You might also like
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Proj 4Document4 pagesProj 4xyzNo ratings yet
- BESTSENSORPROGRAMMINGDocument6 pagesBESTSENSORPROGRAMMINGChickinNo ratings yet
- Ping Ultrasonic Range Finder Measures DistanceDocument5 pagesPing Ultrasonic Range Finder Measures DistanceIdris Affandy100% (1)
- Ultrasonic Distance Sensor HC-SR04Document3 pagesUltrasonic Distance Sensor HC-SR04Ghigoarta Sergiu Daniel100% (2)
- Automation Code-1Document5 pagesAutomation Code-1api-594759083No ratings yet
- PING) ) ) Ultrasonic Distance Sensor: Onic P Ressu Re Wa Ves Ping) ) ) SP EakerDocument6 pagesPING) ) ) Ultrasonic Distance Sensor: Onic P Ressu Re Wa Ves Ping) ) ) SP EakerWafa'a S. Al-HawajrehNo ratings yet
- Arduino and HC-SR04 Ultrasonic SensorDocument11 pagesArduino and HC-SR04 Ultrasonic SensorVarli ArsolNo ratings yet
- Alat Dan Bahan: 1 Arduino Uno 1 Sensor Ultrasonic SR04 2 Seven Segment Katoda 1 Breadboard Kabel JumperDocument9 pagesAlat Dan Bahan: 1 Arduino Uno 1 Sensor Ultrasonic SR04 2 Seven Segment Katoda 1 Breadboard Kabel JumperDhendy Dafeta MahardichaNo ratings yet
- Exp 09 DA-IoT E279Document5 pagesExp 09 DA-IoT E279Shreya JoshiNo ratings yet
- Exp 09 IotDocument5 pagesExp 09 IotShreya JoshiNo ratings yet
- Working With Ultrasonic Sensor Using Arduino BoardDocument6 pagesWorking With Ultrasonic Sensor Using Arduino BoardDaniel Evans100% (2)
- C++ Ultrasonic Ping Sensor Distance CodeDocument3 pagesC++ Ultrasonic Ping Sensor Distance CodeGroove GamingNo ratings yet
- Ultrasonic Sensor LabDocument11 pagesUltrasonic Sensor LabReggie PalaganasNo ratings yet
- Code of The Project With Servo and Ultrasonic SensorDocument6 pagesCode of The Project With Servo and Ultrasonic Sensorjoaquim carlos timoteoNo ratings yet
- 05 Arduino Sensors, Motors and External InterruptsDocument20 pages05 Arduino Sensors, Motors and External InterruptsMalik Adil Farooq100% (2)
- Electronic 11111Document5 pagesElectronic 11111Kimberly Mae AsisNo ratings yet
- Ultrasonic Range Finder: Step 1: Parts ListDocument10 pagesUltrasonic Range Finder: Step 1: Parts ListKo Pyae SoneNo ratings yet
- Automatic RainDocument4 pagesAutomatic Rainmahidej823No ratings yet
- SonarDocument4 pagesSonarChickinNo ratings yet
- Arduino Robotics Lab ReportDocument10 pagesArduino Robotics Lab ReportZakuan HassanNo ratings yet
- 20BCS1029 Iot 5Document5 pages20BCS1029 Iot 5hustle bustleNo ratings yet
- HC-SR04_Ultrasonic_arduino_guideDocument9 pagesHC-SR04_Ultrasonic_arduino_guideNicolas RodriguezNo ratings yet
- HC-SR04 Ultrasonic SensorDocument13 pagesHC-SR04 Ultrasonic SensorRehman ChNo ratings yet
- lab7 SR04 - Lập trình nhúngDocument10 pageslab7 SR04 - Lập trình nhúngNguyen Thi Nhat VyNo ratings yet
- Exp 5Document3 pagesExp 5jasmhmyd205No ratings yet
- Ultrasonic Sensor HC-SR04 and Arduino TutorialDocument5 pagesUltrasonic Sensor HC-SR04 and Arduino Tutorialmax100% (2)
- Job5 Iot Rani Mu'ArifahDocument9 pagesJob5 Iot Rani Mu'Arifah019Rani Mu'arifahNo ratings yet
- Ramos, Christian Audrey-Ultrasonic and LedDocument2 pagesRamos, Christian Audrey-Ultrasonic and LedMark Joseph FalcesoNo ratings yet
- Complete Guide Arduino Ultrasonic Sensor HC-SR04Document10 pagesComplete Guide Arduino Ultrasonic Sensor HC-SR04floodfreakNo ratings yet
- Ultrasound Module ModDocument5 pagesUltrasound Module ModAdam MikitzelNo ratings yet
- Ultrasonic CodeDocument2 pagesUltrasonic CodeEmmanuel UwayoNo ratings yet
