You might also like
- TLC0834C, TLC0834I, TLC0838C, TLC0838I 8-Bit Analog-To-Digital Converters With Serial ControlDocument14 pagesTLC0834C, TLC0834I, TLC0838C, TLC0838I 8-Bit Analog-To-Digital Converters With Serial ControlTânia RodriguesNo ratings yet
- 3-Wire LCD Driver For CCS PIC C CompilerDocument6 pages3-Wire LCD Driver For CCS PIC C CompilerJonathan LazoNo ratings yet
- Sony Cxa3271age Fingerprint ScannerDocument16 pagesSony Cxa3271age Fingerprint ScannerPierina AstudilloNo ratings yet
- Samsung Bn41-01561a 1561b sx4 Led Uc6000Document20 pagesSamsung Bn41-01561a 1561b sx4 Led Uc6000andrick britoNo ratings yet
- 960CH TFT LCD Source Driver With TCON: OctoberDocument48 pages960CH TFT LCD Source Driver With TCON: OctoberSpecShareNo ratings yet
- CPU Dothan: Alviso 910GMLDocument54 pagesCPU Dothan: Alviso 910GMLThinh QuocNo ratings yet
- Microprocessor Project 2k17EC057Document18 pagesMicroprocessor Project 2k17EC057Devashish Pratap SinghNo ratings yet
- CXA2021S Control de Sonido Volumen SonyDocument16 pagesCXA2021S Control de Sonido Volumen SonyAlirioNo ratings yet
- K920 ROW MB H301 20140603 SchematicsDocument54 pagesK920 ROW MB H301 20140603 SchematicsPaolo GreemNo ratings yet
- NS4SL01 - MB - V13 - 0328 - 1130 - Final S14SL03 PDFDocument34 pagesNS4SL01 - MB - V13 - 0328 - 1130 - Final S14SL03 PDFrafaelNo ratings yet
- Samsung Bn41-01538a bn94-02707s sx4 19 22 Main SCH PDFDocument15 pagesSamsung Bn41-01538a bn94-02707s sx4 19 22 Main SCH PDFEveraldoNo ratings yet
- Adn002a - Instrumentation Electronics at A JunctureDocument2 pagesAdn002a - Instrumentation Electronics at A Juncturewaaf_65No ratings yet
- HX8218Document46 pagesHX8218VladimirNo ratings yet
- Asus EeePC P700 - 701 SchematicDocument48 pagesAsus EeePC P700 - 701 Schematicgalah86No ratings yet
- GA Z87P D3 1.0电路图Document33 pagesGA Z87P D3 1.0电路图1214410352No ratings yet
- DSD 2228035Document11 pagesDSD 2228035noraye1841No ratings yet
- ECE462 Motor Lab Experiment3Document14 pagesECE462 Motor Lab Experiment3eng_abdelghany1979No ratings yet
- Chapter 1: Introduction To HCS12/MC9S12 The HCS12 Microcontroller Han-Way Huang Minnesota State University, Mankato September 2009Document52 pagesChapter 1: Introduction To HCS12/MC9S12 The HCS12 Microcontroller Han-Way Huang Minnesota State University, Mankato September 2009mohaiyedinNo ratings yet
- K42 Jrmbr20er 11121822 PDFDocument97 pagesK42 Jrmbr20er 11121822 PDFAlexandru FloricicăNo ratings yet
- ADC & Compressor Block diagram for HDLC Framer and DeFramerDocument1 pageADC & Compressor Block diagram for HDLC Framer and DeFramersrinivasrao2020No ratings yet
- 4 - Processor (Multi Cycle)Document42 pages4 - Processor (Multi Cycle)xuanzzkNo ratings yet
- K42Jr block diagram schematicDocument97 pagesK42Jr block diagram schematicДмитрий МашковNo ratings yet
- Em Microelectronic - : Read/Write Analog Front End For 125Khz Rfid BasestationDocument10 pagesEm Microelectronic - : Read/Write Analog Front End For 125Khz Rfid BasestationLh TuanNo ratings yet
- Block Diagram: PowerDocument96 pagesBlock Diagram: PowerBrennan GriffinNo ratings yet
- Datasheet 80C85 (Oki)Document29 pagesDatasheet 80C85 (Oki)José AdelinoNo ratings yet
- K42JR MB R20 Er 1112 1822Document97 pagesK42JR MB R20 Er 1112 1822Debbie Waugh-BrowneNo ratings yet
- Memory Interface Circuits 80x86 Processors: Ref: Online Course On EE-390, KFUPMDocument15 pagesMemory Interface Circuits 80x86 Processors: Ref: Online Course On EE-390, KFUPMMarcus QeqqrqrrqNo ratings yet
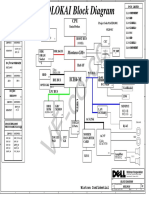
- MOLOKAI Block Diagram: VF-co-ccDocument39 pagesMOLOKAI Block Diagram: VF-co-ccWILLPC369No ratings yet
