You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Testing of HT MotorsDocument16 pagesTesting of HT MotorsSam50% (4)
- ATPL Notes - ElectricsDocument23 pagesATPL Notes - ElectricsMoslem Grimaldi100% (3)
- Training Program 25.01.2014Document144 pagesTraining Program 25.01.2014waleedNo ratings yet
- ExcitationDocument45 pagesExcitationRajesh Kumar100% (1)
- CZX-12G - X - Instruction Manual - EN - General - X - R1.00 - (EN - CZXL3112.0086.0001)Document60 pagesCZX-12G - X - Instruction Manual - EN - General - X - R1.00 - (EN - CZXL3112.0086.0001)Pasopati MadeNo ratings yet
- 13-Motor Starter Principles & Techniques-REV1.0Document38 pages13-Motor Starter Principles & Techniques-REV1.0Le KhiemNo ratings yet
- GE Senix ErrorsDocument3 pagesGE Senix ErrorsAlfonso Niño71% (7)
- Overcurrent Coordination Setting Guidelines MotorsDocument9 pagesOvercurrent Coordination Setting Guidelines MotorsrobertoseniorNo ratings yet
- Operating Instructions: Variotrane Tr1 Series 2800Document137 pagesOperating Instructions: Variotrane Tr1 Series 2800adylazar7No ratings yet
- Overcurrent Coordination Setting Guidelines ConductorsDocument7 pagesOvercurrent Coordination Setting Guidelines ConductorsrobertoseniorNo ratings yet
- Line Voltage ProtectionDocument7 pagesLine Voltage ProtectionIgidio PedroNo ratings yet
- Project Manual VLT 2800 ENGDocument171 pagesProject Manual VLT 2800 ENGKrzysiek PodsiadłoNo ratings yet
- Speed Control of DC Motor Using Pulse Width ModulationDocument30 pagesSpeed Control of DC Motor Using Pulse Width ModulationRatul SarkarNo ratings yet
- Application of Dynamic Voltage Restorer in Electrical Distribution System For Voltage Sag CompensationDocument9 pagesApplication of Dynamic Voltage Restorer in Electrical Distribution System For Voltage Sag CompensationtheijesNo ratings yet
- BAMOCAR Motor ControllerDocument46 pagesBAMOCAR Motor ControllerShehzer100% (1)
- Iaetsd-Minimization of Voltage Sags and Swells Using DVRDocument8 pagesIaetsd-Minimization of Voltage Sags and Swells Using DVRiaetsdiaetsdNo ratings yet
- Gre Paper 0f 2013Document0 pagesGre Paper 0f 2013shipra51No ratings yet
- Voltage Harmonics Mitigation Using DVR: Electrical & Electronics EngineeringDocument7 pagesVoltage Harmonics Mitigation Using DVR: Electrical & Electronics EngineeringUdgam TiwariNo ratings yet
- Project Reprt333Document49 pagesProject Reprt333dhirajsingh_avit83% (6)
- Voltage Sag Swell and Harmonics Are Eliminated by DVR Dstatcom in Power System1Document8 pagesVoltage Sag Swell and Harmonics Are Eliminated by DVR Dstatcom in Power System1Indra SakiNo ratings yet
- Elc Catalog Elc PmeDocument16 pagesElc Catalog Elc Pmekvramanan_1No ratings yet
- Matrix Converter Based Direct Torque Control of Induction MotorDocument29 pagesMatrix Converter Based Direct Torque Control of Induction MotorsambitNo ratings yet
- 2100 td032 - en PDocument22 pages2100 td032 - en PByron PanchiNo ratings yet
- Advanced Motion Controls 30A20ACDocument9 pagesAdvanced Motion Controls 30A20ACServo2GoNo ratings yet
- Using 77201evm PFC Design Tips TechniquesDocument5 pagesUsing 77201evm PFC Design Tips Techniquessadegh karamyNo ratings yet
- G7M-1150-00 - OFF-LINE MAINTENANCE iiiAND ACCEPTANCE TESTING PROCEDURE FOR AC METALENCLOSEDDocument11 pagesG7M-1150-00 - OFF-LINE MAINTENANCE iiiAND ACCEPTANCE TESTING PROCEDURE FOR AC METALENCLOSEDMohammad QureshiNo ratings yet
- Thesis On Direct Torque ControlDocument6 pagesThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- BrochureDocument12 pagesBrochureDavid J LopezNo ratings yet
- MP 4000Document3 pagesMP 4000VikrantNo ratings yet
- PSP Manual 13Document10 pagesPSP Manual 13Muhammad AnsNo ratings yet
