You might also like
- I2C ProtocolDocument20 pagesI2C Protocoladyadesai7No ratings yet
- I C Protocol: Devesh - Samaiya@pilani - Bits-Pilani - Ac.inDocument36 pagesI C Protocol: Devesh - Samaiya@pilani - Bits-Pilani - Ac.inMordhwaj Patel100% (3)
- I2CDocument9 pagesI2CPrasanna VenkatesanNo ratings yet
- Project DesignDocument23 pagesProject DesignpadaNo ratings yet
- Inter Integrated Circuit Bus Protocol (I C) : By: Dr. Mitesh LimachiaDocument49 pagesInter Integrated Circuit Bus Protocol (I C) : By: Dr. Mitesh LimachiaJay PatelNo ratings yet
- I2C ProtocolDocument5 pagesI2C Protocolpiyushpandey100% (5)
- I2C (Inter Inegrated Communication Systems) : (Type Here)Document5 pagesI2C (Inter Inegrated Communication Systems) : (Type Here)anon_82531963No ratings yet
- Using The PIC Devices' SSP and MSSP Modules For Slave I2C CommunicationDocument20 pagesUsing The PIC Devices' SSP and MSSP Modules For Slave I2C CommunicationthelutheranknightNo ratings yet
- IoT-Lecture-9 - Networking and Communication - IIDocument25 pagesIoT-Lecture-9 - Networking and Communication - IIARNAV JAINNo ratings yet
- I2C Protocol Design For ReusabilityDocument8 pagesI2C Protocol Design For ReusabilityAkshay KashyapNo ratings yet
- Overview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia TechDocument7 pagesOverview of The Inter-Integrated Circuit (I C) Bus: 2 ECPE 4536 Microprocessor System Design II Virginia Techdineshvhaval100% (1)
- I2C (Inter Integrated Circuit) : FeaturesDocument7 pagesI2C (Inter Integrated Circuit) : Featuresvamsikrishna gollapudiNo ratings yet
- Serial Communication Protocols Part 2: Nasif MDocument26 pagesSerial Communication Protocols Part 2: Nasif MnobodyNo ratings yet
- I2C TutorialDocument4 pagesI2C TutorialDeepak Reddy100% (2)
- I2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumDocument18 pagesI2C Protocol in Fpga Using VHDL: Main Project Interim Report As A Partial Fullment of The CurriculumShuvra Saha100% (1)
- Firmware Emulation of An I2c Slave Device 12Document7 pagesFirmware Emulation of An I2c Slave Device 12Bookyman100% (2)
- I2C Protocol 1650400022Document14 pagesI2C Protocol 1650400022k cNo ratings yet
- I2C ProtocolDocument21 pagesI2C ProtocolMohd TawfiqNo ratings yet
- CENG507 Fall2020 Chap5Document42 pagesCENG507 Fall2020 Chap5Anonymous phisherNo ratings yet
- SDA - Serial Data, SCL - Serial ClockDocument10 pagesSDA - Serial Data, SCL - Serial ClockPavan Kulkarni100% (3)
- I2C Communication ProtocolDocument34 pagesI2C Communication Protocolyuosef hababaNo ratings yet
- Lecture Notes 2Document42 pagesLecture Notes 2Prabal RawatNo ratings yet
- I2c Serial ProtocolDocument9 pagesI2c Serial ProtocolShardul Deolankar100% (2)
- Using The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDocument14 pagesUsing The Mid-Range Enhanced Core PIC16 Devices' MSSP Module For Slave I C CommunicationDario Darius100% (2)
- Arm I2cDocument25 pagesArm I2cNarendra SvNo ratings yet
- I2C - UART-SPI - ProtocolsDocument8 pagesI2C - UART-SPI - ProtocolsBOUKHOBZA SOFIANENo ratings yet
- I2CDocument29 pagesI2CVidushi GheerNo ratings yet
- The I2C System Uses A Serial Data LineDocument7 pagesThe I2C System Uses A Serial Data LineJerry JamesNo ratings yet
- Survey About Communication ProtocolsDocument20 pagesSurvey About Communication Protocolstruongan15092002No ratings yet
- I2c CommunicationDocument9 pagesI2c CommunicationSanjay Sharma100% (2)
- 1-Wire Is A Device Communications Bus System Designed by Dallas Semiconductor Corp. ThatDocument5 pages1-Wire Is A Device Communications Bus System Designed by Dallas Semiconductor Corp. ThatrajeshNo ratings yet
- Principle of I2C Bus and Its Application in IC Design: Li Yifan, Mo FeiDocument9 pagesPrinciple of I2C Bus and Its Application in IC Design: Li Yifan, Mo FeiPronadeep BoraNo ratings yet
