You might also like
- RFID at Ultra and Super High Frequencies: Theory and applicationFrom EverandRFID at Ultra and Super High Frequencies: Theory and applicationNo ratings yet
- The Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsFrom EverandThe Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsSylvain ClercNo ratings yet
- BRTF14: Tetra Optical Macro Slave RepeaterDocument2 pagesBRTF14: Tetra Optical Macro Slave RepeaterDmitriyNo ratings yet
- BRTF13: Tetra Optical Mini Slave RepeaterDocument2 pagesBRTF13: Tetra Optical Mini Slave RepeaterDmitriyNo ratings yet
- Juni CBSD Tech Specs - 2018.02.28 - RevDocument22 pagesJuni CBSD Tech Specs - 2018.02.28 - RevSaran KhalidNo ratings yet
- International Price List ( ) : Effective September 2006Document4 pagesInternational Price List ( ) : Effective September 2006BABAKNo ratings yet
- GQ2412-06613 DataSheet R1Document4 pagesGQ2412-06613 DataSheet R1ELNo ratings yet
- BRMF30: Tetra Optical Master RepeaterDocument4 pagesBRMF30: Tetra Optical Master RepeaterDmitriyNo ratings yet
- GD 10Document2 pagesGD 10s.anoffNo ratings yet
- Ism 868 / 915 MHZ Antenna: Part Numbers: 2195849-1Document7 pagesIsm 868 / 915 MHZ Antenna: Part Numbers: 2195849-1121234 datajktNo ratings yet
- 1.8M KA BAND ANTENNA 3180 Final 092320Document1 page1.8M KA BAND ANTENNA 3180 Final 092320ehabNo ratings yet
- Bullet III - DS 1Document2 pagesBullet III - DS 1DDAANNIIEELLNo ratings yet
- Type 23 S-Wave - 0609 - 0609-65-17DV10I-F-64K-B1 - DEDocument2 pagesType 23 S-Wave - 0609 - 0609-65-17DV10I-F-64K-B1 - DESandi FauziNo ratings yet
- Antenna Products: 3.1-10 GHZ Ultra-Wideband AntennaDocument4 pagesAntenna Products: 3.1-10 GHZ Ultra-Wideband AntennaAnand RatneshNo ratings yet
- Time Domain Far Field Antenna Measurements Without Anechoic ChamberDocument8 pagesTime Domain Far Field Antenna Measurements Without Anechoic ChamberNabil DakhliNo ratings yet
- MW - ANTENA - UHP-M 0.3m Dual Polarization Compact Class3 AntennaDocument4 pagesMW - ANTENA - UHP-M 0.3m Dual Polarization Compact Class3 AntennaAlfonso Rodrigo Garcés GarcésNo ratings yet
- Product ComparisonDocument2 pagesProduct ComparisonarisprakesaNo ratings yet
- 6 DBD HD Omni Antenna 380-430Mhz, Low Pim: BeschreibungDocument5 pages6 DBD HD Omni Antenna 380-430Mhz, Low Pim: BeschreibungManfred CzujanNo ratings yet
- Aaronia HyperLOG 30 Logper AntennasDocument9 pagesAaronia HyperLOG 30 Logper Antennas31806133No ratings yet
- G4WC 21Document2 pagesG4WC 21НиколайИгоревичНасыбуллинNo ratings yet
- RHHTT-65A-R4 - CommScopeDocument5 pagesRHHTT-65A-R4 - CommScopeSandra MeloNo ratings yet
- 1710 - 2690Mhz Pico Omni Antenna: Aw3488 Data SheetDocument1 page1710 - 2690Mhz Pico Omni Antenna: Aw3488 Data SheetGiorgi PapavaNo ratings yet
- FTR3000Document2 pagesFTR3000risqi rotbiNo ratings yet
- 80G Non-Contact Radar Level MeterDocument22 pages80G Non-Contact Radar Level MeterAliNo ratings yet
- PPT-080 110Document3 pagesPPT-080 110Emanuel CondeNo ratings yet
- TTAs Receiver Multicouplers PreselectorsDocument18 pagesTTAs Receiver Multicouplers PreselectorsRoger ReisNo ratings yet
- Basic Cal ExempleDocument4 pagesBasic Cal ExempleMartin HernandezNo ratings yet
- 003 TTC - The Coexistence of Etag and IMT Mobile System Research Report-20180913-EN PDFDocument35 pages003 TTC - The Coexistence of Etag and IMT Mobile System Research Report-20180913-EN PDFTurastoNo ratings yet
- RO-43-091821-NF-07 (MU) : Data SheetDocument2 pagesRO-43-091821-NF-07 (MU) : Data SheetRami Abu AlhigaNo ratings yet
- Fiber-5G-6G Convergence - 呂海涵教授20200213Document15 pagesFiber-5G-6G Convergence - 呂海涵教授20200213David TsuiNo ratings yet
