You might also like
- Add A DS1307 RTC Clock To Your AVR MicrocontrollerDocument14 pagesAdd A DS1307 RTC Clock To Your AVR MicrocontrolleriburolNo ratings yet
- Interoperability Definition For IEC 870-5-101 ProtocolDocument20 pagesInteroperability Definition For IEC 870-5-101 ProtocolArun KumarNo ratings yet
- AVR313: Interfacing The PC AT Keyboard: 8-Bit Microcontroller Application NoteDocument13 pagesAVR313: Interfacing The PC AT Keyboard: 8-Bit Microcontroller Application Notejagesh chaturvediNo ratings yet
- programming Avr I2c InterfaceDocument11 pagesprogramming Avr I2c Interfacezbhp zNo ratings yet
- Sample Code For SHT21: Supporting Communication SoftwareDocument14 pagesSample Code For SHT21: Supporting Communication SoftwareMaiDungNo ratings yet
- C HandoutDocument14 pagesC HandoutAsep Bagja NugrahaNo ratings yet
- MSM 58321Document17 pagesMSM 58321Vinny TukNo ratings yet
- Keyboard InterfaceDocument16 pagesKeyboard InterfaceDinesh ChoudharyNo ratings yet
- Protocolo I2CDocument12 pagesProtocolo I2Cディエゴ水上100% (2)
- Lab Program 12 - Analog To Digital ConverterDocument21 pagesLab Program 12 - Analog To Digital ConverterRockstar UjjwalNo ratings yet
- Embeded PRJDocument7 pagesEmbeded PRJWiz Nati XvNo ratings yet
- Arm I2cDocument29 pagesArm I2cNarendra SvNo ratings yet
- I2C Use On The STM32F103R Medium Density Devices - Micromouse Online PDFDocument12 pagesI2C Use On The STM32F103R Medium Density Devices - Micromouse Online PDFNguyễn Văn ThắngNo ratings yet
- I C Master With WISHBONE Bus Interface: FeaturesDocument12 pagesI C Master With WISHBONE Bus Interface: FeaturessindNo ratings yet
- OneWire Ds18b020 Termometre UygulamasımikrocDocument4 pagesOneWire Ds18b020 Termometre Uygulamasımikrocabdulkadir dönerNo ratings yet
- Mbed BK Ed2 CH 8Document32 pagesMbed BK Ed2 CH 8Pedro Augusto PeresNo ratings yet
- Microprocessor Exam PaperDocument11 pagesMicroprocessor Exam PaperTomas MacsweeneyNo ratings yet
- AN127Document32 pagesAN127piyushpandeyNo ratings yet
- Digita Ic Tester Using MicrocontrollerDocument21 pagesDigita Ic Tester Using MicrocontrollerKiran Yedidi100% (2)
- Programming Interface For Bus Master IDE ControllerDocument6 pagesProgramming Interface For Bus Master IDE Controllerd_olexNo ratings yet
- Ardunio With Humidity SensorDocument7 pagesArdunio With Humidity SensorNanda KumarNo ratings yet
- How I2C Communication Works and How To Use It With ArduinoDocument7 pagesHow I2C Communication Works and How To Use It With ArduinoSouvik PaulNo ratings yet
- Ls 7166Document14 pagesLs 7166Tronix RepaireNo ratings yet
- Unit 5 NotesDocument25 pagesUnit 5 NoteskaustubhNo ratings yet
- Fa20-Bee-150 MP Lab Report - 04Document8 pagesFa20-Bee-150 MP Lab Report - 04Saadat KhanNo ratings yet
- Lab 09 - MESDocument8 pagesLab 09 - MESMuhammad Sarmad BaigNo ratings yet
- MODBUS Communication ProtocolDocument6 pagesMODBUS Communication ProtocolsaulnyNo ratings yet
- Ds1307 InterfacingDocument8 pagesDs1307 InterfacinggudduNo ratings yet
- Pewa700 An I2c - 1610 21866 0001 e 1118Document4 pagesPewa700 An I2c - 1610 21866 0001 e 1118Ocean AtlanticNo ratings yet
- AN4519&Document39 pagesAN4519&Utente UtenteNo ratings yet
- ModBUS Protokoll v2 6 GBDocument15 pagesModBUS Protokoll v2 6 GBdataromaNo ratings yet
- Spark V Exp 6Document10 pagesSpark V Exp 6yogeshNo ratings yet
- Programming AVR I2C Interface - Embedded Projects From Around The WebDocument11 pagesProgramming AVR I2C Interface - Embedded Projects From Around The Websuhaila38No ratings yet
- Embedded Sysytem FileDocument52 pagesEmbedded Sysytem FileGagan MaggoNo ratings yet
- 8051 Interfacing LCD 16x2Document14 pages8051 Interfacing LCD 16x2Imran Shaukat100% (3)