- 09 12 MG33MF02Document209 pages09 12 MG33MF02Aleksandar StankovićNo ratings yet
- UENR87840001Document14 pagesUENR87840001Brian RomanoNo ratings yet
- By Dynamic Voltage Restorerfor Power Quality ImprovementDocument6 pagesBy Dynamic Voltage Restorerfor Power Quality ImprovementSemal TankNo ratings yet
- Unit-3: (This Unit Covers Criteria P4, P5, P7, D2) Motor StartersDocument15 pagesUnit-3: (This Unit Covers Criteria P4, P5, P7, D2) Motor StartersMuhja AljaserNo ratings yet
- Power Quality Improvement Using DVRDocument6 pagesPower Quality Improvement Using DVRNirav RanaNo ratings yet
- Hardware Implementation of Single Phase Dynamic Voltage RestorerDocument6 pagesHardware Implementation of Single Phase Dynamic Voltage RestorerMeena MalarNo ratings yet
- UFS 15-22-40-110 UFS15J-22J-40J: Braking UnitDocument21 pagesUFS 15-22-40-110 UFS15J-22J-40J: Braking UnitnayanNo ratings yet
- Voltage Quality Improvement Using DVRDocument3 pagesVoltage Quality Improvement Using DVRSeid EndrisNo ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FBalraj SinghNo ratings yet
- A Dynamic Voltage Restorer For Voltage Sag Mitigation in A Refinery With Induction Motor Loads-EgyptDocument8 pagesA Dynamic Voltage Restorer For Voltage Sag Mitigation in A Refinery With Induction Motor Loads-EgyptGustavo AguayoNo ratings yet
- Overcurrent Coordination Setting Guidelines TransformersDocument7 pagesOvercurrent Coordination Setting Guidelines TransformersrobertoseniorNo ratings yet
- SSRN Id3917884Document9 pagesSSRN Id3917884Asha PatilNo ratings yet
- Using Fast Fourier Extraction Method Power Quality Improvement by DVR For Unbalanced Voltage Sag-Swell ControlDocument7 pagesUsing Fast Fourier Extraction Method Power Quality Improvement by DVR For Unbalanced Voltage Sag-Swell ControlInternational Journal of computational Engineering research (IJCER)No ratings yet
- IJETR032528Document6 pagesIJETR032528erpublicationNo ratings yet
- Power Quaity Improvement and Sag Sweel Mitigation Using DstatcomDocument7 pagesPower Quaity Improvement and Sag Sweel Mitigation Using DstatcomMinakshi Bhakkad BhattadNo ratings yet
- 22b qs001 - Mu PDocument130 pages22b qs001 - Mu PJose Butron SalasNo ratings yet
- Tga BDocument4 pagesTga Byasararafat12010No ratings yet
- Vector Surge RelayDocument20 pagesVector Surge RelayLuka YannamNo ratings yet
- Dynamic Voltage Restorer CompleteDocument17 pagesDynamic Voltage Restorer CompleteJithin SpartanZzNo ratings yet
- Power Quality Enhancement Using Custom PDocument7 pagesPower Quality Enhancement Using Custom PppNo ratings yet
- 0684 PDFDocument7 pages0684 PDFRezha YatoNo ratings yet
- E Bamocar d3Document46 pagesE Bamocar d3oscarhereNo ratings yet
- H OutDocument43 pagesH OutKhánh NguyễnNo ratings yet
- MeasurementBestPractices WillwerthHammond 0612Document18 pagesMeasurementBestPractices WillwerthHammond 0612andres monederoNo ratings yet
- Power Quality Lab Manual (EE-801)Document12 pagesPower Quality Lab Manual (EE-801)ASHU KNo ratings yet
- Simulation and Implementation of DVR For Voltage Sag CompensationDocument5 pagesSimulation and Implementation of DVR For Voltage Sag Compensationjcrodriguez83No ratings yet
- Fna SsDocument35 pagesFna SsAli Hussain Ali MahmoudNo ratings yet
- MSP Buck Regulator Closed LoopDocument4 pagesMSP Buck Regulator Closed LoopMarkoMarkovicNo ratings yet
- ASR Commissioning ChecklistDocument11 pagesASR Commissioning Checklistdinkarbhel67% (3)
- Voltage Power Supplies: Regulation of UninterruptedDocument5 pagesVoltage Power Supplies: Regulation of UninterruptedhuseyinkaksaNo ratings yet
