Professional Documents
Culture Documents
Structural Damage Identification From
Uploaded by
aleksCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Structural Damage Identification From
Uploaded by
aleksCopyright:
Available Formats
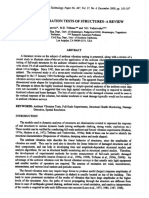
STRUCTURAL DAMAGE IDENTIFICATION FROM
DYNAMIC-TEST DATA
By Juan R. Casas I and Angel C. Aparicio 2
ABSTRACT: The paper deals with a methodology for the use of dynamic response
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
as an inspection and surveillance tool for concrete structures (mainly bridges). The
method is based upon a finite-element analysis for identification of stiffness char-
acteristics (related to cracking) starting from modal dynamic parameters (natural
frequencies and mode shapes) derived from dynamic tests. The use of dynamic
data is convenient because acceleration transducers can be easily mounted in the
structure instead of displacement transducers, mainly when the bridge to be tested
overpasses a river, high valley, or traffic road. Several damage-identification ex-
amples are performed with groups of reinforced concrete beams with different and
well-defined cracking patterns. Dynamic response is measured by acceleration
transducers. This experimental verification clearly shows the effectiveness of the
proposed method in the identification of location, extension, and amount of crack-
ing when some important requirements concerning the dynamic data recorded are
taken into account. In particular, more than the first natural frequency must be
evaluated.
INTRODUCTION
A number of experiments have d e m o n s t r a t e d the close relationship be-
tween variation of real bearing conditions (Douglas and R e i d 1982), torsion
(Buckland et al. 1979) or bending stiffness ( K a t o and Shimada 1986; Konig
and Giegerich 1989; A g a r d h 1991), and changes in the natural frequency
of a bridge. Also, in several international technical guidelines the mea-
surement of fundamental frequency is r e c o m m e n d e d in the long-term ob-
servation of structures (Javor 199l). H o w e v e r , these changes in stiffness or
bearings can be due to quite different causes. F o r instance, in the tests
performed by Konig and Giegerich the nearly equal increase of the six
natural frequencies corresponding to vertical deflections of the bridge in
measurements carried out at three, six, and 12 months after completion of
the site work, is clearly related to the uniform growth in the modulus of
elasticity (E) with time in the bridge because of concrete hardening.
On the other hand, in the tests described by A g a r d h (1991) and K a t o
and Shimada (1986) the variation in frequencies are u n d o u b t e d l y linked to
the change of m o m e n t of inertia of the cross section in bending due to
cracking. This is because the different m e a s u r e m e n t s are taken as m o r e
cracking is d e v e l o p e d due to increasing external loads up to failure. All
these studies raise the f u n d a m e n t a l question of how to relate a change in
frequency with a variation of the elasticity modulus (or any p a r a m e t e r af-
fecting the whole bridge) not deriving in a b a d structural performance, or,
on the other hand, must the change in frequency be assumed to be a con-
sequence of cracking in a particular zone of the bridge? In o t h e r words, is
1Assoc. Prof., Dept. of Civ. Engrg., Tech. Univ. of Catalunya, Gran Capitan s/n,
Modulo C1, 08034 Barcelona, Spain.
2Prof., Dept. of Civ. Engrg., Tech. Univ. of Catalunya, Gran Capitan s/n, Modulo
C1, 08034 Barcelona, Spain.
Note. Discussion open until January 1, 1995. To extend the dosing date one
month, a written request must be flied with the ASCE Manager of Journals. The
manuscript for this paper was submitted for review and possible publication on
February 11, 1992. This paper is part of the Journal of Structural Engineering, Vol.
120, No. 8, August, 1994. 9 ISSN 0733-9445/94/0008-2437/$2.00 + $.25 per
page. Paper No. 3439.
2437
J. Struct. Eng. 1994.120:2437-2450.
it possible to assess the structural performance of a bridge by means of the
analysis of the dynamic behavior (i.e., using vibration as an inspection and
surveillance tool)?
In this paper the answers to these questions are discussed, showing the
possibility of quantifying the relation of dynamic response with damage.
Also presented in the paper are the requirements in the evaluation of dy-
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
namic parameters and the methodology to be used to make this quantifi-
cation possible.
THEORETICAL BACKGROUND
The amount of cracking (damage) in a cross section can be evaluated by
means of the equivalent moment of inertia concept. This is the cross-sec-
tional inertia that causes identical deformation in the same element without
cracking for a determinate load level as in the cracked structure. This def-
inition opens the possibility of obtaining an equivalent inertia in a zone of
the structure (equivalent to some degree of cracking or damage) starting
from the modal dynamic parameters (frequencies, damping and mode shapes)
evaluated in dynamic tests. To this end the relation to be used is
det[K- co2M[ = 0
[K - o~2M][6] = 0 (1)
where ~o, ~b = natural frequencies and vibration mode shapes of the struc-
ture; and K, M = global stiffness and mass matrices. The relation (1) is
formulated through a finite-element discretization of the structure and gov-
erns the undamped free vibration of the structure. The use of (1) to relate
the mass and stiffness characteristics (and by extension the existence of
damage due to cracks in a bridge) with the modal dynamic parameters is
justified by the little amount of damping in bridges and the small influence
in the experimentally measured frequency and vibration mode shape. Thus,
the adopting of more complicated models of damping will derive in more
sophisticated mathematical requirements not justified in terms of precision
achieved. Eq. (1) implicitly shows how a change in stiffness of an element
causes changes in frequencies and mode shapes.
At this point several questions are still unanswered
9 How to know that the change in frequency or mode shape amplitude
is due to change in stiffness and not in mass or bearing conditions
9 How to locate the cracking (which elements of a total finite-element
mesh have changes in the moment of inertia)
9 How to know the length of the cracked zone
9 How to differentiate a change in E or I when a change in bending
stiffness is detected
9 How to quantify the damage in the cracked zone in terms of equiv-
alent moment of inertia (lee)
These questions can be solved using a dynamic parameter identification
technique, i.e., obtaining the inertia modulus of q elements in the finite-
element mesh (Ieqj, j = 1 . . . . . q) in order to minimize the scalar per-
formance error
J = E [,,,,E - + [,,E(t) - r l)]2 (2)
i=I l=I i=1
2438
J. Struct. Eng. 1994.120:2437-2450.
where p = (/eql, /eq2 ..... leqq) , tOW -~ ith experimental frequency; qbie(l)
= experimental amplitude of ith vibration mode at point l; M = number
of points where modal amplitudes have been measured; and m, s = re-
spectively, number of frequencies and vibration modes experimentally mea-
sured.