- Notas para Interfase Del Sensor DHT11 Al PICDocument66 pagesNotas para Interfase Del Sensor DHT11 Al PICJaime BarraganNo ratings yet
- System SoftwareDocument100 pagesSystem SoftwareasmwcwebsiteNo ratings yet
- Beginning FPGA Programming - Partie66Document5 pagesBeginning FPGA Programming - Partie66ali alilouNo ratings yet
- NEC 022 External Paper SolutionDocument13 pagesNEC 022 External Paper SolutionSachin PalNo ratings yet
- Communication Between ADC0804 and 8051Document12 pagesCommunication Between ADC0804 and 805121070106 Nguyễn Xuân ThếNo ratings yet
- CAN Protocol ENDocument7 pagesCAN Protocol ENing.ettoreNo ratings yet
- Datasheet Holtek 6542Document7 pagesDatasheet Holtek 6542Adelmo Henrique SantanaNo ratings yet
- Lab 2 - Uso de Display 7 Segmentos en Arduino. Entradas AnalogicasDocument27 pagesLab 2 - Uso de Display 7 Segmentos en Arduino. Entradas Analogicasroger david pimienta barrosNo ratings yet
- Mca Exp 1,2,3Document22 pagesMca Exp 1,2,3s.abrar.ahmed.369No ratings yet
- Using The Accelerometer On De-Soc Boards: For Quartus Prime 16.1Document17 pagesUsing The Accelerometer On De-Soc Boards: For Quartus Prime 16.1cristian flore arreolaNo ratings yet
- I 2 CDocument7 pagesI 2 CSang Nguyen Van100% (1)
- Exp2A-Closed Loop Oven Temperature Control - ItirerkanDocument4 pagesExp2A-Closed Loop Oven Temperature Control - ItirerkanITIRNo ratings yet
- 13 Serial Sinkron SPI I2CDocument47 pages13 Serial Sinkron SPI I2C092Mutmainnah TulhadawiahNo ratings yet
- Laboratory Report (For Online Lab Class Only) : ECTE333: Microcontroller Architecture and Application Spring 2020 SessionDocument8 pagesLaboratory Report (For Online Lab Class Only) : ECTE333: Microcontroller Architecture and Application Spring 2020 SessionSaad KamranNo ratings yet
- Read Me Slave 2.1Document7 pagesRead Me Slave 2.1Prasad VylaleNo ratings yet
- AVR Programming in CDocument79 pagesAVR Programming in Crizwan900100% (1)
- Attendance System Using Atmega32 PDFDocument15 pagesAttendance System Using Atmega32 PDFMOHAMMED A.M. ABUJARAD 19EE0049No ratings yet
- A Presentation On: "16x2 LCD Interfacing With AVR Atmega32 Microcontroller "Document21 pagesA Presentation On: "16x2 LCD Interfacing With AVR Atmega32 Microcontroller "siddharthaNo ratings yet
- ADC + InterruptDocument43 pagesADC + InterruptResheta Ahmed SmrityNo ratings yet
- Peripheral Interfacing + Coding: Lets Learn How To Do It in 8051 !!Document44 pagesPeripheral Interfacing + Coding: Lets Learn How To Do It in 8051 !!malhiavtarsinghNo ratings yet
- TMS320LF2407 IntroductionDocument43 pagesTMS320LF2407 IntroductionJatin Yadav100% (2)
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- EE2028 - S2Ay2122 - Lecture 1 Intro and ConceptsDocument55 pagesEE2028 - S2Ay2122 - Lecture 1 Intro and ConceptsAlex CarmonaNo ratings yet
- EE2028 - S2Ay2122 - Lecture 2 Assembly - Mem AddrDocument28 pagesEE2028 - S2Ay2122 - Lecture 2 Assembly - Mem AddrAlex CarmonaNo ratings yet
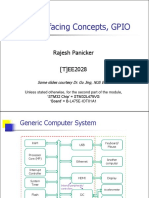
- (T) EE2028 Topic 6 Interfacing Concepts, GPIODocument42 pages(T) EE2028 Topic 6 Interfacing Concepts, GPIOAlex CarmonaNo ratings yet
- (T) EE2028 Topic 8A I2C ProtocolDocument20 pages(T) EE2028 Topic 8A I2C ProtocolAlex CarmonaNo ratings yet
- EE2028 - S2Ay2122 - Lecture 4 Advanced C ProgDocument14 pagesEE2028 - S2Ay2122 - Lecture 4 Advanced C ProgAlex CarmonaNo ratings yet
- OpenZeppelin TemplateDocument41 pagesOpenZeppelin TemplateAlex CarmonaNo ratings yet
- (T) EE2028 Topic 9B Interrupt ProgrammingDocument16 pages(T) EE2028 Topic 9B Interrupt ProgrammingAlex CarmonaNo ratings yet
- ICPMS User Manual Quick StartDocument19 pagesICPMS User Manual Quick StartLinhTrầnNo ratings yet
