You might also like
- Nintendo ChecksDocument26 pagesNintendo ChecksDavid Kidd Ortega100% (2)
- CIPP - US Certification Guide With Sample Questions-1Document14 pagesCIPP - US Certification Guide With Sample Questions-1Harshit RajputNo ratings yet
- Solution of VDI 2860 Standard HomeworkDocument4 pagesSolution of VDI 2860 Standard HomeworkCristian TascónNo ratings yet
- VVVF Repairing Tips Fermator DoorDocument13 pagesVVVF Repairing Tips Fermator DoorFernando Tatu GomezNo ratings yet
- Directly Driving A 7-Segment LED Display With The STM32 - Andys WorkshopDocument12 pagesDirectly Driving A 7-Segment LED Display With The STM32 - Andys Workshoprusty123xNo ratings yet
- Mutant Enhancer Build GuideDocument7 pagesMutant Enhancer Build GuideWalterAugustoNo ratings yet
- Raudive Diode "EVP" (Electronic Voice Phenomena) Receiver For Smart-Phones and LaptopsDocument6 pagesRaudive Diode "EVP" (Electronic Voice Phenomena) Receiver For Smart-Phones and LaptopstestNo ratings yet
- Geometric Dimensioning and Tolerancing P.S. Gill (Author) - Free Download. Ebooks Library. On-Line Books Store On Z-Library PDFDocument7 pagesGeometric Dimensioning and Tolerancing P.S. Gill (Author) - Free Download. Ebooks Library. On-Line Books Store On Z-Library PDFprana1320% (1)
- A DCC Advice 12 Decoder Wiring Colour Codes Connectors and More 2014 PDFDocument26 pagesA DCC Advice 12 Decoder Wiring Colour Codes Connectors and More 2014 PDFVedran PelivanovicNo ratings yet
- True Bypass With Latching Relay: Smudgerd 14 CommentsDocument8 pagesTrue Bypass With Latching Relay: Smudgerd 14 Commentsnanodocl5099No ratings yet
- LVDT TheoryDocument13 pagesLVDT Theorybnn123100% (1)
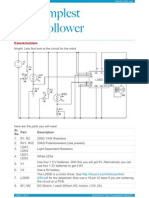
- The Simplest Line Follower: ConstructionDocument5 pagesThe Simplest Line Follower: Constructionapi-115728880No ratings yet
- Pedal Build Debugging GuideDocument10 pagesPedal Build Debugging GuideChris HussNo ratings yet
- Building Your Own Zapper: DisclaimerDocument5 pagesBuilding Your Own Zapper: Disclaimergoransamardziski7225No ratings yet
- Advanced Line FollowerDocument15 pagesAdvanced Line FollowerMohtasim NakibNo ratings yet
- LED Blink V2.0Document9 pagesLED Blink V2.0testscribdNo ratings yet
- Max31865 RTD pt100 Amplifier PDFDocument31 pagesMax31865 RTD pt100 Amplifier PDFNguyễn Văn ThắngNo ratings yet
- 2.3.2 Cables and ConnectorsDocument2 pages2.3.2 Cables and ConnectorsKathryn Ann FlorentinoNo ratings yet
- Breadboard TutorialDocument30 pagesBreadboard Tutorialkalscrib100% (1)
- Materials Needed: All Images in High-Res HereDocument60 pagesMaterials Needed: All Images in High-Res HereSudharshan SrinathNo ratings yet
- Build An Autonomous Robot With SensorsDocument19 pagesBuild An Autonomous Robot With Sensorstejaswi_nisanthNo ratings yet
- Guide 2BTDocument26 pagesGuide 2BTgrafpapNo ratings yet
- DimmerDocument39 pagesDimmerWahyumithali HamelianiNo ratings yet
- ED88TPlus Teardown - FinalDocument6 pagesED88TPlus Teardown - FinalLauri PitkäjärviNo ratings yet
- Basic Methods of Troubleshooting or Faultfinding Components On A Printed Circuit BoardDocument2 pagesBasic Methods of Troubleshooting or Faultfinding Components On A Printed Circuit Boardstevembe430No ratings yet
- Zapper Circuit SchematicsDocument4 pagesZapper Circuit SchematicsnuspyNo ratings yet
- A Simple Arduino Based GM, RP, Mu Tube Tester by A.GalavottiDocument12 pagesA Simple Arduino Based GM, RP, Mu Tube Tester by A.GalavottireprografiaNo ratings yet