This minimization leads to a nonlinear least-squares problem with the
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
solution
OpOJpo-- 0 (3)
Because of the implicit form of (1) the methodology based on the defi-
nition of an "approximate" model equivalent to the exact model in the
solution point is used (Casas 1989).
EXPERIMENTAL VERIFICATION
To check the feasibility of using the dynamic response of the bridge to
assess the structural performance (changes in cracking or bearing conditions)
a group of laboratory tests were performed. The experimental work is fully
described in (Casas 1989) and the main items are presented here.
DESCRIPTION OF TESTS
Methodology
To check the feasibility of dynamic response analysis in the identification
of cracking, particularly location, extension and amount, the following steps
were suggested.
1. Concreting of four pairs of beams (A1, A2, B1, B2, C1, C2, D1, and
D2). Number 1 indicates the reference (uncracked) beam and beams with
number 2 had a region with different cracking characteristics as shown in
Fig. 1.
2. Definition of dynamic deformation modulus of concrete and real bear-
ing conditions in uncracked beams starting from dynamic response caused
by impact force.
3. Using the parameters evaluated earlier and the dynamic response of
cracked beams, determination of the following variables for each beam:
cracking location, extension, spacing, and equivalent moment of inertia
(related with crack thickness and depth) in the cracked region.
4. Verification of parameters evaluated in point 3 by means of static test
a. Obtainment of experimental static deflection (we) at midspan of
beams under a known load.
b. Obtainment of theoretical static deflection (w,) via theoretical model
in uncracked beams.
c. Evaluation of static deformation modulus of concrete comparing
(w,) and (we) for uncracked beams.
d. Obtainment of theoretical static deflection (w,) in the cracked beams
via theoretical model with static deformation modulus evaluated in
item c. and parameters obtained in item 3. The relative error e =
( w t - w e ) / w ~ for cracked beams is directly related to the effective-
ness of the proposed method for the evaluation of structural dam-
age.
2439
J. Struct. Eng. 1994.120:2437-2450.
Ir: t80
tc : 150
t
"
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
5 ~ 75
mlullJ-~] I
Lt[LLtLLL '
111111111
mIHt ---@3
ILL[LLL
"1"111~11
"~
3 ,], 75
FAI I IItl Itlt Itl [---~-] J
tttltttttttt ~,
1113333111111S
1 75 l
Oimensians in cm
FIG. 1, Definition of Simulated Cracking in Beams
Definition of Specimen
The tests were performed on reinforced concrete beams. These beams
had a total length of 1.8 m and a span length (distance between supports)
of 1.5 m, rectangular cross-section with constant depth of 0.07 m and width
of 0.1 m (see Fig. 1). Cracking is simulated by means of formwork dispo-
sitions during concrete pouring. The main characteristics are (see Fig. 1)
Beam A2: Cracked length, 45 cm (in midspan); crack spacing: 5 cm
Beam B2: Cracked length, 27 cm (in quarter span); crack spacing: 5
cm
Beam C2: Cracked length, 21 cm (in midspan); crack spacing: 3 cm
Beam D2: Cracked length, 65 cm (in midspan); crack spacing: 5 cm
Data Acquisition and Recording
The experimental setup is presented in Fig. 2. Vibration is measured
using accelerometers. The acceleration transducers are located in midspan
and quarter-span. Two dynamic channels can be simultaneously recorded
so the vibration test is performed alternatively in uncracked (records 1 and
2) and cracked beams (records 3 and 4).
2440
J. Struct. Eng. 1994.120:2437-2450.
150 cm
~, F ( IMPACT HAMMER ]
I
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
4--- 37.5 "P 37.5 cm
\ 7
1 - Acceleration transducers 4 - Microcomputer
( Data recording )
2 - Signal conditioning 5 - Printer
3 - Digital oscilloscope 6 - Plotter
IEXPERIMENTASET-UP]
L
I ! ~176
A_ A
.<~ n|
J )~
1 11111
I ~ J CB
RE
AA
CM
KED
37.5 cm ~ 37.5 cm ~
0 CHANNEL IDENTIFICATION
FIG. 2. Experimental Arrangement and Definition of Records
Excitation
The dynamic vibration is achieved by means of an impact hammer at the
quarter-point of the beam, where no accelerometer is located. In this way
several modes are excited and after the transient response, the damped free
vibrations of the beam can be recorded,
RESULTS
In Table 1 the results concerning modal parameters (frequency, damping,
and modal amplitudes) for the two lowest vibration modes are presented.
In Table 2 the variation in frequency between cracked and uncracked
beams is evaluated for each group of beams. Two comments are of interest
2441
J. Struct. Eng. 1994.120:2437-2450.
TABLE 1. Dynamic Parameters of Modes 1 and 2
Phase (rad)
Modal Amplitude Frequency Damping
L
Beam 1/2 span 1/4 span 1/2 span I 1/4 span (Hz)
(1) (2) (3) (4) 1 (5) (6) (7)
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
(a) 4,,
A1 13.8 10.2 1.3 1.3 54.8 0.0141
A2 9.5 6.6 1.7 1.9 45.0 0.0138
B1 14.6 10.7 0.5 0,4 47.7 0.0129
B2 12.3 10.2 0.2 0,3 39.9 0.0080
C1 26.0 19.0 0.7 0,6 50.7 0.0130
C2 21.4 14.0 1.4 1.3 43.3 0.0102
D1 15.8 11.2 2.8 2.8 50.7 0.0143
D2 16.0 11.3 2.9 3.0 40.2 0.0078
(b) 2
__g 2.4 202,1 0.0174
A1 2,8 a
a
A2 3.1 --~ 0.9 196,3 0.0098
__a 1.9 a
BI 0.6 181.9 0.0228
__a 3.8 --" 2.8 152,0 0.0270
B2
a
C1 6.4 --~ 1.0 191.1 0.0150
a
C2 4.4 --~ 0.4 187.9 0.0170
__a 3.0 --" 2.8 192.9 0.0226
D1
a
D2 5.6 a 2.7 165,3 0.0370
"Vibration mode number 2 has a node at this point.
