You might also like
- Application of Derivatives Class 12 IscDocument70 pagesApplication of Derivatives Class 12 Iscgourav97100% (1)
- Geometric TransformationsDocument40 pagesGeometric TransformationssfundsNo ratings yet
- Em 6.20Document3 pagesEm 6.20sauciataNo ratings yet
- Multiple View Geometry Exercise Sheet 8Document3 pagesMultiple View Geometry Exercise Sheet 8Berkay ÖzerbayNo ratings yet
- Monte Carlo Integration LectureDocument8 pagesMonte Carlo Integration LectureNishant PandaNo ratings yet
- Calculus I: Functions and SequencesDocument67 pagesCalculus I: Functions and SequencesTrọng HiếuNo ratings yet
- HW 5Document5 pagesHW 5Johnathan TuckerNo ratings yet
- AM12 Optimization 2 HandoutDocument27 pagesAM12 Optimization 2 Handout张舒No ratings yet
- 04 Scipy and ScikitDocument24 pages04 Scipy and Scikitgiordano manciniNo ratings yet
- Chap1 1Document10 pagesChap1 1Jane NdindaNo ratings yet
- Lecture 1Document48 pagesLecture 1GauravNo ratings yet
- Universidad Facultad de Ciencias Básicas del Atlántico Programa de Matemáticas Vol. V , No 1, (2018) Revista Del Programa De Matemáticas Páginas: 29–35Document7 pagesUniversidad Facultad de Ciencias Básicas del Atlántico Programa de Matemáticas Vol. V , No 1, (2018) Revista Del Programa De Matemáticas Páginas: 29–35Kevin Estiven Espin EspinNo ratings yet
- 18.650 Statistics For ApplicationsDocument15 pages18.650 Statistics For ApplicationsbobNo ratings yet
- Taylor Series in Economics - Brief OverviewDocument4 pagesTaylor Series in Economics - Brief Overviewpinfeng100% (1)
- Chapter1 PDF-VersionDocument9 pagesChapter1 PDF-VersionMorgothsonNo ratings yet
- 1 Mathematical Preliminaries 2Document17 pages1 Mathematical Preliminaries 2shubhamNo ratings yet
- Lagrange Interpolation Formula ExplainedDocument5 pagesLagrange Interpolation Formula ExplainedGoura Sundar TripathyNo ratings yet
- Ejercicios de Métodos de Reconstrución de Imágenes de TC - Hoja 1Document3 pagesEjercicios de Métodos de Reconstrución de Imágenes de TC - Hoja 1antonioNo ratings yet
- Exercises For TFFY54Document25 pagesExercises For TFFY54sattar28No ratings yet
- Problem Set 4 Solutions, 18.100C, Fall 2012Document5 pagesProblem Set 4 Solutions, 18.100C, Fall 2012Muhammad TaufanNo ratings yet
- Mathematical Analysis - Continuous FunctionsDocument14 pagesMathematical Analysis - Continuous FunctionsAMV LoverNo ratings yet
- Mathematical Economics: 1 What To StudyDocument23 pagesMathematical Economics: 1 What To Studyjrvv2013gmailNo ratings yet
- 1.6.3 Continuous-time Impulse and Step Functions: Representing of a signal x (n) using a train of impulses δ (n − k)Document3 pages1.6.3 Continuous-time Impulse and Step Functions: Representing of a signal x (n) using a train of impulses δ (n − k)shriram jadhavNo ratings yet
- Chapter 12Document16 pagesChapter 12Emmanuel RamirezNo ratings yet
- Conformal Field NotesDocument7 pagesConformal Field NotesSrivatsan BalakrishnanNo ratings yet
- Lecture Notes On DifferentiationDocument12 pagesLecture Notes On DifferentiationMd Arif Ul Islam-KowshikNo ratings yet
- Calcul DiffDocument38 pagesCalcul Difffakraouicpge2019No ratings yet
- 2013 Lecture 006Document32 pages2013 Lecture 006eouahiauNo ratings yet
- Chapter 9: Numerical DifferentiationDocument22 pagesChapter 9: Numerical DifferentiationDlgash Bahri FatoNo ratings yet
- The Fundamental Theorem of CalculusDocument5 pagesThe Fundamental Theorem of CalculusDaiszyBarakaNo ratings yet
- MATH 115: Lecture XIII NotesDocument3 pagesMATH 115: Lecture XIII NotesDylan C. BeckNo ratings yet
- 01 - Lab NotesDocument8 pages01 - Lab NotesantoniobongioNo ratings yet
- AddMathLesson (5th Form Term 1, Lesson 24 - The Derivative)Document6 pagesAddMathLesson (5th Form Term 1, Lesson 24 - The Derivative)The MathematicianNo ratings yet
- 2.11.9 Autocovariance and Autocorrelation Matrices: M R M R J M R M R M K X K X E M R K XDocument5 pages2.11.9 Autocovariance and Autocorrelation Matrices: M R M R J M R M R M K X K X E M R K XMáximo Eduardo Morales PérezNo ratings yet
- Algebraic functions and models for water slide designDocument11 pagesAlgebraic functions and models for water slide designJoydeep Singh60% (5)
