmit KumarNo ratings yet
- BVNDocument3 pagesBVNsamanthasmr305No ratings yet
- mixmodForMatlabQuickStart 2-2 PDFDocument2 pagesmixmodForMatlabQuickStart 2-2 PDFToon ManNo ratings yet
- ATPG Flow OptimizationDocument7 pagesATPG Flow OptimizationVENKATRAMANNo ratings yet
- Moshell InstallDocument5 pagesMoshell InstallAzea ADANo ratings yet
- Untitled 5Document1 pageUntitled 5Jonathan Ricardo Robles ReyesNo ratings yet
- Chapter 12Document5 pagesChapter 12pankaj aggarwalNo ratings yet
- JHHHHDocument3 pagesJHHHHsamanthasmr305No ratings yet
- CNC GSK TurnDocument7 pagesCNC GSK TurnNapoleón Mamani MachacaNo ratings yet
- Projet SEDocument9 pagesProjet SEmaachoudouaa04No ratings yet
- 0.1 Guilherme Marthe - Boston House Pricing ChallengeDocument15 pages0.1 Guilherme Marthe - Boston House Pricing ChallengeGuilherme Marthe100% (1)
- System Verification Methodology Manual (VMM 1.2Document36 pagesSystem Verification Methodology Manual (VMM 1.2pearlkrishNo ratings yet
- AsasasaDocument33 pagesAsasasaKeyurNo ratings yet
- Mallopt Man InstructDocument6 pagesMallopt Man InstructBharanitharan SundaramNo ratings yet
- Using Macro and ODS To Overcome Limitations of SAS ProceduresDocument7 pagesUsing Macro and ODS To Overcome Limitations of SAS ProceduresrajsalgyanNo ratings yet
- GMLC QuickStart-1.3Document6 pagesGMLC QuickStart-1.3Umar MajeedNo ratings yet
- Mv1 CSJ ManualDocument7 pagesMv1 CSJ ManualHajnal128No ratings yet
- Udghosh Climbing Event BudgetDocument2 pagesUdghosh Climbing Event BudgetVyankatesh AshtekarNo ratings yet
- Correlation Coefficients Between VariablesDocument9 pagesCorrelation Coefficients Between VariablesVyankatesh AshtekarNo ratings yet
- CMake ListsDocument5 pagesCMake ListsVyankatesh AshtekarNo ratings yet
- What Is The Difference Between Fully Observable and Partially Observable Agents?Document2 pagesWhat Is The Difference Between Fully Observable and Partially Observable Agents?Vyankatesh AshtekarNo ratings yet
- GATE MathsDocument1 pageGATE MathsVyankatesh AshtekarNo ratings yet
- Both (A) and (B) ) Mimic The Human Intelligence in Non-Living Beings) All of The AboveDocument2 pagesBoth (A) and (B) ) Mimic The Human Intelligence in Non-Living Beings) All of The AboveVyankatesh AshtekarNo ratings yet
- EE698L: Artificial Intelligence, Machine Learning, Deep Learning, & Its Applications (2020-21 Sem II)Document2 pagesEE698L: Artificial Intelligence, Machine Learning, Deep Learning, & Its Applications (2020-21 Sem II)Vyankatesh AshtekarNo ratings yet
- Topics - PMRFDocument2 pagesTopics - PMRFVyankatesh AshtekarNo ratings yet
- This Is A Dynamic List. It Will Get Updated As and When Departments Propose Changes.)Document46 pagesThis Is A Dynamic List. It Will Get Updated As and When Departments Propose Changes.)Vyankatesh AshtekarNo ratings yet
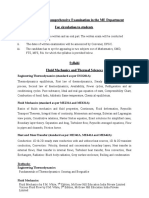
- Structure of The Comprehensive Examination in The ME Department For Circulation To StudentsDocument4 pagesStructure of The Comprehensive Examination in The ME Department For Circulation To StudentspraveenNo ratings yet
- Ulrich AestheticsDocument10 pagesUlrich AestheticsChetna Shetty DikkarNo ratings yet
- Comparison - Loader MechanismDocument6 pagesComparison - Loader MechanismVyankatesh AshtekarNo ratings yet
- Channel LCN GuideDocument11 pagesChannel LCN GuideLavanya PkNo ratings yet
- Define An Agent, An Ideal Agent, and An Agent Program?: Assignment 2 Objective QuestionsDocument2 pagesDefine An Agent, An Ideal Agent, and An Agent Program?: Assignment 2 Objective QuestionsVyankatesh AshtekarNo ratings yet
- Indian Institute of Technology Kanpur Academic Calendar For 2020 21 II SemesterDocument3 pagesIndian Institute of Technology Kanpur Academic Calendar For 2020 21 II SemesterHarshit TiwariNo ratings yet
- Education: Program Institution %/CGPA Year of CompletionDocument2 pagesEducation: Program Institution %/CGPA Year of CompletionVyankatesh AshtekarNo ratings yet
- PMRF My GuidelinesDocument1 pagePMRF My GuidelinesVyankatesh AshtekarNo ratings yet
- Optimized Parallel Lift With Starting Model As Existing LinkageDocument3 pagesOptimized Parallel Lift With Starting Model As Existing LinkageVyankatesh AshtekarNo ratings yet
- Syllabus For ToMDocument2 pagesSyllabus For ToMVyankatesh AshtekarNo ratings yet