TABLE 2. Variation of Frequencies in Cracked and Uncracked Beams
Af, Af2
Beam (%) (%)
(1) (2) (3)
A 17.9 2.9
B 16.3 16.4
C 14.6 1.7
D 20.9 14.3
1. In groups A, C, and D (cracking at midspan) the greater the length
of cracked zone and the smaller the distance between cracks are, the greater
is the increase in the first natural frequency fl (vibration mode 1 has max-
imum amplitude at midspan). Beam B has a greater modification in the
second frequency f2 because of the greater cracked zone at quarter-span,
where amplitudes of vibration mode 2 are maximum.
2. Similar changes in fl are caused by very different structural damages
(different cracking patterns), whereas similar structural damages lead to
different changes in f2.
Results of Study
T o obtain the cracked z o n e and the Ieq value starting from the m o d a l
parameters the next steps are evaluated
2442
J. Struct. Eng. 1994.120:2437-2450.
l. Definition of model variables, i.e., observation vector (frequencies
and mode shapes) to be shifted
2. Definition of a feasible cracked region in the beam
3. Obtainment of the "approximate" model based on point 2
4. Process of minimization of J (mean quadratic error) using the "ap-
proximate model" in order to obtain the value of Ieq in the cracked region;
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
obtainment of (Jrain)i.
5. Repetition of steps 1 to 4 with different length and location of cracked
regions; the value of Ieq solution corresponds to a minimum value of (Jmi,);.
6. Verification of leq in the "exact" model
Identification of Real Bearing Conditions and Dynamic Deformation
Modulus (Reference State)
As presented in Table 3, the relation between the two lowest frequencies
depends on real bearing conditions at the ends of the beam and are inde-
pendent from beam stiffness assuming a perfect hinge or a perfect clamping
(see Fig. 3). In the cases with a superscript "a," there does not exist an
analytical solution, 1301 and co2 being evaluated with numerical methods using
reliable parameters for the finite-element model. As can be derived from
Table 1, there is no case in which the uncracked beams accomplish the
relation. This is an indication that the real bearing condition is an elastic
hinge. Therefore the dynamic response in the uncracked beams of each
TABLE 3. Values of ~2/~1 Assuming Different Theoretical Models and Bearing
Conditions
Bearing ~2
condition (rad/s) (rad/s)
(1) (2) (3) (4)
SS HzV~pA/4 4II2k/E~pA14 4
(independent from E)
CC 23.37X/-~pA 14 61.67~E[/pAl 4 2.75
(independent from E)
a
CSS 3.92
(independent from E)
EH Variable
(depending on El, K,)
aAnalytical solution not available.
p,A,E,[ p,A,E,[
SS C S S ',, ,-,'
I-
-f -4 I- ,=1 o .!
15 15
p,A,E,[ p,A,E,I
cc l EH f t_
A-,
!~ 1=150 J
15 15
FIG. 3. Definition of Bearing Conditions in Table 3
2443
J. Struct. Eng. 1994.120:2437-2450.
TABLE 4. Values of/<7, and E. Derived from Parameter Identification in Uncracked
Beams
Beam K. (N • m/rad) E. (GPa)
(1) (2) (3)
A1 7,353 33.62
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
B1 2,279 27.15
C1 3,713 29.63
D1 3,107 30.19
T A B L E 5. Results of Damage Identification in Beam A2
Hypothesis of Damage Parameters
' I'
cracking z leq
Case Variables location (cm) (cm 4) J (%)
(1) (2) (3) (4) (5) (6) (7)
1-A (01 I Indeterminate Not definite Not definite 0
2-A (o1~ I~) 1 MS 110 177 0 10.0
3-A (1)1, CO2 MS 30 118 9.7 • 10 -6" 13.0
0.6
4-A (017 (1)27 ~)1 MS 45 154 0.45 4.7
5-A ~Ol, o~z, ~bl, ~b~ MS 55 167 5.5 x 10 3 2.5
aValue of J neglecting vibration mode.
Note: See Fig. 5 for hypothesis of cracking location.
0.'/5 - 0.~,8
0.70 -< 0.4.0
0.65 i ,~ 0.32
o
0.60 ' x 0.2~,
055 ' 0.16
0.50' 0.08
0.~,5 0.00
30 so 6o 30 ~0 50 60
Cracked length I cm } Cracked length ( cm )
80
120 ,,
- - 100
128 1
i 120
136
= 1~,0
-- 1 ~
160
-- 152
180
160
168
la) (bl
FIG. 4. B E A M A 2 - - E v o l u t i o n of leq and J with Cracked Length: (a) Variables: Two
Frequencies; (b) Variables: Two Frequencies and First Mode
2444
J. Struct. Eng. 1994.120:2437-2450.
[~ I ,,.m I
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
I 'l..'. mim I
FIG. 5. Definition of Hypothesis of Cracking Location
TABLE 6. Results of Damage Identification in Beam 82
Hypothesis of Damage Parameters
cracking 1 1.q E
Case Variables location (cm) (cm") J (%)
(1) (2) (3) (4) (5) (6) (7)
1-B ~01~ (02 MS 117 193 1.24 x 10-3" 21
0.183
2-B ~1~ ~2 QS1 57 127 2.3 • 10-3a 7
0.011
3-B MS 150 196 0.031 10
4-B (017 (1)2~ ~b1 QS1 51 121 0.009 4.5
5-B t01~ 002~ ~1 QS2 6 + 6 56 0.182 14
"Value of J neglecting vibration mode.
Note: See Fig. 5 for hypothesis of cracking location.
group is used to define the reference state. Using the two frequencies and
the first mode shape, the values of K, (rotation stiffness) and Ea (dynamic
modulus of deformation) in Table 4 were obtained. These values have been
used in the identification process of cracked beams.