- 8051 Core Microcontroller & InterfacingDocument45 pages8051 Core Microcontroller & InterfacingsumitramotadeNo ratings yet
- 85C471 OVERVIEW: 85C471 Green PC ISA-VESA Single ChipDocument79 pages85C471 OVERVIEW: 85C471 Green PC ISA-VESA Single ChipevasiveNo ratings yet
- Gigabyte - Mobo TrainningDocument17 pagesGigabyte - Mobo Trainningablacon64No ratings yet
- Gigabyte - Mobo TrainningDocument17 pagesGigabyte - Mobo TrainningEverton DoradoNo ratings yet
- HX8218-A 960CH TFT LCD Source Driver With Built-In TCON: Preliminary Version 01 January 2005Document48 pagesHX8218-A 960CH TFT LCD Source Driver With Built-In TCON: Preliminary Version 01 January 2005GiancarloRichardRivadeneyraMirandaNo ratings yet
- Asus k42jr 1 Rev 2-0Document97 pagesAsus k42jr 1 Rev 2-0Tran MinhNo ratings yet
- 8085 Microprocessor Addressing ModesDocument13 pages8085 Microprocessor Addressing ModesHritwik GhoshNo ratings yet
- p3 Ex01 UpdDocument18 pagesp3 Ex01 UpdSOURAV KARMAKARNo ratings yet
- 01 Logic Diag - Simplified ArchDocument14 pages01 Logic Diag - Simplified ArchAshisha TulsianNo ratings yet
- Time DelayDocument27 pagesTime DelayPrincipal GEC RajkotNo ratings yet
- Design Tradeoffs: 6.004x Computation Structures Part 1 - Digital CircuitsDocument24 pagesDesign Tradeoffs: 6.004x Computation Structures Part 1 - Digital Circuitslufer0528No ratings yet
- Universal Satellite Receiver: Features Summary of BenefitsDocument3 pagesUniversal Satellite Receiver: Features Summary of BenefitsciccioNo ratings yet
- K42Jv Block DiagramDocument96 pagesK42Jv Block DiagramДмитрий МашковNo ratings yet
- TCONDocument5 pagesTCONLotteDomineNo ratings yet
- P5100 Troubleshooting PDFDocument72 pagesP5100 Troubleshooting PDFDaniel CekulNo ratings yet
- HX8802A/HX8802B Data Sheet TFT-LCD Tcon With Dac: March, 2004Document48 pagesHX8802A/HX8802B Data Sheet TFT-LCD Tcon With Dac: March, 2004Hamza Abbasi AbbasiNo ratings yet
- MS-16GB1 V30 - N14pge - S-1207a PDFDocument55 pagesMS-16GB1 V30 - N14pge - S-1207a PDFSib Repair CenterNo ratings yet
- Experiment No.: 5Document6 pagesExperiment No.: 5Dhrumil ManiyarNo ratings yet
- Features Description: CMOS Octal Latching Bus DriverDocument7 pagesFeatures Description: CMOS Octal Latching Bus DriverLuciano Benjamín Recalde CarballoNo ratings yet
- Model GA-H110-D3 Technical SpecificationsDocument50 pagesModel GA-H110-D3 Technical Specifications謝紳泳No ratings yet
- .CNÑ Î Íø - GA H110M S2PH - R10 Schematic PDFDocument44 pages.CNÑ Î Íø - GA H110M S2PH - R10 Schematic PDFvckhung263257100% (2)
- PDFDocument50 pagesPDFAdam LiviuNo ratings yet
- 8085 PRJ Schematic 1Document44 pages8085 PRJ Schematic 1Jani ServiniNo ratings yet
- Module Description HDI-050-XXS MP40 1.1Document9 pagesModule Description HDI-050-XXS MP40 1.1felipebdNo ratings yet
- Docc 004Document10 pagesDocc 004ktibqeuioNo ratings yet
- Microprocessor Architectures and Systems: RISC, CISC and DSPFrom EverandMicroprocessor Architectures and Systems: RISC, CISC and DSPRating: 4 out of 5 stars4/5 (1)
- Marco Vardaro - PHD Thesis - 2018 01 14 (137-143)Document7 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (137-143)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (144-146)Document3 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (144-146)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (154-154)Document1 pageMarco Vardaro - PHD Thesis - 2018 01 14 (154-154)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (133-136)Document4 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (133-136)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (147-153)Document7 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (147-153)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (168-192)Document25 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (168-192)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (068-072)Document5 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (068-072)mjd rNo ratings yet