- TRACE AAS SeriesDocument4 pagesTRACE AAS SeriesbvNo ratings yet
- 7830W CATV Optical Receiver: ApplicationsDocument4 pages7830W CATV Optical Receiver: ApplicationsLe DungNo ratings yet
- Power Your Signal: Antenna SpecificationsDocument3 pagesPower Your Signal: Antenna SpecificationsВадим ЧеховскийNo ratings yet
- CPG25 - 5in1 - V8-CFD195-5.2M - 17' - SMA SPEC (2) - 1Document22 pagesCPG25 - 5in1 - V8-CFD195-5.2M - 17' - SMA SPEC (2) - 1Airul MutaqinNo ratings yet
- Tetra & Mission Critical Solutions: Band Selective Fibre Optic RepeaterDocument2 pagesTetra & Mission Critical Solutions: Band Selective Fibre Optic RepeaterDyego FelixNo ratings yet
- G2whe-21 SuperwaveDocument2 pagesG2whe-21 SuperwaveИван КадигробNo ratings yet
- Peplink Maritime Antenna 40g DatasheetDocument13 pagesPeplink Maritime Antenna 40g DatasheetAshraf AliNo ratings yet
- Rosenberger G3WF-01 (8 Port)Document2 pagesRosenberger G3WF-01 (8 Port)dwiki.marchiano86No ratings yet
- Slim GPS Module Integrated Patch AntennaDocument2 pagesSlim GPS Module Integrated Patch AntennaGadakNo ratings yet
- 1.2M KA BAND ANTENNA RXTX 3122 Final 0917201Document1 page1.2M KA BAND ANTENNA RXTX 3122 Final 0917201LavanyaNo ratings yet
- MTS46# G2WD-21Document2 pagesMTS46# G2WD-21NataliaNo ratings yet
- Amateur Pulsar DetectionRAGDocument23 pagesAmateur Pulsar DetectionRAGeb3frnNo ratings yet
- MTS101# 2GD-21Document2 pagesMTS101# 2GD-21NataliaNo ratings yet
- 7019 XXXDocument1 page7019 XXXpandavision76No ratings yet
- G33E-21 RosenbergDocument2 pagesG33E-21 RosenbergВадим Чеховский0% (1)
- Data Sheet: S-Wave 8FW-OD-3-B2Document2 pagesData Sheet: S-Wave 8FW-OD-3-B2suongNo ratings yet
- QSFP 40G SR4 T02#121001Document7 pagesQSFP 40G SR4 T02#121001GLsun MallNo ratings yet
- RV4PX308R-V2 Product SpecificationsDocument5 pagesRV4PX308R-V2 Product SpecificationsJulián GiménezNo ratings yet
- GF300 GF320 Datasheet USDocument2 pagesGF300 GF320 Datasheet USingdimitriospino_110No ratings yet
- EarclipsensorDocument1 pageEarclipsensortapoiuNo ratings yet
- Zd220 Zd230 Zp230 Zd888 Series Eu Doc RevcDocument3 pagesZd220 Zd230 Zp230 Zd888 Series Eu Doc RevcMehmet TecimerNo ratings yet
- SightLogix SightSensor NS4 DatasheetDocument2 pagesSightLogix SightSensor NS4 DatasheetVincent Le CavalierNo ratings yet
- Technical Data Sheet: S-Wave 8FW-OD-3-B1Document2 pagesTechnical Data Sheet: S-Wave 8FW-OD-3-B1Nguyen Dang KhanhNo ratings yet
- PIN Diode With Guard Ring: First Sensor Application NoteDocument2 pagesPIN Diode With Guard Ring: First Sensor Application NoteAshraf FadelNo ratings yet
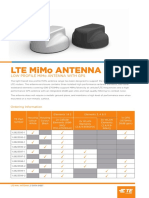
- ENG DS 1-1773880-5 LTE MiMo Antenna 0816 PDFDocument4 pagesENG DS 1-1773880-5 LTE MiMo Antenna 0816 PDFMiguel Andres VanegasNo ratings yet
- 0.85 Reyee AirMetro Overview-内部Document37 pages0.85 Reyee AirMetro Overview-内部jobs.almisyarifNo ratings yet
- Aviat ODU600v1 Technical Specification (CTR) - ETSIDocument14 pagesAviat ODU600v1 Technical Specification (CTR) - ETSISandra Milena ViracachaNo ratings yet
- JAHH-33C-R3B: General SpecificationsDocument5 pagesJAHH-33C-R3B: General SpecificationsJulian Andres VictoriaNo ratings yet
- FF PDFDocument4 pagesFF PDFKenzoe ManuelNo ratings yet
- Wireless Communications Design Handbook: Interference into Circuits: Aspects of Noise, Interference, and Environmental ConcernsFrom EverandWireless Communications Design Handbook: Interference into Circuits: Aspects of Noise, Interference, and Environmental ConcernsNo ratings yet
- Design and Implementation of Arithmetic Based FIR Filter 27-28 2023Document6 pagesDesign and Implementation of Arithmetic Based FIR Filter 27-28 2023yashamallik_83184507No ratings yet
