You might also like
- Student Exploration: Uniform Circular MotionDocument5 pagesStudent Exploration: Uniform Circular MotionJoseph Chang80% (5)
- AGMA ISO 14179-1 Gear Reducers - Thermal CapacityDocument33 pagesAGMA ISO 14179-1 Gear Reducers - Thermal Capacitysrivalli100% (4)
- 2013 SECTION VIII - DIVION 3 SHELL EQUATIONSDocument2 pages2013 SECTION VIII - DIVION 3 SHELL EQUATIONSgabao123No ratings yet
- PHYS420 (Spring 2002) Riq Parra Homework # 2 Solutions ProblemsDocument6 pagesPHYS420 (Spring 2002) Riq Parra Homework # 2 Solutions ProblemsasknariñoNo ratings yet
- RelativityDocument39 pagesRelativityNaba LmsmNo ratings yet
- Modern Physics: (ECEG 2001)Document45 pagesModern Physics: (ECEG 2001)Tilahun TesfayeNo ratings yet
- EP1108 - Special Relativity Part 1: Shantanu DesaiDocument19 pagesEP1108 - Special Relativity Part 1: Shantanu DesaiAnirudh ReddyNo ratings yet
- Tutorial 1 AnswerDocument4 pagesTutorial 1 AnswerFook Kang HengNo ratings yet
- Unit V STRDocument13 pagesUnit V STRAryaNo ratings yet
- Analytical Solution of The 2D Ising ModelDocument74 pagesAnalytical Solution of The 2D Ising ModelbaynhamianNo ratings yet
- Galilean Transformations: Relating Space & Time Coordinates Between FramesDocument13 pagesGalilean Transformations: Relating Space & Time Coordinates Between FramesIjaz Talib-xyzNo ratings yet
- CW1 11Document2 pagesCW1 11ShootingStarPhotonsNo ratings yet
- CED 10 601A - Lepaopao, Lester Ian - Week5 OutputDocument12 pagesCED 10 601A - Lepaopao, Lester Ian - Week5 OutputLester Ian LepaopaoNo ratings yet
- Special Relativity: 1 The Invariant IntervalDocument8 pagesSpecial Relativity: 1 The Invariant IntervalBrunoNo ratings yet
- Relativity of Space, Time and MassDocument41 pagesRelativity of Space, Time and MassRM FakharNo ratings yet
- SEHS2340 Chapter 3 Vector CalculusDocument68 pagesSEHS2340 Chapter 3 Vector CalculusKaman KwokNo ratings yet
- PHY301: Assignment 4Document2 pagesPHY301: Assignment 4Gurvir SinghNo ratings yet
- Hw4 SolutionsDocument7 pagesHw4 SolutionsAn Nahl100% (1)
- TransformationOfElectricAndMagneticFields 010711A 120 126Document8 pagesTransformationOfElectricAndMagneticFields 010711A 120 126AbhishekNo ratings yet
- Classical Mechanics NotesDocument54 pagesClassical Mechanics NotesAmichai LevyNo ratings yet
- Lecture Notes in Relativity For PHYF241 EMT2: by Sunilkumar VDocument5 pagesLecture Notes in Relativity For PHYF241 EMT2: by Sunilkumar VAnonymous lfwCkQNo ratings yet
- Lie Groups, Lie Algebras, and Their RepresentationsDocument85 pagesLie Groups, Lie Algebras, and Their RepresentationssharlineNo ratings yet
- Special Relativity: Massachusetts Institute of TechnologyDocument18 pagesSpecial Relativity: Massachusetts Institute of TechnologymarioasensicollantesNo ratings yet
- HerrrelativityDocument111 pagesHerrrelativitydhananjay_257199556No ratings yet
- The Kähler geometry of toric manifoldsDocument61 pagesThe Kähler geometry of toric manifoldsIvan Coronel MarthensNo ratings yet
- Relatividad EspecialDocument22 pagesRelatividad EspecialJosé MaselNo ratings yet
- DLP Direct VariationDocument8 pagesDLP Direct Variationsusan narvasNo ratings yet
- 337 PDFDocument28 pages337 PDFEd VNo ratings yet
- Photonics2-Chap7 2Document14 pagesPhotonics2-Chap7 2video12119No ratings yet
- nts2343 PDFDocument25 pagesnts2343 PDFMizanur RahmanNo ratings yet
- DE & AREA SHEET PART(a)Document15 pagesDE & AREA SHEET PART(a)Premesh the greatNo ratings yet
- FISDAS-5 Handout For RKBIDocument145 pagesFISDAS-5 Handout For RKBIAgung Bagus DananjayaNo ratings yet
- PHYS 221 Modern Physics HW8 Notes: 1 Special RelativityDocument3 pagesPHYS 221 Modern Physics HW8 Notes: 1 Special RelativityJoNo ratings yet
- Goldstein 1 2 6 8 14 20Document7 pagesGoldstein 1 2 6 8 14 20Gopal KrishnaNo ratings yet