- I2 Cgroup 2Document12 pagesI2 Cgroup 2farhanNo ratings yet
- RS232 422 485 I2c SpiDocument6 pagesRS232 422 485 I2c SpiShen JinWei100% (1)
- Survey About I2C and SPI CommunicationDocument16 pagesSurvey About I2C and SPI Communicationtruongan15092002No ratings yet
- I2c Bus Contr ReportDocument13 pagesI2c Bus Contr ReportSreeshmith Sreedar100% (2)
- MicroprocessorBasedSystems Term-II Lec3 SPI and I2C InterfaceDocument39 pagesMicroprocessorBasedSystems Term-II Lec3 SPI and I2C InterfaceMohamed SalahNo ratings yet
- I2c ProtocolDocument28 pagesI2c Protocolishapatil86No ratings yet
- Lecture 13Document40 pagesLecture 13Pratik SolankiNo ratings yet
- 01 Automotive BusesDocument24 pages01 Automotive BusesbogprsNo ratings yet
- Today: Wired Embedded Networks: Characteristics and Requirements Some Embedded LansDocument24 pagesToday: Wired Embedded Networks: Characteristics and Requirements Some Embedded LansFlorin AdrianNo ratings yet
- Unit III Peripherals and Interfacing: T.Ramprakash Ap/Ece Ramco Institute of TechnologyDocument98 pagesUnit III Peripherals and Interfacing: T.Ramprakash Ap/Ece Ramco Institute of Technologyabu taherNo ratings yet
- Unit 3 Serial InterfacesDocument111 pagesUnit 3 Serial Interfacesmtechewit100% (2)
- I2C TutorialDocument9 pagesI2C TutorialLuis Angel Nina Sánchez100% (3)
- Serial Communication BasicsDocument24 pagesSerial Communication BasicsJohn Doe100% (1)
- I2c TsopDocument7 pagesI2c TsopChayan ShahNo ratings yet
- I2C InarduinoDocument22 pagesI2C Inarduinoahmad jamelNo ratings yet
- Serial Interfaces I2C, Spi, I2SDocument37 pagesSerial Interfaces I2C, Spi, I2Seugen lupu100% (2)
- 10.1 I2C Basics - EngscopeDocument8 pages10.1 I2C Basics - Engscopeshadow_smdk100% (1)
- The Physical I2C BusDocument6 pagesThe Physical I2C BusAnkit Kumar MauryaNo ratings yet
- I2C ProtocolDocument5 pagesI2C Protocolvigneshwaran100% (1)
- Implementing An I2C® ResetDocument2 pagesImplementing An I2C® Resetm3y54mNo ratings yet
- By: Eng. Mohamed Tarek.: AVR Microcontrollers - I2CDocument37 pagesBy: Eng. Mohamed Tarek.: AVR Microcontrollers - I2CMohamed Taha GhalyNo ratings yet
- Stands For: Inter-Integrated Circuit Method For Data Transfer Between Devices Serial Connection Using Only 2 Wires Optimal For Low-Speed ComponentsDocument14 pagesStands For: Inter-Integrated Circuit Method For Data Transfer Between Devices Serial Connection Using Only 2 Wires Optimal For Low-Speed Componentsapi-19646376No ratings yet
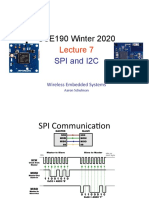
- CSE190 Winter 2020: SPI and I2CDocument17 pagesCSE190 Winter 2020: SPI and I2CliethNo ratings yet
- USART UART RS232 USB SPI I2C TTL Etc What Are All of These and How Do They Relate To Each OtherDocument4 pagesUSART UART RS232 USB SPI I2C TTL Etc What Are All of These and How Do They Relate To Each OtherMohamed Ashraf100% (1)
- NXP I2Cbus Elements SASEDocument79 pagesNXP I2Cbus Elements SASEPablo Cotan100% (2)
- Sensirion I2c Functional Description sfm3xxxDocument10 pagesSensirion I2c Functional Description sfm3xxxCesar GordilloNo ratings yet
- I2c Rev03Document17 pagesI2c Rev03varunmr100% (1)
- EE2028 - S2Ay2122 - Lecture 1 Intro and ConceptsDocument55 pagesEE2028 - S2Ay2122 - Lecture 1 Intro and ConceptsAlex CarmonaNo ratings yet
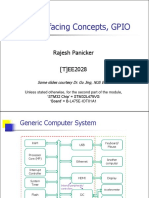
- (T) EE2028 Topic 6 Interfacing Concepts, GPIODocument42 pages(T) EE2028 Topic 6 Interfacing Concepts, GPIOAlex CarmonaNo ratings yet
- EE2028 - S2Ay2122 - Lecture 2 Assembly - Mem AddrDocument28 pagesEE2028 - S2Ay2122 - Lecture 2 Assembly - Mem AddrAlex CarmonaNo ratings yet
- EE2028 - S2Ay2122 - Lecture 4 Advanced C ProgDocument14 pagesEE2028 - S2Ay2122 - Lecture 4 Advanced C ProgAlex CarmonaNo ratings yet
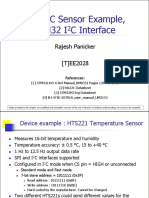