- M Tech Brochure 201512 MarchDocument43 pagesM Tech Brochure 201512 MarchPawan Kumar PrajapatNo ratings yet
- My AgendaDocument1 pageMy AgendaVyankatesh AshtekarNo ratings yet
- Advanced Mechanics of SolidsDocument3 pagesAdvanced Mechanics of SolidsVyankatesh AshtekarNo ratings yet
- Import Gatt DeclarationDocument2 pagesImport Gatt DeclarationVyankatesh AshtekarNo ratings yet
- Parallel Lift CharacteristicsDocument13 pagesParallel Lift CharacteristicsVyankatesh AshtekarNo ratings yet
- Vibration Analysis, Control and Optimum Accelerometer Placement For Successful Vibrations TestsDocument44 pagesVibration Analysis, Control and Optimum Accelerometer Placement For Successful Vibrations TestsVyankatesh AshtekarNo ratings yet
- How To Make A Spud CannonDocument3 pagesHow To Make A Spud CannonVyankatesh AshtekarNo ratings yet
- 3 Annex B.1 Software OutputDocument42 pages3 Annex B.1 Software Outputhenjie mirasolNo ratings yet
- Process Synchronization Buffer Queue: Producer-Consumer ProblemDocument10 pagesProcess Synchronization Buffer Queue: Producer-Consumer Problemrokr58No ratings yet
- QuestionsDocument20 pagesQuestionsGamer ManNo ratings yet
- Java Fundamentals Lesson 2 ExercisesDocument2 pagesJava Fundamentals Lesson 2 ExercisesSteven BakerNo ratings yet
- How FIX32 Predefined Variables Map To iFIX Object PropertiesDocument3 pagesHow FIX32 Predefined Variables Map To iFIX Object PropertiesphuvtbuithuongNo ratings yet
- Unit 3Document15 pagesUnit 3Sumita Barun kumarNo ratings yet
- CSE202 Object Oriented Programing: Let's Explore and Move To "Better C"Document28 pagesCSE202 Object Oriented Programing: Let's Explore and Move To "Better C"mujtaba21No ratings yet
- MVC Project Assignment November 2014Document2 pagesMVC Project Assignment November 2014dobromirzlatkov0% (1)
- Huge List of Learn-To-code Programs From All Around The World by Charles Neill of Inventropy November 2013Document21 pagesHuge List of Learn-To-code Programs From All Around The World by Charles Neill of Inventropy November 2013johntripleNo ratings yet
- Footer Links SAP Replied EmailDocument3 pagesFooter Links SAP Replied Emailshaikfarooq9No ratings yet
- MICROSOFT WORD - Periodical ExamDocument1 pageMICROSOFT WORD - Periodical ExamROSERPHINE DERECHONo ratings yet
- Applet Life Cycle in JavaDocument6 pagesApplet Life Cycle in JavamsukumarbtechNo ratings yet
- COBOL V6.3 Whats NewDocument74 pagesCOBOL V6.3 Whats NewMUSICA MUSICA100% (1)
- Java - A Complete Practical Solu - Swati SaxenaDocument59 pagesJava - A Complete Practical Solu - Swati SaxenapradeepNo ratings yet
- FactoryTalk View Machine Edition - 8.20.00 (Released 3 - 2016)Document2 pagesFactoryTalk View Machine Edition - 8.20.00 (Released 3 - 2016)strato1977No ratings yet
- Configuring and Extending ApplicationsDocument236 pagesConfiguring and Extending ApplicationsMohammed Abdelfttah MustafaNo ratings yet
- AEM Agenda Day 2: Install Geometrixx Site, Configure Authoring Modes, Create Templates, Components and PagesDocument10 pagesAEM Agenda Day 2: Install Geometrixx Site, Configure Authoring Modes, Create Templates, Components and PagesSunil SaharanNo ratings yet
- Practical No. 03Document3 pagesPractical No. 03Diksha JadhavNo ratings yet
- C NotesDocument96 pagesC NotesSai Kumar MandapalleNo ratings yet
- Semaphore Simulation Simulation Using JAVADocument8 pagesSemaphore Simulation Simulation Using JAVAGaurav DeshmukhNo ratings yet
- UntitledDocument1,365 pagesUntitledFilip hraskoNo ratings yet
- LogDocument26 pagesLogHeni HaryantiNo ratings yet
- Container Engine - ITIDocument49 pagesContainer Engine - ITIGeorge HelmyNo ratings yet
- MongoDB CRUD OperationsDocument70 pagesMongoDB CRUD OperationsFlor GarciaNo ratings yet
- WDK Tutorial 42Document60 pagesWDK Tutorial 42alina_panaitNo ratings yet
- Algorithms 2Document49 pagesAlgorithms 2Romeo BalingaoNo ratings yet
- 10 MultitaskingDocument40 pages10 MultitaskingJagan RajendiranNo ratings yet
- Spting BootDocument54 pagesSpting Bootediga madhuNo ratings yet
- UNIT 4 - Linked List: 1. Which of The Following Is Not A Disadvantage To The Usage of Array?Document8 pagesUNIT 4 - Linked List: 1. Which of The Following Is Not A Disadvantage To The Usage of Array?Rehan PathanNo ratings yet
- MS Office ModuleDocument3 pagesMS Office ModulePete CatindigNo ratings yet