Identification of Damage
The process of identifying possible disorders (cracking) has been per-
formed in function of information available from dynamic testing. For in-
stance in Table 5, corresponding to beam A2, when only the first natural
frequency is considered as a variable to approximate in the least-square
minimization (case l-A), whichever was the cracked length and location it
was always possible to find a value of leq in the way that J = 0. The problem
is clearly indeterminate. Therefore the variation in the first natural fre-
quency can be associated either to a cracking in the beam or to a change
in the deformation modulus (of the whole beam) or in bearing conditions.
The conclusion is that the measurement of only one frequency is not enough
for the damage identification technique. Even when the modification in
frequency is related to cracking, trying to identify this pathology or defect
2445
J. Struct. Eng. 1994.120:2437-2450.
using only one frequency can lead to erroneous results. For instance, in this
case assuming a cracking on the whole beam we obtain/~q = 178 cm 4 and
= 4%, whereas for l = 45 cm (the real cracked zone) the results are Ieq
= 143 cm 4 with 8 = 10%. Based on this result the conclusion would be to
assume a cracking in the whole beam, which is far from reality.
Even when more information is available from dynamic tests, i.e., first
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
natural frequency and amplitude of vibration mode in two points (2-A), the
problem is not well conditioned, because the mode shape can be exactly
shifted varying the cracked length while the same happens with frequency
and the value of I~q. This derives in a value of J = 0. This could indicate
that cracking length and intensity were perfectly identified. However in the
static verification an error of 8 = 10% between theoretical and measured
deflections would be detected, this being a warning about the reliability of
the results. In Fig. 4 the evolution of Ieq and J (interpolation error) is
displayed as a function of cracked length in the identification algorithm for
beam A2. In Fig. 4(a) just the two frequencies are used as variables to be
shifted, while the first mode shape is added in Fig. 4(b). The minimum
value in J indicates the length of cracked zone and the value of lea a t this
zone.
As shown in Table 5, which presents the damage identification as a func-
tion of available information from dynamic tests, the worst information
concerning length of cracked zone and the minimum correlation between
measured and calculated deflections are achieved when minimum infor-
mation (one frequency) is translated into the identification process. The
correlation increases with available information, reaching a maximum for
case 5-A (two frequencies and two mode shapes). In this case the cracking
zone is expected to be at the midspan (see Fig. 5).
The same conclusion concerning the location of cracks in the structure
can be derived looking at Table 6, where the results of damage identification
in beam B2 as a function of available information from dynamic tests and
hypothesis of location of cracked zone as shown in Fig. 5. If only two
frequencies are measured and used in the process the minimum value of J
corresponds to case i-B, resulting in a cracking location at midspan. This
does not match real cracking in the prototype. Therefore the identification
process fails. Also in Table 6, the results concerning interpolation of two
frequencies and one mode are shown with different possible crack locations
in the beam (3-B, 4-B, 5-B). The identification process results in a minimum
value of J corresponding to case 4-B, which is the most real as confirmed
by the error (8) in the evaluation of static deflection. This result clearly
shows the effectiveness of the proposed method of damage identification
using analysis of dynamic response. In Fig. 6 the evolution of I~q and J is
presented as a function of cracked length for different hypotheses of crack
location at midspan or quarter span. Two frequencies and one mode shape
are used as variables.
In Table 7, corresponding to beams C2 and D2, the best results in static
deflection (percentage of error) are obtained for minimum J values when
mode shape is used in the identification. This clearly shows the effectiveness
of proposed damage identification even in extension and amount of cracking.
In fact, the amount of cracking in beam D2 is similar to A2, but extends
to a greater area. Thus the value of Ieq in beam D2 (161 cm 4) is similar to
beam A2 (167 cm0 and the value of I is greater. On the other hand in the
beam C2 the simulated damage is greater than in beam A2 and similar to
beam B2 (the space between cracks is 3 cm instead of 5 cm). The conse-
2446
J. Struct. Eng. 1994.120:2437-2450.
0.38 -] 0.16 0.2/,-
0.32 4
_
0.12
0.08
~ o.o~
~ 0.20,
o 0.16
"~ 0.12
J
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
0.30 i i i i 0,00 0.00 i I , I
90 120 150 36 /,8 50 0 2t, #8
Cracked length Cracked length Cracked length
(cm) '112 k ( cmI 40 (cm)
-- 184
~' 108 1161I \ \ 0o
120
192 r
_ 160
196
200
(al (b) (c)
FIG. 6. BEAM B2--Evolution of/~q and J with Cracked Length: (a) Location of
Cracking at Midspan; (b) Quarter-Span (One Zone); (c) Quarter-Span (Two Zones)
TABLE 7. Results of Damage Identification in Beams C2 and D2
Hypothesis of Damage Parameters
cracking 1 Lq
Case Variables location (cm) (cm4) ] (%)
(1) (2) (3) (4) (5) (6) (7)
1-C ol, (02 MS 24 126 0.0066 2.5
2-C (1)1, (02, +1 MS 24 126 0.0066 2.5
1-D (~ (0z MS 70 155 0.039 6.7
2-D (01, (02, +l MS 75 161 0.037 4.5
Note: See Fig. 5 for hypothesis of cracking location.
I PROTOTYPE ] I ,,,,,,,
s~
~-MODEL
llllt .,-
STATIC TEST] I ~ "1~ / I
We
FIG. 7. Definition of Symbols in Table 8
2447
J. Struct. Eng. 1994.120:2437-2450.
quence is a value of I e q in the cracked zone (24 cm; 126 cm 4) far e n o u g h
from b e a m s A 2 or D 2 (161 cm 4) a n d really close to b e a m B2 (121 cm4).
CONCLUSIONS
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
A m e t h o d o l o g y was devised for the identification of cracking a n d real
bearing conditions in concrete e l e m e n t s using analysis of d y n a m i c response.
T h r o u g h the research several conclusions were reached.
D a m a g e conditions in a structure due to cracking (width, d e p t h , a n d
distance b e t w e e n cracks) a n d actual b e a r i n g c o n d i t i o n s are successfully iden-
tified from analysis of the d y n a m i c r e s p o n s e of the structure.