- Vector Surge Relay - MRG20000Document20 pagesVector Surge Relay - MRG20000t_syamprasadNo ratings yet
- Electronic Soft Starters: How and Why They Work, and What They Can Do For YouDocument35 pagesElectronic Soft Starters: How and Why They Work, and What They Can Do For Youupendra35No ratings yet
- International Journal of Engineering Research and DevelopmentDocument7 pagesInternational Journal of Engineering Research and DevelopmentIJERDNo ratings yet
- Preventa XPS - XPSAK371144Document4 pagesPreventa XPS - XPSAK371144geocaustasNo ratings yet
- Writing A Technical DescriptionDocument4 pagesWriting A Technical DescriptionDenny ChanNo ratings yet
- MG 15363Document4 pagesMG 15363mamijatoNo ratings yet
- WHELEN - Replacement Parts CatalogDocument16 pagesWHELEN - Replacement Parts CatalogAndrew CoxNo ratings yet
- MV Capacitor Bank-Otra PDFDocument4 pagesMV Capacitor Bank-Otra PDFArmando TecasNo ratings yet
- Nec'S Super Low Noise HJ Fet Ne3210S01: Features Outline DimensionDocument7 pagesNec'S Super Low Noise HJ Fet Ne3210S01: Features Outline DimensionYung SangNo ratings yet
- AWP-03 Breakdown AnalysisDocument2 pagesAWP-03 Breakdown Analysisvitthal01No ratings yet
- MV Switchgear - Power Xpert FMXDocument20 pagesMV Switchgear - Power Xpert FMXTukangLas 1989No ratings yet
- Power System ProtectionDocument4 pagesPower System ProtectionNaeema MaqsudNo ratings yet
- Altivar 1200 - ATV1200A50006666Document7 pagesAltivar 1200 - ATV1200A50006666srmohapatra5086No ratings yet
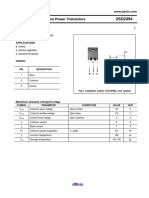
- Silicon NPN Darlington Power Transistors: DescriptionDocument3 pagesSilicon NPN Darlington Power Transistors: DescriptionDaniel Jesus LozanoNo ratings yet
- Article Siemens - Vacuum Vs SF6 TechTopics No. 03Document2 pagesArticle Siemens - Vacuum Vs SF6 TechTopics No. 03dennyyusufNo ratings yet
- BQ Instruction ManualDocument33 pagesBQ Instruction ManualLingesNo ratings yet
- Ca 438 en 1405 - LRDocument2 pagesCa 438 en 1405 - LRKhashane Willy Mohale100% (1)
- DC Machine 2Document20 pagesDC Machine 2Fadhil A. HasanNo ratings yet
- AbstractDocument20 pagesAbstractVijayaa AlmelkarNo ratings yet
- Tugas Fisika Defri AnandaDocument9 pagesTugas Fisika Defri AnandaLarasati Satiti0% (1)
- Kerja-Kerja Menaiktaraf Sistem Telemetry Serta Kerja-Kerja Berkaitan Di Kawasan Pengairan Iada Barat Laut SelangorDocument3 pagesKerja-Kerja Menaiktaraf Sistem Telemetry Serta Kerja-Kerja Berkaitan Di Kawasan Pengairan Iada Barat Laut SelangorHarith FadhilaNo ratings yet
- Reduction in Switching Loss of Phase-Shift Full-Bridge Converter Using PrestoMOS R60xxVNx SeriesDocument10 pagesReduction in Switching Loss of Phase-Shift Full-Bridge Converter Using PrestoMOS R60xxVNx Serieslokireddi kiran kumarNo ratings yet
- Pseudo-nMOS, Dynamic CMOS and Domino CMOS Logic: ELEC 5270/6270 Spring 2011 Low-Power Design of Electronic CircuitsDocument23 pagesPseudo-nMOS, Dynamic CMOS and Domino CMOS Logic: ELEC 5270/6270 Spring 2011 Low-Power Design of Electronic CircuitserdvkNo ratings yet
- TLE MAJOR TEST SET 010 Basic Electricity 1Document9 pagesTLE MAJOR TEST SET 010 Basic Electricity 1edsonlligananNo ratings yet
- RTS151KEY - Datsheet PDFDocument2 pagesRTS151KEY - Datsheet PDFSergio Solar melendezNo ratings yet
- Ask Experts: Winding Thermal ProtectionDocument2 pagesAsk Experts: Winding Thermal ProtectionRonald LlerenaNo ratings yet
- Acti 9 Iem3000 - Metsect5da060Document2 pagesActi 9 Iem3000 - Metsect5da060cristihcdNo ratings yet
- VARISTORDocument8 pagesVARISTORmani_benazzouzNo ratings yet
- What Is The Difference Between MCB, MCCB, ELCB, and RCCBDocument7 pagesWhat Is The Difference Between MCB, MCCB, ELCB, and RCCBrod8silvaNo ratings yet