- Measured squeezed beam diagnostic using balanced homodyne detectionDocument2 pagesMeasured squeezed beam diagnostic using balanced homodyne detectionmjd rNo ratings yet
- Software hardware architecture of the squeezer control systemDocument13 pagesSoftware hardware architecture of the squeezer control systemmjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (001-027)Document27 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (001-027)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (077-077)Document1 pageMarco Vardaro - PHD Thesis - 2018 01 14 (077-077)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (085-103)Document19 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (085-103)mjd rNo ratings yet
- Measurement of Weak Amplitude Signal by Using Digital Lock-In AmplifierDocument20 pagesMeasurement of Weak Amplitude Signal by Using Digital Lock-In Amplifiermjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (073-074)Document2 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (073-074)mjd rNo ratings yet
- Squeezer overview and diagramDocument1 pageSqueezer overview and diagrammjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (028-056)Document29 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (028-056)mjd rNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (066-067)Document2 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (066-067)mjd rNo ratings yet
- Controlling LEDs and LCD display with rotary encoderDocument1 pageControlling LEDs and LCD display with rotary encodermjd rNo ratings yet
- ERA1 ERA2 ERA3 ERA4 ERA5 ERA6 - MinicirDocument2 pagesERA1 ERA2 ERA3 ERA4 ERA5 ERA6 - Minicirmjd rNo ratings yet
- Autonomous Solar-Powered Vehicle as a Learning Tool in Robotics and Green EnergyDocument13 pagesAutonomous Solar-Powered Vehicle as a Learning Tool in Robotics and Green Energymjd rNo ratings yet
- طريقة حساب الوزن النوعيDocument49 pagesطريقة حساب الوزن النوعيmjd rNo ratings yet
- ReadmeDocument3 pagesReadmemjd rNo ratings yet
- VHFو UHF مكبر للصوت معDocument6 pagesVHFو UHF مكبر للصوت معmjd rNo ratings yet
- Afghanistan Ordnance ID Guide, Volume 1 PDFDocument472 pagesAfghanistan Ordnance ID Guide, Volume 1 PDFmjd rNo ratings yet
- ReadmeDocument3 pagesReadmemjd rNo ratings yet
- Dissertation Report - Rusydi - 14302Document58 pagesDissertation Report - Rusydi - 14302mjd rNo ratings yet
- Pressed 1Document8 pagesPressed 1mjd rNo ratings yet
- Phoenix 456 CC/CV (400 Volt Models) : June 2001Document40 pagesPhoenix 456 CC/CV (400 Volt Models) : June 2001mjd rNo ratings yet
- ST 2 N 3904Document6 pagesST 2 N 3904buzzrdNo ratings yet
- Panduit MP300 MODELOS ETIQUETASDocument8 pagesPanduit MP300 MODELOS ETIQUETAScesar.legoniaNo ratings yet
- Tarang Red 2.1 Speaker System Delivers Powerful SoundDocument1 pageTarang Red 2.1 Speaker System Delivers Powerful SoundTrainer Soft SkillsNo ratings yet
- Question Text: Fill in The Blanks: Write The Missing Word To Complete The SentenceDocument39 pagesQuestion Text: Fill in The Blanks: Write The Missing Word To Complete The Sentencemoncarla lagon100% (1)
- Wireless Backhaul: A Primer On Microwave and Satellite CommunicationsDocument35 pagesWireless Backhaul: A Primer On Microwave and Satellite CommunicationsFiras ZekiNo ratings yet