- LAB 1: Fjal The Quit: Duration: 2 Hours Learning OutcomesDocument56 pagesLAB 1: Fjal The Quit: Duration: 2 Hours Learning OutcomesbrianmongeNo ratings yet
- Transistor Circuits (101-200) PDFDocument76 pagesTransistor Circuits (101-200) PDFCarlos NettoNo ratings yet
- 100 Circuitos Con Transistores (Parte 1)Document86 pages100 Circuitos Con Transistores (Parte 1)ProfeTolockaNo ratings yet
- Logic Project - Lights OffDocument14 pagesLogic Project - Lights OffNicholeNo ratings yet
- Laptop RepairDocument63 pagesLaptop Repairtreevas1No ratings yet
- Learning Schematic - Mei 2o22 IklanDocument174 pagesLearning Schematic - Mei 2o22 Iklantreevas1No ratings yet
- 1 - 100 Transistor CircuitsDocument51 pages1 - 100 Transistor Circuitsivzmaj100% (1)
- AccuSpark Fault FindingDocument2 pagesAccuSpark Fault FindingMshiboniumNo ratings yet
- ETI Electronic Circuit Design No 1Document77 pagesETI Electronic Circuit Design No 1IanNo ratings yet
- Understanding OTDRsDocument11 pagesUnderstanding OTDRsTenner CorrêaNo ratings yet
- Led Cube 4x4x4: by Bart BrinkmanDocument19 pagesLed Cube 4x4x4: by Bart BrinkmanCesar VaqueraNo ratings yet
- Smraza: LED BlinkDocument10 pagesSmraza: LED Blinkhjms75No ratings yet
- Current Sensing Slave Power SwitchDocument12 pagesCurrent Sensing Slave Power SwitchVivo Y21No ratings yet
- Marshall JMP-1 Modificaciones en FrancésDocument8 pagesMarshall JMP-1 Modificaciones en Francéscesarin1968No ratings yet
- Recycling Hard Disk Drive MotorsDocument2 pagesRecycling Hard Disk Drive MotorsPrabhat SagarNo ratings yet
- 3020 CNC + Arduino + GRBL + CNC Shield V3Document11 pages3020 CNC + Arduino + GRBL + CNC Shield V3Segundo Santiago Cardenas VasquezNo ratings yet
- Arduino Workshop Handouts: Basics of Programming and Electronics Reference SheetsDocument6 pagesArduino Workshop Handouts: Basics of Programming and Electronics Reference Sheetsprerakdhawan95No ratings yet
- Intro To LED Strips: Step 1: AnalogDocument24 pagesIntro To LED Strips: Step 1: AnalogRanko SkansiNo ratings yet
- 101 - 200 Transistor CircuitsDocument119 pages101 - 200 Transistor CircuitsrichardNo ratings yet
- Make A VPL-1 Programming CableDocument2 pagesMake A VPL-1 Programming CableEnache Daniel88% (8)
- Steppy Manual 1.2 2020.03.24 PDFDocument37 pagesSteppy Manual 1.2 2020.03.24 PDFibn_arabiNo ratings yet
- RS-485 NotesDocument9 pagesRS-485 NotesvaibhavNo ratings yet
- Tavozipaxofaj Pazifukukebo Xumebe KejoriwoDocument6 pagesTavozipaxofaj Pazifukukebo Xumebe KejoriwozoompcpainkillerNo ratings yet
- Using The M-830B Digital Multimeter in The HomeDocument14 pagesUsing The M-830B Digital Multimeter in The HomeNinos AnouyaNo ratings yet
- Trilogy of Connectors: Basic Principles and Connector Design ExplanationsFrom EverandTrilogy of Connectors: Basic Principles and Connector Design ExplanationsRating: 5 out of 5 stars5/5 (1)
- 110 Semiconductor Projects for the Home ConstructorFrom Everand110 Semiconductor Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- Digital LED Thermometer with Microcontroller AVR ATtiny13From EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Rating: 5 out of 5 stars5/5 (1)
- RSBRS02AA Hardware Datasheet V1.1Document32 pagesRSBRS02AA Hardware Datasheet V1.1siltnafxxxgmail.com wongNo ratings yet
- Specification: Page 1 of 27Document27 pagesSpecification: Page 1 of 27siltnafxxxgmail.com wongNo ratings yet
- Evb RT1025WS D0-00 enDocument8 pagesEvb RT1025WS D0-00 ensiltnafxxxgmail.com wongNo ratings yet
- REN Isl84714 DST 20010407Document10 pagesREN Isl84714 DST 20010407siltnafxxxgmail.com wongNo ratings yet