- Lecture 11 Notes, Electromagnetic Theory II: 1. Einstein's Principle of RelativityDocument10 pagesLecture 11 Notes, Electromagnetic Theory II: 1. Einstein's Principle of Relativity*83*22*No ratings yet
- Mechanics - Chap. 2 Problems)Document3 pagesMechanics - Chap. 2 Problems)Carlos CarranzaNo ratings yet
- A23PMSA33EDocument4 pagesA23PMSA33EkarthikeyanNo ratings yet
- JIF103 PHYSICS 1: Solving Galilean Transformations of PositionDocument11 pagesJIF103 PHYSICS 1: Solving Galilean Transformations of PositionAhmad Haikal Ahmad Mochtar0% (1)
- Application of Derivative (AOD)Document24 pagesApplication of Derivative (AOD)Raju SinghNo ratings yet
- Motion in Two and Three Dimensions: R X I y J Z KDocument11 pagesMotion in Two and Three Dimensions: R X I y J Z KWahyu SipahutarNo ratings yet
- Reaction-Diffusion Fronts Speedup in 2D Shear Flow, Slowdown in 1D Layered MediaDocument21 pagesReaction-Diffusion Fronts Speedup in 2D Shear Flow, Slowdown in 1D Layered MediaGiktonNo ratings yet
- Electrodynamics and Relativity: Immediately Not Accelerating NoDocument65 pagesElectrodynamics and Relativity: Immediately Not Accelerating No張恩睿 CHANG,EN-RUEI C24101147No ratings yet
- Control System Design ProjectDocument8 pagesControl System Design ProjectTulio Ernesto HernándezNo ratings yet
- 211803382459engineering Maths-I (2020-21) - FinalDocument1 page211803382459engineering Maths-I (2020-21) - FinalSubhasish ShitNo ratings yet
- Relativity Notes PDFDocument8 pagesRelativity Notes PDFসায়ন চক্রবর্তীNo ratings yet
- Chapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Document73 pagesChapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Patrick SibandaNo ratings yet
- 1.3 Curvilinear MotionDocument52 pages1.3 Curvilinear MotionKaren MenesesNo ratings yet
- Lecture 02Document25 pagesLecture 02Nisa Cantika BaharNo ratings yet
- Exer Eulerian AnsDocument18 pagesExer Eulerian AnsΣφήκας ΓιάννηςNo ratings yet
- Emlectures 2Document87 pagesEmlectures 2Abc GoogleNo ratings yet
- Day1 TutorialDocument7 pagesDay1 TutorialLouis JohnsonNo ratings yet
- Lecture 10 Notes, Electromagnetic Theory II: 1. Pre-Einstein RelativityDocument13 pagesLecture 10 Notes, Electromagnetic Theory II: 1. Pre-Einstein RelativityMadiwala YogenderNo ratings yet
- Lecture 12 Notes, Electromagnetic Theory II: 1. Velocities in Special RelativityDocument10 pagesLecture 12 Notes, Electromagnetic Theory II: 1. Velocities in Special Relativity*83*22*No ratings yet
- AodDocument24 pagesAodavni agarwalNo ratings yet
- Jackson 11 1 Homework SolutionDocument4 pagesJackson 11 1 Homework SolutionSoni PrayogiNo ratings yet
- Background of Special Theory of Relativity 1.1Document19 pagesBackground of Special Theory of Relativity 1.1Rasel khanNo ratings yet
- 1.2 Newtonian Relativity and Galilean TransformationsDocument7 pages1.2 Newtonian Relativity and Galilean TransformationsHarshank NimonkarNo ratings yet
- DP - Application of Derivatives PDFDocument38 pagesDP - Application of Derivatives PDFAnonymous vRpzQ2BLNo ratings yet
- Physics 43 Chapter 37 HW Set 3Document2 pagesPhysics 43 Chapter 37 HW Set 3kd1881No ratings yet
- Omega BackgroundDocument6 pagesOmega BackgroundJack Ignacio NahmíasNo ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- The Plasma Dispersion Function: The Hilbert Transform of the GaussianFrom EverandThe Plasma Dispersion Function: The Hilbert Transform of the GaussianRating: 5 out of 5 stars5/5 (1)
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Twin Paradox ExplainedDocument10 pagesTwin Paradox ExplainedLester Ian LepaopaoNo ratings yet
- CED 10 601A - Lepaopao, Lester Ian - Week2 OutputDocument7 pagesCED 10 601A - Lepaopao, Lester Ian - Week2 OutputLester Ian LepaopaoNo ratings yet