- Top 30 Data Analyst Interview Questions & AnswersDocument12 pagesTop 30 Data Analyst Interview Questions & AnswersrandhirkNo ratings yet
- Travel Package Recommendation SystemDocument55 pagesTravel Package Recommendation SystemVisarikaNo ratings yet
- b70 3570en PDFDocument84 pagesb70 3570en PDFAshish TripathiNo ratings yet
- Implementation of Viterbi DecoderDocument27 pagesImplementation of Viterbi DecoderKrishna Prasad PheluNo ratings yet
- Reset Epson L365 With Adjustment Program (Solve A Printer's Ink Pad Is at The End of Its Service Life)Document3 pagesReset Epson L365 With Adjustment Program (Solve A Printer's Ink Pad Is at The End of Its Service Life)Robert KuharNo ratings yet
- GPS 25 LPDocument36 pagesGPS 25 LPJanina YossarianNo ratings yet
- Toshiba TB6560 Bipolar ControllerDocument4 pagesToshiba TB6560 Bipolar ControllerStep StepNo ratings yet
- MID Test Semester 1 Oracle Database Design Ujian Ke-2Document11 pagesMID Test Semester 1 Oracle Database Design Ujian Ke-2Noor Muhammad RizkiNo ratings yet
- DriversDocument1 pageDriversbradNo ratings yet
- Ups Ge Gt6000Document41 pagesUps Ge Gt6000David Cusi VenturaNo ratings yet
- General Specifications CO-920-01: GS48D20Z01-00E-NDocument4 pagesGeneral Specifications CO-920-01: GS48D20Z01-00E-N赵先生No ratings yet
- Oop Lab ReportDocument6 pagesOop Lab ReportMd. Jahid Hasan PintuNo ratings yet
- Honeywell Sixct Step by Step Instructions For InstallationDocument16 pagesHoneywell Sixct Step by Step Instructions For InstallationAlarmClubNo ratings yet
- Special ALT CharactersDocument2 pagesSpecial ALT CharactersYervant ArabianNo ratings yet
- GitHub - Janpetzold - Prince2-Foundation-Summary - A Summary of The Necessary Knowledge For The PRINCE2 Foundation ExamDocument26 pagesGitHub - Janpetzold - Prince2-Foundation-Summary - A Summary of The Necessary Knowledge For The PRINCE2 Foundation ExamSylwia Chadaj0% (1)
- Bizagi Process Modeler: User GuideDocument521 pagesBizagi Process Modeler: User GuideantonioNo ratings yet
- Trimble CFX-750 UserGuide 4A POR CMDocument218 pagesTrimble CFX-750 UserGuide 4A POR CMValter MortaguaNo ratings yet
- Wi-Fi Solution For Government: AXILSPOT CommunicationDocument4 pagesWi-Fi Solution For Government: AXILSPOT CommunicationArgon UsmanNo ratings yet
- Chapter 2 - 3 Validating DataDocument5 pagesChapter 2 - 3 Validating DataasyrafNo ratings yet
- Darkness Within 2 - Dark Lineage Walk ThroughDocument22 pagesDarkness Within 2 - Dark Lineage Walk Throughphelps123456No ratings yet
- AirWatch Whitepaper SDKDocument6 pagesAirWatch Whitepaper SDKDioYanuar0% (1)
- Sicam Pas TRNG CC Op Sta 13Document54 pagesSicam Pas TRNG CC Op Sta 13vishadkapadiaNo ratings yet
- Computers & Security: Masike Malatji, Annlizé Marnewick, Suné Von SolmsDocument17 pagesComputers & Security: Masike Malatji, Annlizé Marnewick, Suné Von SolmsSAMI PENo ratings yet
- Mapping Internet Addresses To Physical Addresses (ARP)Document27 pagesMapping Internet Addresses To Physical Addresses (ARP)Rahul MakwanaNo ratings yet
- Experience With An IT Asset Management SystemDocument23 pagesExperience With An IT Asset Management SystemCA Ghanathe RamakrishnaNo ratings yet
- How To Get Logs From The GD-INTIP-GD3-INTIP3Document2 pagesHow To Get Logs From The GD-INTIP-GD3-INTIP3Ra YuthNo ratings yet
- John Re - Organization of Text Performance AssessmentDocument9 pagesJohn Re - Organization of Text Performance AssessmentColin PridadyNo ratings yet
- 5.securing Applications Against Unauthorized Users ObjectivesDocument40 pages5.securing Applications Against Unauthorized Users ObjectivesSuresh ThallapelliNo ratings yet
- Siva KumarDocument5 pagesSiva KumarIndresh Singh SalujaNo ratings yet