- Yvonne C. Yee CPE-3C: Circuit DesignDocument4 pagesYvonne C. Yee CPE-3C: Circuit DesignGwyneth Cabelin YeeNo ratings yet
- int ledPin1Document3 pagesint ledPin1Erick Ricardo Torres CuevasNo ratings yet
- Chapter 7 and 8Document12 pagesChapter 7 and 8Amruta AvhaleNo ratings yet
- Sensor PingDocument17 pagesSensor Pingjoseluisbb_87504100% (1)
- PING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsDocument12 pagesPING) ) ) ™ Ultrasonic Distance Sensor (#28015) : Features Key SpecificationsIc MicNo ratings yet
- Sensores ArduinoDocument22 pagesSensores Arduinoslifer561No ratings yet
- Arduino Ultrasonic Sensor (HC-SR04 or HY-SRF05)Document2 pagesArduino Ultrasonic Sensor (HC-SR04 or HY-SRF05)DesiantoNo ratings yet
- Chapter 7,8,9,10Document16 pagesChapter 7,8,9,10Amruta AvhaleNo ratings yet
- Practical 6Document7 pagesPractical 6Ayushi SavaniNo ratings yet
- PING v1.2Document13 pagesPING v1.2Alejandro DiazNo ratings yet
- PING) ) ) ™ Ultrasonic Range Finder (#28015) : FeaturesDocument12 pagesPING) ) ) ™ Ultrasonic Range Finder (#28015) : FeaturesLiem LuiNo ratings yet
- Complete Guide For Ultrasonic Sensor HCDocument6 pagesComplete Guide For Ultrasonic Sensor HCEng Urimubenshi DonatNo ratings yet
- Radar For Object DetectionDocument12 pagesRadar For Object DetectionGUGULOTHU VENKATESH PRASAD B182380No ratings yet
- Distance MeasurementDocument3 pagesDistance MeasurementMeGa YuLiia WatiiNo ratings yet
- Arduino Theremin code (1)Document3 pagesArduino Theremin code (1)luis.rochaNo ratings yet
- 3719 DatasheetDocument6 pages3719 DatasheetAnkit Gupta100% (2)
- Ping Distance Sensor KickStartDocument6 pagesPing Distance Sensor KickStartJean Tello100% (1)
- Assistive Glasses For The Blind: Advanced MechatronicsDocument16 pagesAssistive Glasses For The Blind: Advanced Mechatronicsابو علي الحيدريNo ratings yet
- Arduino Lab - COVID - 5301Document9 pagesArduino Lab - COVID - 5301Bing WangNo ratings yet
- Iot I WSN Sistemi Na Mikrokontrolerskim Razvojnim Platformama #1Document12 pagesIot I WSN Sistemi Na Mikrokontrolerskim Razvojnim Platformama #1ddobriloNo ratings yet
- CourseContent - IoT and ML Training BoltDocument28 pagesCourseContent - IoT and ML Training BoltRizulNo ratings yet
- Sensor Jarak Ultrasonik dengan Aplikasi BlynkDocument4 pagesSensor Jarak Ultrasonik dengan Aplikasi BlynkFarhan Ibnu FajarNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Digital Signal Processing: Instant AccessFrom EverandDigital Signal Processing: Instant AccessRating: 3.5 out of 5 stars3.5/5 (2)
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Detecting Knocks with a Piezo SensorDocument3 pagesDetecting Knocks with a Piezo SensorxyzNo ratings yet
- Proj eDocument2 pagesProj exyzNo ratings yet
- Proj WDocument3 pagesProj WxyzNo ratings yet
- Proj QDocument1 pageProj QxyzNo ratings yet
- Proj 5Document4 pagesProj 5xyzNo ratings yet
- Arduino melody circuit plays tones on 8 ohm speakerDocument3 pagesArduino melody circuit plays tones on 8 ohm speakerxyzNo ratings yet
- Proj 3Document3 pagesProj 3xyzNo ratings yet
- NSN Handover Success Rate Improvement PlanDocument4 pagesNSN Handover Success Rate Improvement PlanBoby Sharif100% (1)
- Precision Frequency Generation PDFDocument111 pagesPrecision Frequency Generation PDFwrite2arshad_mNo ratings yet
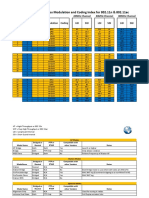
- Mikrotik Wireless Modulation and Coding Index For 802.11N & 802.11acDocument2 pagesMikrotik Wireless Modulation and Coding Index For 802.11N & 802.11acCesar Del Castillo100% (1)