- OQM Lecture Note - Part 1 Introduction To Mathematical OptimisationDocument10 pagesOQM Lecture Note - Part 1 Introduction To Mathematical OptimisationdanNo ratings yet
- Basic Integration Methods MaDocument9 pagesBasic Integration Methods MaTOI 1802No ratings yet
- Harmonic Oscillator Operator Methods and Dirac NotationDocument2 pagesHarmonic Oscillator Operator Methods and Dirac NotationShhshshshshsbNo ratings yet
- On the difference π (x) − li (x) : Christine LeeDocument41 pagesOn the difference π (x) − li (x) : Christine LeeKhokon GayenNo ratings yet
- CH 8Document48 pagesCH 8marcoteran007No ratings yet
- Week 7 LectureDocument54 pagesWeek 7 LectureHANJING QUANNo ratings yet
- Wave Particle DualityDocument9 pagesWave Particle DualitydjfordeNo ratings yet
- Chapter 23Document13 pagesChapter 23Eduardo Lugo DiazNo ratings yet
- MATH 115: Lecture XXVIII NotesDocument3 pagesMATH 115: Lecture XXVIII NotesDylan C. BeckNo ratings yet
- Convolution and Correlation 10Document1 pageConvolution and Correlation 10Harshali WavreNo ratings yet
- Appendix IDocument11 pagesAppendix INeeraj BhandariNo ratings yet
- Here Are Some of The Most Commonly Used Functions:: 1. Common FunctionDocument3 pagesHere Are Some of The Most Commonly Used Functions:: 1. Common FunctionKarissa Joyce Eslao DiazNo ratings yet
- Chapter 7 Applications of DifferentiationDocument14 pagesChapter 7 Applications of Differentiationapi-3728615No ratings yet
- Fourier Analysis and Sampling Theory ExplainedDocument10 pagesFourier Analysis and Sampling Theory Explainedessi90No ratings yet
- 2021 Week 5 Chapter3 ControlDocument7 pages2021 Week 5 Chapter3 ControlAdibNo ratings yet
- CG Question BankDocument2 pagesCG Question BankpankajNo ratings yet
- Point Particle QuantizationDocument11 pagesPoint Particle QuantizationSarthak0% (1)
- R Lecture#3Document24 pagesR Lecture#3Muhammad HamdanNo ratings yet
- MCIntroDocument14 pagesMCIntroNguyễn Mai PhươngNo ratings yet
- Properties of Quantum Harmonic Oscillator: Study Goal of This LectureDocument6 pagesProperties of Quantum Harmonic Oscillator: Study Goal of This LectureAmina lbrahimNo ratings yet
- Stationary PhaseDocument20 pagesStationary PhaseJhonny RomeroNo ratings yet
- Unit 2Document4 pagesUnit 2shekhawatms2411No ratings yet
- Problem Set 3 Solution Numerical MethodsDocument11 pagesProblem Set 3 Solution Numerical MethodsAriyan JahanyarNo ratings yet
- Gen. CHEM L4Document19 pagesGen. CHEM L4Forsale1No ratings yet
- Estimation Theory EngDocument40 pagesEstimation Theory EngVe EKNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- PI-Spring 2011-Lecture Slides Weeks 13-15Document55 pagesPI-Spring 2011-Lecture Slides Weeks 13-15zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 9Document15 pagesPI-Spring 2011-Lecture Slides Week 9zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 3Document34 pagesPI-Spring 2011-Lecture Slides Week 3zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 10Document18 pagesPI-Spring 2011-Lecture Slides Week 10zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 4Document28 pagesPI-Spring 2011-Lecture Slides Week 4zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 9Document15 pagesPI-Spring 2011-Lecture Slides Week 9zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Weeks 6 - 7Document31 pagesPI-Spring 2011-Lecture Slides Weeks 6 - 7zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 11Document15 pagesPI-Spring 2011-Lecture Slides Week 11zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 10Document18 pagesPI-Spring 2011-Lecture Slides Week 10zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 4Document28 pagesPI-Spring 2011-Lecture Slides Week 4zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 11Document15 pagesPI-Spring 2011-Lecture Slides Week 11zaidNo ratings yet
- Skill and Style ApproachDocument23 pagesSkill and Style ApproachzaidNo ratings yet
- PI-Spring 2011-Lecture Slides Weeks 1&2Document27 pagesPI-Spring 2011-Lecture Slides Weeks 1&2zaidNo ratings yet
- Trait ApproachDocument21 pagesTrait ApproachzaidNo ratings yet
- Strategic LeadershipDocument47 pagesStrategic LeadershipzaidNo ratings yet
