You might also like
- Foundational Essays on Topological Manifolds, Smoothings, and Triangulations. (AM-88), Volume 88From EverandFoundational Essays on Topological Manifolds, Smoothings, and Triangulations. (AM-88), Volume 88No ratings yet
- Finite Dimensional Vector Spaces. (AM-7), Volume 7From EverandFinite Dimensional Vector Spaces. (AM-7), Volume 7Rating: 4 out of 5 stars4/5 (9)
- The Theory of Splines and Their Applications: Mathematics in Science and Engineering: A Series of Monographs and Textbooks, Vol. 38From EverandThe Theory of Splines and Their Applications: Mathematics in Science and Engineering: A Series of Monographs and Textbooks, Vol. 38No ratings yet
- Sharipov-Course of Differential GeometryDocument132 pagesSharipov-Course of Differential Geometrymta22069471100% (2)
- A Survey and Performance Analysis of Orbit Propagators For LEO GDocument119 pagesA Survey and Performance Analysis of Orbit Propagators For LEO GKenza AyyadaNo ratings yet
- Knot Groups. Annals of Mathematics Studies. (AM-56), Volume 56From EverandKnot Groups. Annals of Mathematics Studies. (AM-56), Volume 56No ratings yet
- An Introduction to Linear Transformations in Hilbert Space. (AM-4), Volume 4From EverandAn Introduction to Linear Transformations in Hilbert Space. (AM-4), Volume 4No ratings yet
- Stability of Nonlinear Control SystemsFrom EverandStability of Nonlinear Control SystemsRating: 5 out of 5 stars5/5 (1)
- Viscoelastic Finite Element Models of The Earthquake Cycle Along Plate Boundary FaultsDocument154 pagesViscoelastic Finite Element Models of The Earthquake Cycle Along Plate Boundary FaultsEndless LoveNo ratings yet
- The Seiberg-Witten Equations and Applications to the Topology of Smooth Four-Manifolds. (MN-44), Volume 44From EverandThe Seiberg-Witten Equations and Applications to the Topology of Smooth Four-Manifolds. (MN-44), Volume 44No ratings yet
- Nonlinear Autonomous Oscillations: Analytical TheoryFrom EverandNonlinear Autonomous Oscillations: Analytical TheoryRating: 5 out of 5 stars5/5 (1)
- Body Tensor Fields in Continuum Mechanics: With Applications to Polymer RheologyFrom EverandBody Tensor Fields in Continuum Mechanics: With Applications to Polymer RheologyRating: 3 out of 5 stars3/5 (1)
- A Nonlinear Stability Analysis of Vegetative Turing Pattern Formation For An Interaction-Diffusion Plant-Surface Water Model System in An Arid Flat EnvironmentDocument94 pagesA Nonlinear Stability Analysis of Vegetative Turing Pattern Formation For An Interaction-Diffusion Plant-Surface Water Model System in An Arid Flat EnvironmentAndre LanzerNo ratings yet
- A Correlation Study of Methods of Matrix Structural Analysis: Report to the 14th Meeting, Structures and Materials Panel Advisory Group for Aeronautical Research and Development, NATO, Paris, France, July 6, 1962From EverandA Correlation Study of Methods of Matrix Structural Analysis: Report to the 14th Meeting, Structures and Materials Panel Advisory Group for Aeronautical Research and Development, NATO, Paris, France, July 6, 1962Rating: 5 out of 5 stars5/5 (1)
- Renormalization and 3-Manifolds Which Fiber over the Circle (AM-142), Volume 142From EverandRenormalization and 3-Manifolds Which Fiber over the Circle (AM-142), Volume 142No ratings yet
- Spatial Regression Analysis Using Eigenvector Spatial FilteringFrom EverandSpatial Regression Analysis Using Eigenvector Spatial FilteringNo ratings yet
- Groups & Geometric Analysis: Radon Transforms, Invariant Differential Operators and Spherical Functions: Volume 1From EverandGroups & Geometric Analysis: Radon Transforms, Invariant Differential Operators and Spherical Functions: Volume 1No ratings yet
- Marc Trullas MSC Thesis RepositoryDocument140 pagesMarc Trullas MSC Thesis RepositoryvalNo ratings yet
- PDFDocument140 pagesPDFGherghe Bogdan0% (1)
- Advances in Magnetic Resonance: Volume 4From EverandAdvances in Magnetic Resonance: Volume 4John S. WaughNo ratings yet