W h e n cracks are p r e s e n t , the analysis allows n o t only a w a r n i n g a b o u t
existence of cracks, b u t also, a n d m o r e i m p o r t a n t , the q u a n t i f i c a t i o n in
terms of location ( T a b l e 6 a n d Fig. 5), e x t e n s i o n a n d a m o u n t of cracking
(see values of I a n d Ieq in T a b l e 8).
T o this p u r p o s e in the analysis the m o d e - s h a p e a m p l i t u d e s in s o m e points
besides the frequencies m u s t be used a n d t h e r e f o r e m u s t be accurately
m e a s u r e d and e v a l u a t e d in the d y n a m i c test. It was d e m o n s t r a t e d that using
only the f u n d a m e n t a l f r e q u e n c y can lead to e r r o n e o u s conclusions with
respect to location, e x t e n s i o n , a n d a m o u n t of cracking.
The m e a s u r e m e n t of o n l y o n e f r e q u e n c y is n o t e n o u g h to distinguish the
causes of modification in its original v a l u e ( b e a r i n g c o n d i t i o n s , d e f o r m a t i o n
modulus, cracking, etc.).
E v e n w h e n the change in f r e q u e n c y is a s s u m e d to be caused b y cracking
the identification p r o c e d u r e can lead to results c o n c e r n i n g e x t e n s i o n , lo-
cation, and a m o u n t quite far from reality.
It is necessary to m e a s u r e at least two f r e q u e n c i e s in o r d e r to o b t a i n n o t
only the cracked zone a n d e q u i v a l e n t i n e r t i a m o d u l u s , b u t also the real
bearing conditions.
TABLE 8. Summary of Experimental Results
E = ( W e -- W t ) / W e
Beams Prototype Model Static test (%)
(1) (2) (3) (4) (5)
A1, A2 s=5cm le = 2.5 cm P = 245 N 2.5
l = 45 cm l = 55 cm w, = 0.275 mm
(midspan) leq = 167 cm4
h = 3cm w, = 0.282 mm
B1, B2 s=3cm l~ = 1.5cm P = 275 N 4.5
l = 27 cm 1 = 51cm we = 0.357 mm
(quarter-span) leq = 121 cm4
h = 3cm wt = 0.341 mm
C1, C2 s=3cm l~ = 1.5cm P = 275 N 2.5
I = 21 cm 1 = 24 cm w e ~- 0.315 mm
(midspan) Ieq = 126 CII1a
h = 3cm w, = 0.307 mm
D1, D2 s = 5 c m l, = 2.5 cm P = 245 N 4.5
l = 65 cm / = 75cm we = 0.313 mm
(midspan) leq = 161 cm4
h = 3cm w, = 0.327 mm
Note: See Fig. 7 for definition of symbols.
2448
J. Struct. Eng. 1994.120:2437-2450.
In spite of different concrete quality used in each group of beams, damping
of the first vibration mode is similar in the uncracked beams. This seems
to confirm the results (Bachmann and Dieterle 1977) in the sense that the
modification of bending stiffness ( E l ) in magnitude does not affect the total
damping if the distribution of E1 along the structure remains constant.
There is not a clear direct relation between crack growthing and increase
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
in damping. In the tests performed, the cracked beams show values of
damping slightly lower than the uncracked beams. This conclusion is of
great interest in order not to include the damping as a modal parameter in
the parameter identification technique, and validates the adoption of model
of (1) in the process.
APPENDIX I. REFERENCES
Agardh, L. (1991). "Modal analyses of two concrete bridges in Sweden." Struct.
Engrg. Int., Vol. 4, 35-39.
Bachmann, H., and Dieterle, R. (1977). "Comportement dynamique d' un pont en
b6ton 16ger a Schaffhouse: Essais et Calculs." Annales de l' L T.B.T.P., (352),
110-119 (in French).
Buckland, P. G., Hooley, R., Morgenstern, B. D., and Rainer, J. H. (1979). "Sus-
pension bridge vibrations: computed and measured." J. Struct. Div., ASCE, Vol.
105, 859-874.
Casas, J. R. (1989). "Study of dynamic response as a method of control and sur-
veillance of bridges," PhD thesis, Technical University of Barcelona, Spain.
Douglas, B. M., and Reid, W. H, (1982). "Dynamic tests and system identification
of bridges." J. Struct. Div., ASCE, Vol. 108, 2295-2312.
Javor, T. (1991). "Damage classification of concrete structures; the state of the art
report of RILEM Technical Committee 104-DCC activity." Mat. and Struct., (142),
253-259.
Kato, M., and Shimada, S. (1986). "Vibration of PC bridge during failure process."
J. Struct. Engrg., ASCE, 112(7), 1692-1703.
Konig, G., and Giegerich, G. (1989). "Identification of structural properties using
dynamic tests." Proc., IABSE Symp. on Durability of Struct., IABSE, Lisbon,
Portugal, 835-840.
APPENDIX II. NOTATION
The following symbols are used in this paper:
A cross-sectional area;
E= modulus of elasticity of concrete;
E~= dynamic modulus of elasticity of concrete;
f= natural frequency of vibration;
I= moment of inertia of uncracked section;
~= equivalent moment of inertia (cracked section);
J= scalar performance error;
K = global stiffness matrix;
g~= rotation stiffness at supports;
l= length of cracked zone;
M = global mass matrix;
p = vector of unknown parameters;
2449
J. Struct. Eng. 1994.120:2437-2450.
W e = e x p e r i m e n t a l m e a s u r e d deflection;
w, = theoretical deflection;
e = relative error;
~b = vibration m o d e s h a p e ; a n d
to = angular frequency.
Downloaded from ascelibrary.org by HAWAII,UNIVERSITY OF on 09/16/13. Copyright ASCE. For personal use only; all rights reserved.