- Cyber Security HandbookDocument76 pagesCyber Security HandbookDon WilliamNo ratings yet
- Apple Watch Series 7 FCC FilingDocument12 pagesApple Watch Series 7 FCC FilingMacRumors100% (1)
- Savoldi-SIM and USIM File System - A Forensics PerspectiveDocument24 pagesSavoldi-SIM and USIM File System - A Forensics PerspectiveAntonio SavoldiNo ratings yet
- General Catalogue 2010: Communications and SecurityDocument116 pagesGeneral Catalogue 2010: Communications and SecurityIllarions PanasenkoNo ratings yet
- Distributed SystemDocument76 pagesDistributed SystemTulipNo ratings yet
- SERVICE MANUAL Colour Television: Model No. CP21CE1Document29 pagesSERVICE MANUAL Colour Television: Model No. CP21CE1Ilham Khoirul Umam100% (2)
- IP Address Security ThreatsDocument4 pagesIP Address Security Threatsbekalu amenuNo ratings yet
- M CommerceDocument17 pagesM CommerceAbhishek SaxenaNo ratings yet
- Poornima College of Engg. Jaipur: Military RadarDocument26 pagesPoornima College of Engg. Jaipur: Military Radarsai pranayNo ratings yet
- Pulse ModulationDocument74 pagesPulse ModulationAnvesh MagantiNo ratings yet
- AIUB (whereLaborAreCreated)Document2 pagesAIUB (whereLaborAreCreated)Lone SparrowNo ratings yet
- Learning Objectives:: Topic 2.2.3 - BCD Counter Topic 2.2.4 - Decade CounterDocument35 pagesLearning Objectives:: Topic 2.2.3 - BCD Counter Topic 2.2.4 - Decade CountersuriantoNo ratings yet
- Murr Network Technology11-20Document42 pagesMurr Network Technology11-20AMNo ratings yet
- Zte Umts F-DPCH & SRB Over Hsdpa Feature GuideDocument32 pagesZte Umts F-DPCH & SRB Over Hsdpa Feature GuideFelix J. Alvarez Herrera0% (1)
- rt01 Single or Multi Electronic Notice Boards With Operating Distance Up To 1000meters Using RS485 ProtocolDocument3 pagesrt01 Single or Multi Electronic Notice Boards With Operating Distance Up To 1000meters Using RS485 ProtocolMechWindNaniNo ratings yet
- Linear and Circular Convolution: All AllDocument3 pagesLinear and Circular Convolution: All AllkumarNo ratings yet
- 1.1 4.3 Introduction To Cisco Packet Tracer PDFDocument6 pages1.1 4.3 Introduction To Cisco Packet Tracer PDFPkumarNo ratings yet
- FD1108SP 1U Pizza-Box 8PON Port EPON OLT: SpecificationsDocument2 pagesFD1108SP 1U Pizza-Box 8PON Port EPON OLT: SpecificationsNervinNo ratings yet
- 2472551319Document206 pages2472551319riskalltowinNo ratings yet
- 4.1.2 Lab - Troubleshoot Eigrp For Ipv4Document5 pages4.1.2 Lab - Troubleshoot Eigrp For Ipv4Nguyễn Gia Bảo0% (1)
- Barcode Reader-Laser PrintingDocument14 pagesBarcode Reader-Laser PrintingGeneral GuardianNo ratings yet
- Commands 3g 4G EricssonDocument8 pagesCommands 3g 4G EricssonSheyson Sanchez SuarezNo ratings yet
- Manual Activacion OltDocument12 pagesManual Activacion Oltbeninson palacios mosqueraNo ratings yet
- Wideband Fabry-Perot Resonator Antenna With Two Complementary FSS LayersDocument9 pagesWideband Fabry-Perot Resonator Antenna With Two Complementary FSS LayersBindhuNo ratings yet
- MODEL NO.: V460H1 Suffix: Le6: Product SpecificationDocument39 pagesMODEL NO.: V460H1 Suffix: Le6: Product SpecificationredzwanNo ratings yet
- IECEPpamp MembershipFormDocument1 pageIECEPpamp MembershipFormIdris Jeffrey MangueraNo ratings yet
- Sony STR-DH590: 5.2-Channel Home Theater Receiver With Bluetooth®Document5 pagesSony STR-DH590: 5.2-Channel Home Theater Receiver With Bluetooth®safetydownNo ratings yet
- Pioneer BDP 09fdDocument162 pagesPioneer BDP 09fdJirawan Sirin100% (1)
- (Richard D. Gitlin, Jeremiah F. Hayes, Stephen BDocument745 pages(Richard D. Gitlin, Jeremiah F. Hayes, Stephen BchemavalenciaNo ratings yet