- Team LeadershipDocument42 pagesTeam LeadershipzaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 8Document28 pagesPI-Spring 2011-Lecture Slides Week 8zaidNo ratings yet
- Lecture 20Document94 pagesLecture 20zaidNo ratings yet
- PI-Spring 2011-Lecture Slides Week 3Document34 pagesPI-Spring 2011-Lecture Slides Week 3zaidNo ratings yet
- Lecture RFELFstudentsDocument32 pagesLecture RFELFstudentszaidNo ratings yet
- The Big FIVEDocument12 pagesThe Big FIVEzaidNo ratings yet
- Situational ApproachDocument17 pagesSituational ApproachzaidNo ratings yet
- Management and LeadershipDocument25 pagesManagement and LeadershipzaidNo ratings yet
- Image Processing Color TheoryDocument71 pagesImage Processing Color TheoryzaidNo ratings yet
- Lecture 19Document43 pagesLecture 19zaidNo ratings yet
- Gaussian Smoothing Techniques for Image Processing and AnalysisDocument33 pagesGaussian Smoothing Techniques for Image Processing and AnalysiszaidNo ratings yet
- Lecture 15Document56 pagesLecture 15zaidNo ratings yet
- Lecture 22Document80 pagesLecture 22zaidNo ratings yet
- Lecture 11Document79 pagesLecture 11zaidNo ratings yet
- DIP Lab Manual No 04Document12 pagesDIP Lab Manual No 04myfirstNo ratings yet
- Affine TransformationDocument6 pagesAffine Transformationbrown222No ratings yet
- Apsg Readthedocs Io en Stable - StereonetDocument80 pagesApsg Readthedocs Io en Stable - StereonetJuan VerasteguiNo ratings yet
- Homogeneous CoordinatesDocument27 pagesHomogeneous CoordinatesGogyNo ratings yet
- Chapter - 3 Image FilteringDocument79 pagesChapter - 3 Image FilteringEthio Coding SchoolNo ratings yet
- Homography (Computer Vision)Document3 pagesHomography (Computer Vision)Kostas VlahosNo ratings yet
- FMETransformers PDFDocument619 pagesFMETransformers PDFphilipNo ratings yet
- Mathematics Formulas CompiledDocument28 pagesMathematics Formulas CompiledMusirah ImranNo ratings yet
- Midterm Exam QuestionsDocument10 pagesMidterm Exam QuestionsHải Nguyễn CôngNo ratings yet
- MATH 441 Advanced Calculus Lecture NotesDocument122 pagesMATH 441 Advanced Calculus Lecture NotesDerrick Akwasi AmankwahNo ratings yet
- SEE: Towards Semi-Supervised End-to-End Scene Text RecognitionDocument8 pagesSEE: Towards Semi-Supervised End-to-End Scene Text RecognitionOdgiiv KhNo ratings yet
- Affine Transformations and MatricesDocument43 pagesAffine Transformations and MatricesMaBoNo ratings yet
- Convex Function AnalysisDocument46 pagesConvex Function AnalysisRaviKumarNo ratings yet
- Lect 1 and 2Document100 pagesLect 1 and 2renmhNo ratings yet
- FME Transformer Reference GuideDocument128 pagesFME Transformer Reference GuideMladenNo ratings yet
- Peter's Functions For Computer VisionDocument15 pagesPeter's Functions For Computer VisionDevidas JadhavNo ratings yet
- Exercicio Selecionados - Primeira AvaliaçãoDocument19 pagesExercicio Selecionados - Primeira AvaliaçãoThao TranNo ratings yet
- CG Mod 3Document51 pagesCG Mod 3Misba nausheenNo ratings yet
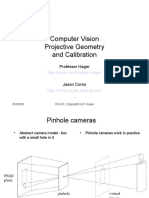
- Computer Vision Projective Geometry and Calibration: Professor HagerDocument67 pagesComputer Vision Projective Geometry and Calibration: Professor Hagersab108No ratings yet
- Planar Transformations and DisplacementsDocument33 pagesPlanar Transformations and DisplacementsRizi AdhityaNo ratings yet
- Geometric Fundamentals in Robotics: Homogeneous CoordinatesDocument32 pagesGeometric Fundamentals in Robotics: Homogeneous CoordinateseisbergeisbergNo ratings yet
- Coordinate Transformations in Surveying and Mapping: Geospatial Science RmitDocument31 pagesCoordinate Transformations in Surveying and Mapping: Geospatial Science Rmitulastuna2001No ratings yet
- Class Notes IIT DelhiDocument14 pagesClass Notes IIT DelhiAnukriti BansalNo ratings yet
- 2D Geometric TransformationsDocument35 pages2D Geometric TransformationskaliyaramNo ratings yet
- Geometric Transformation-2D UpdatedDocument57 pagesGeometric Transformation-2D Updatedzain javaidNo ratings yet
- 2D Geometrical Transformations: Foley & Van Dam, Chapter 5Document34 pages2D Geometrical Transformations: Foley & Van Dam, Chapter 5Ashutosh JhaNo ratings yet
- Sensors 22 00627Document17 pagesSensors 22 00627David CarrascoNo ratings yet