2450
J. Struct. Eng. 1994.120:2437-2450.
You might also like
- Composites Evaluation: Proceedings of the Second International Conference on Testing, Evaluation and Quality Control of Composites-TEQC 87From EverandComposites Evaluation: Proceedings of the Second International Conference on Testing, Evaluation and Quality Control of Composites-TEQC 87J. HerriotNo ratings yet
- Mechanics Today: Pergamon Mechanics Today Series, Volume 1From EverandMechanics Today: Pergamon Mechanics Today Series, Volume 1Rating: 3 out of 5 stars3/5 (5)
- Performance-Based Assessment Methodology For Retrofit of BuildingsDocument15 pagesPerformance-Based Assessment Methodology For Retrofit of BuildingsfaisaladeNo ratings yet
- Cable VibrationDocument15 pagesCable VibrationStructureClassNo ratings yet
- 1994 - Saiidi1994Document9 pages1994 - Saiidi1994Paul KohanNo ratings yet
- Prestress Force Effect On Vibration Frequency of Concrete BridgesDocument9 pagesPrestress Force Effect On Vibration Frequency of Concrete BridgesKing ColorNo ratings yet
- (Building Code 1983), For Instance, Which Treats The Problem of ComputationDocument11 pages(Building Code 1983), For Instance, Which Treats The Problem of ComputationabadittadesseNo ratings yet
- Bending Stiffness Identification of Simply Supported Girders Using An Instrumented Vehicle: Full Scale Tests, Sensitivity Analysis, and DiscussionDocument9 pagesBending Stiffness Identification of Simply Supported Girders Using An Instrumented Vehicle: Full Scale Tests, Sensitivity Analysis, and Discussionahmed amineNo ratings yet
- Kitipomchai 1984Document13 pagesKitipomchai 1984Doan Nguyen VanNo ratings yet
- Model Solutions For Performance-Based Seismic Analysis of An Anchored Sheet Pile Quay WallDocument13 pagesModel Solutions For Performance-Based Seismic Analysis of An Anchored Sheet Pile Quay WallJustin CorbettNo ratings yet
- Real-Time Dynamic Substructuring Testing of A Bridge Equipped With Friction-Based Seismic IsolatorsDocument11 pagesReal-Time Dynamic Substructuring Testing of A Bridge Equipped With Friction-Based Seismic IsolatorsshivamomshantiNo ratings yet
- ShinozukaDocument9 pagesShinozukaIon SococolNo ratings yet
- Roueche Et Al 2024 Performance of Hurricane Resistant Housing During The 2022 Arabi Louisiana TornadoDocument18 pagesRoueche Et Al 2024 Performance of Hurricane Resistant Housing During The 2022 Arabi Louisiana TornadoGUSTAVO ANDRÉS NIÑO BAUTISTANo ratings yet
- Tensile Tests and Failure Analysis of Concrete: J. Struct. Eng., 1986, 112 (11) : 2462-2477Document16 pagesTensile Tests and Failure Analysis of Concrete: J. Struct. Eng., 1986, 112 (11) : 2462-2477angelNo ratings yet
- 2.18-Displacement Estimates For Performance-Based Seismic DesignDocument8 pages2.18-Displacement Estimates For Performance-Based Seismic DesignWangyhNo ratings yet
- Model Solutions For Performance Based Seismic Analysis of An Anchored Sheet Pile Quay Wall PDFDocument14 pagesModel Solutions For Performance Based Seismic Analysis of An Anchored Sheet Pile Quay Wall PDFdandy imam fauziNo ratings yet
- Earthquake Duration Effect On Structural ReliabilityDocument6 pagesEarthquake Duration Effect On Structural ReliabilitymaNo ratings yet
- Neural Network For Stability AnalysisDocument6 pagesNeural Network For Stability AnalysisnaseebNo ratings yet
- Special Section: Balancing, Restoration, and Palinspastic ReconstructionDocument28 pagesSpecial Section: Balancing, Restoration, and Palinspastic ReconstructionБогдан ПлотниковNo ratings yet
- 1988 Wilcox PDFDocument12 pages1988 Wilcox PDFcjunior_132No ratings yet
- Bayesian ModalDocument18 pagesBayesian ModalLogan PatrickNo ratings yet
- R C Factors Confined Masonry BuildingsDocument8 pagesR C Factors Confined Masonry BuildingsMaria AngelNo ratings yet
- (Asce) Be 1943-5592 0001298Document19 pages(Asce) Be 1943-5592 0001298David MirelesNo ratings yet
- Uang 1991 ESTABLISHING R (OR RW) AND CD FACTORS FOR BUILDING SEISMIC PROVISIONSDocument10 pagesUang 1991 ESTABLISHING R (OR RW) AND CD FACTORS FOR BUILDING SEISMIC PROVISIONSMaria AngelNo ratings yet
- Seismic Retrofit of Low-Rise Reinforced-Concrete Buildings - A Modified Displacement-Based Design Procedure - 2020Document10 pagesSeismic Retrofit of Low-Rise Reinforced-Concrete Buildings - A Modified Displacement-Based Design Procedure - 2020jcarlosgomez546No ratings yet
- 8Document8 pages8R T.INo ratings yet
- Fatigue Analysis of Spread Mooring Line: Chanhoe Kang, Changhyun Lee, Seock-Hee Jun, Yeong-Tae OhDocument7 pagesFatigue Analysis of Spread Mooring Line: Chanhoe Kang, Changhyun Lee, Seock-Hee Jun, Yeong-Tae OhMuhammad Rafiq RavinNo ratings yet
- Chapter One Hundred Seventy Nine: T. Atsoctatfmember, Asce, Tongass Engineersttnc, "Juneau, Alaska7Document17 pagesChapter One Hundred Seventy Nine: T. Atsoctatfmember, Asce, Tongass Engineersttnc, "Juneau, Alaska7Shyam TPNo ratings yet
- System Identification of Bridges With Nonlinear Foundations: Journal of The Chinese Institute of EngineersDocument11 pagesSystem Identification of Bridges With Nonlinear Foundations: Journal of The Chinese Institute of EngineersAzzam Abid DzikronNo ratings yet
- مهم PDFDocument21 pagesمهم PDFmahmood jassimNo ratings yet