- (T) EE2028 Topic 8B I2C Sensor and STM32Document20 pages(T) EE2028 Topic 8B I2C Sensor and STM32Alex CarmonaNo ratings yet
- (T) EE2028 Topic 9B Interrupt ProgrammingDocument16 pages(T) EE2028 Topic 9B Interrupt ProgrammingAlex CarmonaNo ratings yet
- OpenZeppelin TemplateDocument41 pagesOpenZeppelin TemplateAlex CarmonaNo ratings yet
- Vsp41 Using Proxy Virtual Serial PortsDocument24 pagesVsp41 Using Proxy Virtual Serial Portsbkosa53No ratings yet
- 97 Gateprotect Gpa250 DatasheetDocument4 pages97 Gateprotect Gpa250 DatasheetNipunaGayanRuhunageNo ratings yet
- SY 780A - 760 and Sub ModelsDocument71 pagesSY 780A - 760 and Sub ModelsFlavio Miranda GonzalezNo ratings yet
- Communication InterfaceDocument10 pagesCommunication InterfaceHarini MNo ratings yet
- Core 3 Set-Up Computer ServerDocument59 pagesCore 3 Set-Up Computer ServerMichelle Navarro50% (6)
- Network Topology Is The Layout Pattern of Interconnections of The VariousDocument3 pagesNetwork Topology Is The Layout Pattern of Interconnections of The VariousManoj GuptaNo ratings yet
- Spectrum and Energy Efficiency of Uplink Massive MIMO System With D2D UnderlayDocument11 pagesSpectrum and Energy Efficiency of Uplink Massive MIMO System With D2D UnderlayBarbaros YabaciNo ratings yet
- Nsin ExamenDocument98 pagesNsin ExamenJorge VargasNo ratings yet
- 3.2-1 Install and Configure DHCPDocument57 pages3.2-1 Install and Configure DHCPMichael John ClarkeNo ratings yet
- KPIs SBS BR 9Document190 pagesKPIs SBS BR 9Denny WijayaNo ratings yet
- What Is Difference Between Congestion and BlockingDocument17 pagesWhat Is Difference Between Congestion and Blockingappu_mailNo ratings yet
- Meraki Webinar Installing Guest WiFiDocument30 pagesMeraki Webinar Installing Guest WiFiscarfeysNo ratings yet
- Report On 5g TechDocument8 pagesReport On 5g TechhaiderNo ratings yet
- Collaboration Edge Using Cisco BE6000: Cisco Validated Design GuideDocument62 pagesCollaboration Edge Using Cisco BE6000: Cisco Validated Design GuideS GNo ratings yet
- Scheduling in UMTSDocument17 pagesScheduling in UMTSHazamir HamzahNo ratings yet
- Cs Zain Mobile Network Operator Scales Montoring SystemsDocument2 pagesCs Zain Mobile Network Operator Scales Montoring SystemsAbdullah TheNo ratings yet
- NPT 1010manualDocument2 pagesNPT 1010manualGleison Santos SilvaNo ratings yet
- Training WCDMA Handover Fundamentals GSM To UMTSDocument103 pagesTraining WCDMA Handover Fundamentals GSM To UMTSObimma Ambrose Chukwudi100% (2)
- I X Network Getting StartedDocument80 pagesI X Network Getting Startedweeoam01No ratings yet
- Summer 2019 Model Answer PaperDocument20 pagesSummer 2019 Model Answer PaperGopal PradhanNo ratings yet
- Assignment of 3rd SemDocument10 pagesAssignment of 3rd SemRuhi KumariNo ratings yet
- Avoiding 3am Troubleshooting: Jack Fenimore FSE, Central and Southern OhioDocument35 pagesAvoiding 3am Troubleshooting: Jack Fenimore FSE, Central and Southern OhioCoolrRajuNo ratings yet
- CCNA R&S Overview PresentationDocument37 pagesCCNA R&S Overview PresentationManuel Huertas HonoresNo ratings yet
- BGP Vs Ospf Vs Rip Vs Mme: Battle of The Dynamic ProtocolsDocument41 pagesBGP Vs Ospf Vs Rip Vs Mme: Battle of The Dynamic ProtocolsIbarreta RhomelNo ratings yet
- Cisco ASR 5000 System Administration GuideDocument380 pagesCisco ASR 5000 System Administration Guiderohitkamahi100% (1)
- Curriculum - Vitae: Ramendra Kumar SinghDocument2 pagesCurriculum - Vitae: Ramendra Kumar SinghRipunjay MishraNo ratings yet
- NetAgentManual en V7.0Document152 pagesNetAgentManual en V7.0Anzad AzeezNo ratings yet
- Moc Lembongan 1Document64 pagesMoc Lembongan 1mr3224No ratings yet
- MCQ - 32Document4 pagesMCQ - 32Nida Bagoyboy Naticho100% (1)
- Az 104Document214 pagesAz 104Pablo MoralesNo ratings yet