- The Two-Valued Iterative Systems of Mathematical Logic. (AM-5), Volume 5From EverandThe Two-Valued Iterative Systems of Mathematical Logic. (AM-5), Volume 5No ratings yet
- Metric Methods of Finsler Spaces and in the Foundations of Geometry. (AM-8)From EverandMetric Methods of Finsler Spaces and in the Foundations of Geometry. (AM-8)No ratings yet
- Discontinuous Groups and Riemann Surfaces (AM-79), Volume 79: Proceedings of the 1973 Conference at the University of Maryland. (AM-79)From EverandDiscontinuous Groups and Riemann Surfaces (AM-79), Volume 79: Proceedings of the 1973 Conference at the University of Maryland. (AM-79)Leon GreenbergNo ratings yet
- Codigo de MallaDocument207 pagesCodigo de MallaEdys BustamanteNo ratings yet
- Ian Johnston PHD Thesis Jan 1999 ExportDocument228 pagesIan Johnston PHD Thesis Jan 1999 ExportMatthew AustinNo ratings yet
- Real Submanifolds in Complex Space and Their Mappings (PMS-47)From EverandReal Submanifolds in Complex Space and Their Mappings (PMS-47)Rating: 4 out of 5 stars4/5 (2)
- Foundations of Geometry: David Hilbert, Ph. DDocument105 pagesFoundations of Geometry: David Hilbert, Ph. DLaica VasquezNo ratings yet
- Foundations of Geometry: David Hilbert, Ph. DDocument105 pagesFoundations of Geometry: David Hilbert, Ph. DEiman RedomaNo ratings yet
- Bayesian Monte Carlo Inversion of Multiple Data Sets To Image TheDocument209 pagesBayesian Monte Carlo Inversion of Multiple Data Sets To Image TheRohit kumarNo ratings yet
- Roffman Dissertation FinalDocument198 pagesRoffman Dissertation FinalRuturaj JadhavNo ratings yet
- Jennings PR Mathematics PHD 2013 PDFDocument165 pagesJennings PR Mathematics PHD 2013 PDFIts meNo ratings yet
- Development of A Generalized Quartic Equation of State For Pure FDocument171 pagesDevelopment of A Generalized Quartic Equation of State For Pure FFelipe Miguel Sánchez ClementsNo ratings yet
- Synge 1926 Geometry of DynamicsDocument77 pagesSynge 1926 Geometry of Dynamicsfirst middle lastNo ratings yet
- Theory of GearingDocument478 pagesTheory of GearingLSPI MDE1No ratings yet
- An Introduction To Differential Geometry With Applications To Elasticity CiarletDocument215 pagesAn Introduction To Differential Geometry With Applications To Elasticity CiarletLW CaolhoNo ratings yet
- Phase Transitions and Crystal Symmetry (PDFDrive)Document461 pagesPhase Transitions and Crystal Symmetry (PDFDrive)PrevalisNo ratings yet
- Multicomponent Liquid-Liquid Phase Equilibrium Using Renons AnDocument335 pagesMulticomponent Liquid-Liquid Phase Equilibrium Using Renons AnSena KulaksızNo ratings yet
- DissertationDocument334 pagesDissertationappunathan100% (1)
- Three-Dimensional Geometry and Topology, Volume 1: (PMS-35)From EverandThree-Dimensional Geometry and Topology, Volume 1: (PMS-35)Rating: 3.5 out of 5 stars3.5/5 (3)
- Isogeometric Fluid-Structure Interaction: Theory, Algorithms, and ComputationsDocument35 pagesIsogeometric Fluid-Structure Interaction: Theory, Algorithms, and Computationsmalan12No ratings yet
- Profinite Groups, Arithmetic, and Geometry. (AM-67), Volume 67From EverandProfinite Groups, Arithmetic, and Geometry. (AM-67), Volume 67No ratings yet
- ThesisDocument165 pagesThesisarp tiwNo ratings yet
- AFIT Scholar AFIT ScholarDocument107 pagesAFIT Scholar AFIT Scholardooms dayNo ratings yet
- Preview: Relating Constrained Motion To Force Through Newton's Second LawDocument24 pagesPreview: Relating Constrained Motion To Force Through Newton's Second LawLeider VargasNo ratings yet
- MQ 36884Document199 pagesMQ 36884careerNo ratings yet
- Ry Structural & Geotechnical Engineering LaboratoDocument77 pagesRy Structural & Geotechnical Engineering LaboratoHiep Hoang100% (1)
- Theory of Group Representations - A. O. Barut PDFDocument736 pagesTheory of Group Representations - A. O. Barut PDFLucius Thales da Silva100% (2)
- System Modelling of The Compact Linear Fresnel Reflector PDFDocument325 pagesSystem Modelling of The Compact Linear Fresnel Reflector PDFhagdincloobleNo ratings yet