- AADE 12 FTCE 37 - HilgedickDocument7 pagesAADE 12 FTCE 37 - HilgedickNabaa M. Al-KhazrajiNo ratings yet
- C StrucTesting Geister March131Document4 pagesC StrucTesting Geister March131Aamir HaideriNo ratings yet
- Turner Et Al-Stiffness and Deflection Analysis of Complex Structures-1956Document20 pagesTurner Et Al-Stiffness and Deflection Analysis of Complex Structures-1956Luis Carlos CR100% (1)
- Geotechnical Stability Analysis: Géotechnique June 2013Document43 pagesGeotechnical Stability Analysis: Géotechnique June 2013s w leeNo ratings yet
- 2006 - Lie - Static StrenghtDocument10 pages2006 - Lie - Static StrenghtFelipe CoutinhoNo ratings yet
- A Condition-Based Dynamic Segmentation of Large Systems Using ADocument15 pagesA Condition-Based Dynamic Segmentation of Large Systems Using Ajairo menesesNo ratings yet
- OTC 2881 The Dynamic Behavior of Mooring Lines: Van Sluijs and Blok, Netherlands Ship Model BasinDocument8 pagesOTC 2881 The Dynamic Behavior of Mooring Lines: Van Sluijs and Blok, Netherlands Ship Model BasinSoledad AceitunoNo ratings yet
- 8 Evaluation of Power Substation EquipmentDocument16 pages8 Evaluation of Power Substation Equipmentprraaddeej chatelNo ratings yet
- Engineering, Vol. 113, No. 3, March, 1987. ©ASCE, ISSN 0733-9445/87/0003-0429Document16 pagesEngineering, Vol. 113, No. 3, March, 1987. ©ASCE, ISSN 0733-9445/87/0003-0429Ronald SenzanoNo ratings yet
- Analysis of Beams Prestressed With Unbonded Internal or External Tendons 1Document21 pagesAnalysis of Beams Prestressed With Unbonded Internal or External Tendons 1Amin ZuraiqiNo ratings yet
- Compressive Strength Evaluation of Underwater Concrete Structures Integrating The Combination of Rebound Hardness and Ultrasonic Pulse Velocity Methods With Artificial Neural NetworksDocument5 pagesCompressive Strength Evaluation of Underwater Concrete Structures Integrating The Combination of Rebound Hardness and Ultrasonic Pulse Velocity Methods With Artificial Neural NetworksSPRANo ratings yet
- Nondestructive Dynamic Testing of Soils and PavementsDocument20 pagesNondestructive Dynamic Testing of Soils and PavementsMin Chan MoonNo ratings yet
- Mohammadi - Amplification Factor - 2002Document9 pagesMohammadi - Amplification Factor - 2002shonn.millsNo ratings yet
- ASTM D4541-09 Pull OffDocument17 pagesASTM D4541-09 Pull OffrobertabarreiroNo ratings yet
- Numerical and Experimental Evaluation of The Dynamic Performance of A Footbridge With Tuned Mass DampersDocument14 pagesNumerical and Experimental Evaluation of The Dynamic Performance of A Footbridge With Tuned Mass DampersLogan PatrickNo ratings yet
- An Introduction To Long-Range Screening Using Guided WavesDocument8 pagesAn Introduction To Long-Range Screening Using Guided WavesVikas TiwariNo ratings yet
- Damage Identification in 2D Structures Through Static ResponseDocument9 pagesDamage Identification in 2D Structures Through Static Responseashwarya_me_er5146No ratings yet
- Analysis of The Diametral Compression Test and The Applicability To Plastically Deforming MaterialsDocument12 pagesAnalysis of The Diametral Compression Test and The Applicability To Plastically Deforming MaterialsRahmat ReskaNo ratings yet
- Matsuzaki1981 PDFDocument7 pagesMatsuzaki1981 PDFKartika AhujaNo ratings yet
- (Asce) WR 1943-5452 0001518Document12 pages(Asce) WR 1943-5452 0001518Camila LinaresNo ratings yet
- Shekhar Ghosh 2023 Probabilistic Framework For Seismic Loss Assessment of Aging Highway Bridges in Crustal andDocument16 pagesShekhar Ghosh 2023 Probabilistic Framework For Seismic Loss Assessment of Aging Highway Bridges in Crustal andnagarajuNo ratings yet
- International Society For Rock MechanicsDocument13 pagesInternational Society For Rock MechanicsDavid Almanza PerezNo ratings yet
- Lin 2009Document10 pagesLin 2009Ivan BenitesNo ratings yet
- Seismic Performance of Power Transformers: Transmission and DistributionDocument3 pagesSeismic Performance of Power Transformers: Transmission and DistributionJean Briham Pardo BaqueroNo ratings yet
- 2014 May Newsletter PDFDocument2 pages2014 May Newsletter PDFs pradhanNo ratings yet
- 10 1061@ascecp 1943-5487 0000820Document11 pages10 1061@ascecp 1943-5487 0000820doni erlanggaNo ratings yet
- Compressive Behaviour of Concrete at High Strain RatesDocument26 pagesCompressive Behaviour of Concrete at High Strain RatesMohamed YasserNo ratings yet
- Rock Index Classification - Engineering ManualDocument2 pagesRock Index Classification - Engineering ManualkapsarcNo ratings yet
- Similarity Attributes From Differential Resolution ComponentsDocument9 pagesSimilarity Attributes From Differential Resolution ComponentsRaquel MacedoNo ratings yet
- Turbulence Models For Near-Wall and Low Reynolds Number Flows: A ReviewDocument12 pagesTurbulence Models For Near-Wall and Low Reynolds Number Flows: A Reviewsaleamlak muluNo ratings yet
- Seismic Soil-Structure Interaction in Buildings. II - Empirical FindingsDocument11 pagesSeismic Soil-Structure Interaction in Buildings. II - Empirical FindingsMartin Dario Mazo QuingrejoNo ratings yet
- Review Ambient Vibration TestDocument33 pagesReview Ambient Vibration TestaleksNo ratings yet