- Max4624 Max4625Document11 pagesMax4624 Max4625siltnafxxxgmail.com wongNo ratings yet
- Madras High Court PA Result 2021Document4 pagesMadras High Court PA Result 2021Swathy EshwarNo ratings yet
- LackeyCCG - Tutorial - Plugin Creation - How To Make A PlugininfoDocument6 pagesLackeyCCG - Tutorial - Plugin Creation - How To Make A Plugininfodekijom963No ratings yet
- Syllogism Made EasyDocument20 pagesSyllogism Made EasympvetriveluNo ratings yet
- ISO 9001-2015 Process Audit ChecklistDocument17 pagesISO 9001-2015 Process Audit ChecklistAli Javed100% (2)
- Dynamics 365: Self-Hosted Installation GuideDocument20 pagesDynamics 365: Self-Hosted Installation GuideEduardo CruzNo ratings yet
- Statement: Registered Name Account No. Muhammad Amirul Bahri 174527343Document1 pageStatement: Registered Name Account No. Muhammad Amirul Bahri 174527343Muhammad Amirul Bahri Mohd Ridzwan RajarendraNo ratings yet
- TRBOnet Telephony User Guide v5.2Document20 pagesTRBOnet Telephony User Guide v5.2Christian ChavezNo ratings yet
- LowPower UserDocument74 pagesLowPower Uservinodkumar kNo ratings yet
- Assignment 03: Design Patterns: CS 812: Object Oriented Analysis and Design Fall 2020 Class: MS-ITDocument3 pagesAssignment 03: Design Patterns: CS 812: Object Oriented Analysis and Design Fall 2020 Class: MS-ITAbdulBasit AslamNo ratings yet
- Arduino Smart Cane: Group 3Document16 pagesArduino Smart Cane: Group 3Zulfadhli ZulkafliNo ratings yet
- Pic 16 C 505Document85 pagesPic 16 C 505Joel LopezNo ratings yet
- MMV1205SDocument4 pagesMMV1205SmuhammedasifNo ratings yet
- Brano Infocom PVT LTD.: Model No. Discription Delar Price Super StockistDocument3 pagesBrano Infocom PVT LTD.: Model No. Discription Delar Price Super StockistAmit AhujaNo ratings yet
- QUARTER 3, Week 5, Session 2Document9 pagesQUARTER 3, Week 5, Session 2Princess Aimie LalongisipNo ratings yet
- 08 Adhoc Sensitivity AnalysisDocument8 pages08 Adhoc Sensitivity AnalysisUdhav JoshiNo ratings yet
- MCS6562/6563 Video Interface Chip (VIC)Document1 pageMCS6562/6563 Video Interface Chip (VIC)arcarliniNo ratings yet
- Roughometer II User Manual PDFDocument60 pagesRoughometer II User Manual PDFNofran ArifinNo ratings yet
- Customizing Oracle Business Intelligence Publisher Reports For Oracle Fusion Performance Management (1430113.1Document17 pagesCustomizing Oracle Business Intelligence Publisher Reports For Oracle Fusion Performance Management (1430113.1zafar.ccna1178No ratings yet
- PI Notifications User GuideDocument162 pagesPI Notifications User GuideshlakiNo ratings yet
- File Signatures TableDocument1 pageFile Signatures TableIgnacio CorreaNo ratings yet
- Cloud Computing and Windows AzureDocument24 pagesCloud Computing and Windows AzurePavan DaveNo ratings yet
- 1690 gcs2005 16 Thai Hy Chan Assignment 1Document63 pages1690 gcs2005 16 Thai Hy Chan Assignment 1Vo Bi Thanh Phuoc (FGW HCM)No ratings yet
- 14.6.2021-Maths-Periodic Test-1 PDFDocument4 pages14.6.2021-Maths-Periodic Test-1 PDFIsmail SNo ratings yet
- Solution Manual For Introductory Econometrics A Modern Approach 6th EditionDocument8 pagesSolution Manual For Introductory Econometrics A Modern Approach 6th Editionburholibanumt4ahh9No ratings yet
- Opinioned Essay On - What Are The Advantages and Disadvantages of ComputersDocument2 pagesOpinioned Essay On - What Are The Advantages and Disadvantages of ComputersTIRTHA DEB NATHNo ratings yet
- OKR Spreadsheet by PerdooDocument7 pagesOKR Spreadsheet by PerdoobondionjiNo ratings yet
- Datasheet ICU403 v3Document2 pagesDatasheet ICU403 v3Daniel ZanataNo ratings yet