- 15A04502 Digital Communication Systems (2) - 1Document1 page15A04502 Digital Communication Systems (2) - 117BF1A04L7 kalyanNo ratings yet
- GNSS-SDRLIB: An Open-Source and Real-Time GNSS Software Defined Radio LibraryDocument12 pagesGNSS-SDRLIB: An Open-Source and Real-Time GNSS Software Defined Radio Librarygeorge jiNo ratings yet
- Pt. Andor Global PerkasaDocument18 pagesPt. Andor Global PerkasaTiler BongitanNo ratings yet
- EMI Troubleshooting App Note 48W 67730 0Document22 pagesEMI Troubleshooting App Note 48W 67730 0john BronsonNo ratings yet
- Datasheet Serial UsbDocument30 pagesDatasheet Serial UsbdedeherocynNo ratings yet
- Seong-Jae Min (2010)Document15 pagesSeong-Jae Min (2010)Luis JaraNo ratings yet
- RSP Spectrum Analyser V1.1 Release NotesDocument33 pagesRSP Spectrum Analyser V1.1 Release NotesLouieNo ratings yet
- 110 MSPS/140 MSPS Analog Interface For Flat Panel Displays: R R Clamp 8 A/DDocument28 pages110 MSPS/140 MSPS Analog Interface For Flat Panel Displays: R R Clamp 8 A/DLuis Angel PNo ratings yet
- FKAttend Manual2Document67 pagesFKAttend Manual2Raju KalyadapuNo ratings yet
- IAdea Digital Display Technology For Meeting Room ManagementDocument15 pagesIAdea Digital Display Technology For Meeting Room Managementfinance.rrlightingNo ratings yet
- Laser Distributor Pte LTD: Operations Hours: Mon - Saturday 11.15 Am - 7 PMDocument7 pagesLaser Distributor Pte LTD: Operations Hours: Mon - Saturday 11.15 Am - 7 PMChee JianzhiNo ratings yet
- S100Pro GSM Alarm Manual V1.0Document25 pagesS100Pro GSM Alarm Manual V1.0Insoluperez FPNo ratings yet
- CCNA Curriculum Prepares Students for In-Demand IT CareerDocument9 pagesCCNA Curriculum Prepares Students for In-Demand IT CareerAboubacar N'dji CoulibalyNo ratings yet
- Wideband Coupled-Line Coupler with High Coupling LevelDocument5 pagesWideband Coupled-Line Coupler with High Coupling LevelMunazzah TaimuriNo ratings yet
- Ada4898 1 - 4898 2Document20 pagesAda4898 1 - 4898 2FilipBlachaNo ratings yet
- 85010-0145 - EST3 Base Platform, Fire AlarmDocument4 pages85010-0145 - EST3 Base Platform, Fire AlarmmohammadNo ratings yet
- Bloomberg 27-Inch Flat Panel Display BFP200-27 FixedDocument6 pagesBloomberg 27-Inch Flat Panel Display BFP200-27 Fixedanon_45433537No ratings yet
- Documents - Pub - JVC KD Adv38 Avx33 Ma321 SM PDFDocument81 pagesDocuments - Pub - JVC KD Adv38 Avx33 Ma321 SM PDFjavierNo ratings yet
- Protect Digital Identity with Strong PasswordsDocument15 pagesProtect Digital Identity with Strong PasswordsDanielle GunterNo ratings yet
- Managed Services PPT - NewDocument34 pagesManaged Services PPT - Newvrimate100% (1)
- Legends: Mandatory: M, Optional: O Supported: S, Not Supported: NSDocument33 pagesLegends: Mandatory: M, Optional: O Supported: S, Not Supported: NSSeema ChauhanNo ratings yet
- EEZY E-Catalogue Merged Compressed (1) CompressedDocument79 pagesEEZY E-Catalogue Merged Compressed (1) CompressedHASEEBNo ratings yet
- Fortinet FortiGate 3000D Test ReportDocument2 pagesFortinet FortiGate 3000D Test ReportVivek R KoushikNo ratings yet
- Tosibox Datasheet Lock100 LR PDFDocument2 pagesTosibox Datasheet Lock100 LR PDFĐặng Trung AnhNo ratings yet
- Department of Electrical Engineering Communication SystemsDocument7 pagesDepartment of Electrical Engineering Communication SystemsBasharat AslamNo ratings yet
- Flashlink High Power 2RU Modular Frame For Up To 10 Dual-Card ModulesDocument3 pagesFlashlink High Power 2RU Modular Frame For Up To 10 Dual-Card ModulesPhuong HaNo ratings yet