- Control of The Earthquake and Wind Dynamic Response ofDocument20 pagesControl of The Earthquake and Wind Dynamic Response ofaleksNo ratings yet
- Performance of Multiple Tuned Mass Dampers For AttenuatingDocument17 pagesPerformance of Multiple Tuned Mass Dampers For AttenuatingaleksNo ratings yet
- Viscous Damper Development and Future Trends: The Structural Design of Tall BuildingsDocument10 pagesViscous Damper Development and Future Trends: The Structural Design of Tall BuildingsAnderson UrreaNo ratings yet
- Stepinac 2021Document20 pagesStepinac 2021aleksNo ratings yet
- Ambient Vibration Testing of Historic Masonry Towers ForDocument11 pagesAmbient Vibration Testing of Historic Masonry Towers ForaleksNo ratings yet
- Event Briefing Albania Nov 26 2019Document10 pagesEvent Briefing Albania Nov 26 2019aleksNo ratings yet
- Methodsand Methodologiesforthe Seismic Hazard Assessmentfor Microzonation Purposes Tirana City CaseDocument9 pagesMethodsand Methodologiesforthe Seismic Hazard Assessmentfor Microzonation Purposes Tirana City CasealeksNo ratings yet
- Empirical Fragility Curves For Italian URM BuildingsDocument20 pagesEmpirical Fragility Curves For Italian URM BuildingsaleksNo ratings yet
- VERT Phase 1 - Albania EQ 2019Document72 pagesVERT Phase 1 - Albania EQ 2019aleksNo ratings yet
- Overview of Existing System: GeneralDocument6 pagesOverview of Existing System: GeneralaleksNo ratings yet
- IRMA Platform For The Calculation of Damages and Risks of Italian Residential BuildingsDocument25 pagesIRMA Platform For The Calculation of Damages and Risks of Italian Residential BuildingsaleksNo ratings yet
- Presentation Material GuidelineDocument22 pagesPresentation Material GuidelinealeksNo ratings yet
- UNIT V WearableDocument102 pagesUNIT V WearableajithaNo ratings yet
- Multiple Linear Regression: Diagnostics: Statistics 203: Introduction To Regression and Analysis of VarianceDocument16 pagesMultiple Linear Regression: Diagnostics: Statistics 203: Introduction To Regression and Analysis of VariancecesardakoNo ratings yet
- Ergonomics InvestmentDocument4 pagesErgonomics InvestmentLiliana Alejandra Rodriguez ZamoraNo ratings yet
- BOM For Solar Water PumpDocument11 pagesBOM For Solar Water PumpNirat PatelNo ratings yet
- Mergers and Acquisitions in Pharmaceutical SectorDocument37 pagesMergers and Acquisitions in Pharmaceutical SectorAnjali Mehra100% (2)
- Subgrade Preparation in Earth CutDocument3 pagesSubgrade Preparation in Earth Cutusama buttNo ratings yet
- IT2840D 3640D Copier Operation ManualDocument516 pagesIT2840D 3640D Copier Operation ManualChristopher CollinsNo ratings yet
- Summer Internship Project On: "Basics of PHP"Document45 pagesSummer Internship Project On: "Basics of PHP"its me Deepak yadav100% (1)
- Wheel Loader Manual Agrison PDFDocument138 pagesWheel Loader Manual Agrison PDFTravisReign Dicang02No ratings yet
- Clinical Assignment 1Document5 pagesClinical Assignment 1Muhammad Noman bin FiazNo ratings yet
- LT32567 PDFDocument4 pagesLT32567 PDFNikolayNo ratings yet
- Enidine Wire Rope IsolatorsDocument52 pagesEnidine Wire Rope IsolatorsJocaNo ratings yet
- Case Study-Hain Celestial: Student Name Institution Affiliation DateDocument5 pagesCase Study-Hain Celestial: Student Name Institution Affiliation DategeofreyNo ratings yet
- Consumer Behaviour-Kiran GDocument9 pagesConsumer Behaviour-Kiran GVaibhav KhandelwalNo ratings yet
- CSS Practical No. 14. Roll No. 32Document25 pagesCSS Practical No. 14. Roll No. 32CM5I53Umeidhasan ShaikhNo ratings yet
- Isbn 978-602-61467-0-0Document20 pagesIsbn 978-602-61467-0-0Sofhiya LbNo ratings yet
- Maluno Integrated School: Action Plan On Wins ProgramDocument1 pageMaluno Integrated School: Action Plan On Wins ProgramSherlymae Alejandro Avelino100% (2)
- Algebra 1 Vocab CardsDocument15 pagesAlgebra 1 Vocab Cardsjoero51No ratings yet
- PMP Cheat SheetDocument9 pagesPMP Cheat SheetzepededudaNo ratings yet
- S.No Company Name Location: Executive Packers and MoversDocument3 pagesS.No Company Name Location: Executive Packers and MoversAli KhanNo ratings yet
- Guide Book - Investing and Doing Business in HCMC VietnamDocument66 pagesGuide Book - Investing and Doing Business in HCMC VietnamemvaphoNo ratings yet
- SM 6Document116 pagesSM 6陳偉泓No ratings yet
- Jsa Camp Engine Service 350 HRSDocument1 pageJsa Camp Engine Service 350 HRSAdel AlKhedawyNo ratings yet
- C2601 Maintenance Manual V1 - 1Document45 pagesC2601 Maintenance Manual V1 - 1Tenri_Dio_9619No ratings yet
- Aspen Custom ModelerDocument4 pagesAspen Custom ModelerJemar LimNo ratings yet
- Design of Earth Air Tunnel To Conserve Energy - FinalDocument19 pagesDesign of Earth Air Tunnel To Conserve Energy - FinalApurva AnandNo ratings yet
- Manual de Usuario PLECSIM 4.2Document756 pagesManual de Usuario PLECSIM 4.2juansNo ratings yet
- Hammer Strength HDT-MAB Assembly ManualDocument8 pagesHammer Strength HDT-MAB Assembly ManualRida DahmounNo ratings yet
- Fundamental of HDD Technology (3) : OutlineDocument8 pagesFundamental of HDD Technology (3) : OutlineJoseMNo ratings yet
- Factory Act Gujarat PDFDocument2 pagesFactory Act Gujarat PDFKeith100% (1)