- Efficient Construction of Discrete Adjoint Operators On Unstructured Grids by Using Complex VariablesDocument15 pagesEfficient Construction of Discrete Adjoint Operators On Unstructured Grids by Using Complex Variables35- Nava GeraldineNo ratings yet
- A System Three-Dimensional Complex Variables: NASA Technical MemorandumDocument6 pagesA System Three-Dimensional Complex Variables: NASA Technical Memorandum35- Nava GeraldineNo ratings yet
- Handbook of Geophysics and The Space EnvironmentDocument1,042 pagesHandbook of Geophysics and The Space Environment35- Nava GeraldineNo ratings yet
- Crosslink V4 N2Document52 pagesCrosslink V4 N235- Nava Geraldine100% (1)
- CalculusDocument45 pagesCalculusanonretee100% (1)
- Unit 4 STDocument22 pagesUnit 4 STSenorita xdNo ratings yet
- Engineering Sciences Department S.Y. 2020 - 2021: InstructorsDocument19 pagesEngineering Sciences Department S.Y. 2020 - 2021: InstructorsBart PascualNo ratings yet
- Math1414 Dividing PolynomialsDocument10 pagesMath1414 Dividing PolynomialsErwin AldemitaNo ratings yet
- 7 Space TrussesDocument3 pages7 Space TrussesVincent Kong100% (1)
- Homework 8 ProblemsDocument2 pagesHomework 8 ProblemsmlunguNo ratings yet
- Historia de Kerr Sobre Las Coordenadas de Kerr-SchildDocument36 pagesHistoria de Kerr Sobre Las Coordenadas de Kerr-SchildG. AlfredNo ratings yet
- Instructions:: Post Mock ExaminationDocument4 pagesInstructions:: Post Mock ExaminationAthiyo MartinNo ratings yet
- Recurrence Relations PDFDocument8 pagesRecurrence Relations PDFGunjan AgarwalNo ratings yet
- Course 1Document138 pagesCourse 1Rabaa DooriiNo ratings yet
- Complex Numbers: Vicky Neale Michaelmas Term 2019Document19 pagesComplex Numbers: Vicky Neale Michaelmas Term 2019Peter PNo ratings yet
- Mathematics - 2Document168 pagesMathematics - 2Infi Coaching CenterNo ratings yet
- G8DLL Q2W3 LC24-25Document13 pagesG8DLL Q2W3 LC24-25Reina Chenna SaulongNo ratings yet
- 20MCA203 Design & Analysis of Algorithms Core 3 1 0 4: 3/2/1: High/Medium/LowDocument7 pages20MCA203 Design & Analysis of Algorithms Core 3 1 0 4: 3/2/1: High/Medium/LowNAJIYA NAZRIN P NNo ratings yet
- M SC Physics Syllabus&SchemeDocument20 pagesM SC Physics Syllabus&SchemeTejas ChuteNo ratings yet
- OpMan LPDocument11 pagesOpMan LPprincess_camarilloNo ratings yet
- Systems and Control Theory An Introduction: A. AstolfiDocument158 pagesSystems and Control Theory An Introduction: A. AstolfiAnonymous EeHdJwKeNo ratings yet
- Convergence of Spectral Method in Time For Burgers' EquationDocument7 pagesConvergence of Spectral Method in Time For Burgers' EquationDurga SivakumarNo ratings yet
- Calculus DLL Week 9Document10 pagesCalculus DLL Week 9audie mataNo ratings yet
- Controlador Do Claudio SáDocument4 pagesControlador Do Claudio SáZé VoadoraNo ratings yet
- Solutions To Exercise Set 1, TMA4220: September 2, 2015Document5 pagesSolutions To Exercise Set 1, TMA4220: September 2, 2015Salomon HagenimanaNo ratings yet
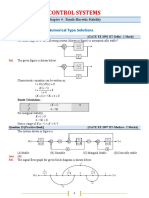
- Control Systems: GATE Objective & Numerical Type SolutionsDocument14 pagesControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNo ratings yet
- Aero Structures-Basic ElasticityDocument54 pagesAero Structures-Basic ElasticityFaryal BatoolNo ratings yet
- 2 - Lecture - Differential Analysis of Fluid FlowDocument95 pages2 - Lecture - Differential Analysis of Fluid FlowManxar MasudNo ratings yet
- ITF-DPP#01 Mains PDFDocument3 pagesITF-DPP#01 Mains PDFAkshit MaheshwariNo ratings yet
- Lectures On Classical Mechanics-3Document3 pagesLectures On Classical Mechanics-3Abhijit Kar Gupta100% (2)
- Integer Programming: The Branch and Bound MethodDocument14 pagesInteger Programming: The Branch and Bound MethodRana AhmedNo ratings yet
- Slab Design by Wood Armer MethodDocument2 pagesSlab Design by Wood Armer MethodUmesh Patil75% (4)
- BMAT101L Module2 Tutorial SheetDocument2 pagesBMAT101L Module2 Tutorial Sheetsneha sehgalNo ratings yet
- A2 Paper 3 7357Document28 pagesA2 Paper 3 7357Orion BlaqueNo ratings yet