- CED 10 601A - Lepaopao, Lester Ian - Week1 OutputDocument5 pagesCED 10 601A - Lepaopao, Lester Ian - Week1 OutputLester Ian LepaopaoNo ratings yet
- CED 10 601A - Lepaopao, Lester Ian - Week5 OutputDocument12 pagesCED 10 601A - Lepaopao, Lester Ian - Week5 OutputLester Ian LepaopaoNo ratings yet
- Dr. Babasaheb Ambedkar Technological UniversityDocument5 pagesDr. Babasaheb Ambedkar Technological UniversitySomil wandhareNo ratings yet
- Chapter 3 Hydrostatic ForcesDocument7 pagesChapter 3 Hydrostatic ForcesRavindu JayalathNo ratings yet
- Flow Visualization inDocument2 pagesFlow Visualization inVeeramani ShankarNo ratings yet
- 041157X99Z RE18318-20 CompressedDocument2 pages041157X99Z RE18318-20 CompressedmhasansharifiNo ratings yet
- Solar powered water pump with single axis tracking systemDocument5 pagesSolar powered water pump with single axis tracking systemmuntasir antuNo ratings yet
- Watts Regulator Potable Water Expansion Tank Sizing ProgramDocument5 pagesWatts Regulator Potable Water Expansion Tank Sizing ProgramJohn ANo ratings yet
- Mechanics of Machines Internal Assessment Test 1Document4 pagesMechanics of Machines Internal Assessment Test 1thandialNo ratings yet
- Literature On FluidizationDocument23 pagesLiterature On FluidizationRafique AjmeriNo ratings yet
- DETERMINING CENTRE OF PRESSURE (COPDocument11 pagesDETERMINING CENTRE OF PRESSURE (COPWHfamilyNo ratings yet
- 2016 2 Sel Methodist QDocument3 pages2016 2 Sel Methodist QNur B TapriNo ratings yet
- Infiltration Rate TestDocument6 pagesInfiltration Rate TestasadNo ratings yet
- GD 07 06 Thermal CalibrationDocument29 pagesGD 07 06 Thermal CalibrationSamiran SenNo ratings yet
- A. Mathematics: Civil Engineering Application ProblemDocument2 pagesA. Mathematics: Civil Engineering Application ProblemJULIE JAMERO DELIZO, JRNo ratings yet
- CAN-CGSB 4.2 No.49-99Document16 pagesCAN-CGSB 4.2 No.49-99amaury cosmeNo ratings yet
- The Thermodynamics of Refrigeration - Principles of Natural Gas Cryogenic Process PDFDocument13 pagesThe Thermodynamics of Refrigeration - Principles of Natural Gas Cryogenic Process PDFRatnin PanityingNo ratings yet
- Mammography Quality Control Manual: - Drypro Model 793Document3 pagesMammography Quality Control Manual: - Drypro Model 793Omar Stalin Lucio RonNo ratings yet
- Advanced Particle Physics PH5811 - End SemesterDocument4 pagesAdvanced Particle Physics PH5811 - End SemesterAviteshNo ratings yet
- Malware Infographics by SlidesgoDocument33 pagesMalware Infographics by SlidesgoAfryan ArdiansyahNo ratings yet
- Code-A: Aakash Tower, 8, Pusa Road, New Delhi-110005, Ph. 011-47623456Document48 pagesCode-A: Aakash Tower, 8, Pusa Road, New Delhi-110005, Ph. 011-47623456Sujit LawareNo ratings yet
- Astm E1742Document14 pagesAstm E1742AlbertoNo ratings yet
- Boundaries PracticeDocument5 pagesBoundaries PracticeSỹ Đan TrươngNo ratings yet
- Stanyl® TE250F6Document2 pagesStanyl® TE250F6AlokWardhanSinghNo ratings yet
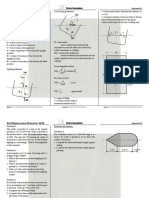
- Civil Engineering November 2020 Review - Stability of Floating BodiesDocument2 pagesCivil Engineering November 2020 Review - Stability of Floating BodiesKrysha RomaineNo ratings yet
- PHY 104 MCQ Electricity and Magnetism MCQDocument10 pagesPHY 104 MCQ Electricity and Magnetism MCQDorego TaofeeqNo ratings yet
- Metrology FundamentalsDocument51 pagesMetrology FundamentalsRahul PathakNo ratings yet
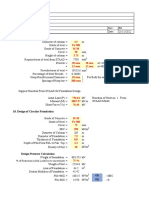
- Circular Column Design For Pole SuportDocument2 pagesCircular Column Design For Pole SuportJayNo ratings yet
- CHEM 1 LAB ACTIVITY 1 Measurements Accuracy and Precision.1BDocument2 pagesCHEM 1 LAB ACTIVITY 1 Measurements Accuracy and Precision.1BJane BeltranNo ratings yet