- C-Data GPON OLT SFP Transceiver Class C++ Product Datasheet-V2.0Document5 pagesC-Data GPON OLT SFP Transceiver Class C++ Product Datasheet-V2.0Diego Cárdenas VelásquezNo ratings yet
- LNX-6514DS-A1M Product SpecificationsDocument3 pagesLNX-6514DS-A1M Product SpecificationsBrianNo ratings yet
- SC2332B Device Specification - V1.2Document43 pagesSC2332B Device Specification - V1.2Andrew YefremovNo ratings yet
- LL Series Little L-Per Portable Direction Finder: Operating ManualDocument15 pagesLL Series Little L-Per Portable Direction Finder: Operating Manualwingnut32067No ratings yet
- Dsip Easy SolutioDocument27 pagesDsip Easy SolutioKanika JainNo ratings yet
- Guide Using Tems PocketDocument12 pagesGuide Using Tems Pocketloduy1No ratings yet
- Reflection Coefficient and VSWRDocument5 pagesReflection Coefficient and VSWREmilio EscalanteNo ratings yet
- Triax Product Info (Triax St-Hd527ci) - 2 ScreenDocument2 pagesTriax Product Info (Triax St-Hd527ci) - 2 ScreenShobi VetriNo ratings yet
- Research Proposal 802.11acDocument5 pagesResearch Proposal 802.11acHãñzlà TåriqNo ratings yet
- SELEX Galileo (Italy) - Jane's Air Traffic ControlDocument2 pagesSELEX Galileo (Italy) - Jane's Air Traffic Controlsaaz77No ratings yet
- Application For Blanket-Licensed Earth Stations in Motion: VerviewDocument10 pagesApplication For Blanket-Licensed Earth Stations in Motion: VerviewSimon AlvarezNo ratings yet
- How To Construct A GNSS Test PlanDocument18 pagesHow To Construct A GNSS Test PlanTony ThomasNo ratings yet
- CN MCQDocument16 pagesCN MCQsaumitra2No ratings yet
- Microwave Link Engineering Design and Path Profile CalculationDocument39 pagesMicrowave Link Engineering Design and Path Profile CalculationAMIT KUMARNo ratings yet
- Secondary Synchronization Signal in 5G New RadioDocument6 pagesSecondary Synchronization Signal in 5G New Radioyigit ozcanNo ratings yet
- Airborne RadarDocument23 pagesAirborne RadarShahzad Islahi100% (1)
- Questionnaires Antennas CH 1 & 2Document5 pagesQuestionnaires Antennas CH 1 & 2Joshua CarrionNo ratings yet
- JUUKO Industrial Remote ControlDocument4 pagesJUUKO Industrial Remote Controlعلی خوشبینNo ratings yet
- How To Make Your Own FM TrapDocument2 pagesHow To Make Your Own FM TrapDinorah NardyNo ratings yet
- Measurements & Electronic Instruments Laboratory Experiment ManualDocument3 pagesMeasurements & Electronic Instruments Laboratory Experiment Manualfirst lastNo ratings yet
- Books: (1) Data Communications and Networking 4 Or5 Edition - Behrouz A. ForouzanDocument20 pagesBooks: (1) Data Communications and Networking 4 Or5 Edition - Behrouz A. Forouzansafia100% (1)
- Cisco Lead2pass 300-425 Exam Question 2022-May-06 by Marvin 88q VceDocument8 pagesCisco Lead2pass 300-425 Exam Question 2022-May-06 by Marvin 88q VceMario Aguirre HelgueroNo ratings yet
- Uhf VHF Radio Arc 182Document10 pagesUhf VHF Radio Arc 182wisnu septiantoNo ratings yet
- Telehealth Technology Assignment: 311118104055 SivaranjaniDocument6 pagesTelehealth Technology Assignment: 311118104055 SivaranjaniGajalakshmi AshokNo ratings yet
- Vol 4 - Info. Tech - INTERSYSTEM INTERFERENCE STUDY BETWEEN DVB-T AND UMTSDocument15 pagesVol 4 - Info. Tech - INTERSYSTEM INTERFERENCE STUDY BETWEEN DVB-T AND UMTSwilolud6720No ratings yet
- Elec9732-Hw2 2021Document1 pageElec9732-Hw2 2021Muhammed IrfanNo ratings yet
- Field Effect TransistorDocument11 pagesField Effect TransistorAnurag YadavNo ratings yet