You might also like
- Advances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Document34 pagesAdvances in The Modelling of Motorcycle Dynamics: Multibody System Dynamics October 2004Tyrone BerryNo ratings yet
- Ijret - Comparative Study of A Flexible and Rigid Two Degree of Freedom Half Car ModelDocument14 pagesIjret - Comparative Study of A Flexible and Rigid Two Degree of Freedom Half Car ModelInternational Journal of Research in Engineering and TechnologyNo ratings yet
- A Multibody Tool For The Optimization of The SuspeDocument11 pagesA Multibody Tool For The Optimization of The SuspeMei Arief HindartoNo ratings yet
- Dynamics of Motorcycle Using Flexible Elements: Salvatore Massimo Oliveri, Michele Calì and Leonardo CatalanoDocument10 pagesDynamics of Motorcycle Using Flexible Elements: Salvatore Massimo Oliveri, Michele Calì and Leonardo CatalanoettypasewangNo ratings yet
- Automated Visco-Elastic Analysis of Large Scale Inertia-Variant Spatial VehiclesDocument14 pagesAutomated Visco-Elastic Analysis of Large Scale Inertia-Variant Spatial VehiclesCleves AxiomaNo ratings yet
- Theoretical and Experimental Efficiency Analysis of Multi-Degrees-of-Freedom Epicyclic Gear TrainsDocument21 pagesTheoretical and Experimental Efficiency Analysis of Multi-Degrees-of-Freedom Epicyclic Gear TrainsAmin ShafanezhadNo ratings yet
- Tyre Effective Radius and Vehicle Velocity Estimation: A Variable Structure Observer SolutionDocument6 pagesTyre Effective Radius and Vehicle Velocity Estimation: A Variable Structure Observer Solutionkishan1234No ratings yet
- Dynamical Analysis Double Wishbone RGDocument19 pagesDynamical Analysis Double Wishbone RGGlorius CarmenNo ratings yet
- Motorcycle DynamicsDocument10 pagesMotorcycle DynamicsNilay SrivastavaNo ratings yet
- About The Preliminary Design of The Suspension SPRDocument7 pagesAbout The Preliminary Design of The Suspension SPRalinNo ratings yet
- Optimal Design of Motorcycle Rear Suspension Systems Using Genetic AlgorithmsDocument9 pagesOptimal Design of Motorcycle Rear Suspension Systems Using Genetic AlgorithmsRitesh RajNo ratings yet
- RoverDocument21 pagesRoverBHAVYA KHANNANo ratings yet
- Gyroscopic Stabilization of Unstable Vehicles: Configurations, Dynamics and ControlDocument19 pagesGyroscopic Stabilization of Unstable Vehicles: Configurations, Dynamics and ControlIrfanNo ratings yet
- A Study On The Modeling of A Hexacopter: December 2015Document9 pagesA Study On The Modeling of A Hexacopter: December 2015nkofodileNo ratings yet
- 16-Paper - Lateral Control of Front-Wheel-Steering PDFDocument46 pages16-Paper - Lateral Control of Front-Wheel-Steering PDFSri Harsha DannanaNo ratings yet
- DiwheelPaper v3Document10 pagesDiwheelPaper v3Sunita SinghNo ratings yet
- Machines and Mechanisms CourseworkDocument30 pagesMachines and Mechanisms Courseworksaad hussainNo ratings yet
- Optimal Design of Motorcycle Rear Suspension Systems Using Genetic AlgorithmsDocument9 pagesOptimal Design of Motorcycle Rear Suspension Systems Using Genetic AlgorithmsNHƯ NGUYỄN THANHNo ratings yet
- Mechanical Systems and Signal Processing: J. Parra, Cristián Molina VicuñaDocument13 pagesMechanical Systems and Signal Processing: J. Parra, Cristián Molina VicuñaKurniawan E PNo ratings yet
- Multilink 5 LinksDocument18 pagesMultilink 5 LinkstotyNo ratings yet
- The Effect of Rider's Passive Steering Impedance On Motorcycle Stability: Identification and AnalysisDocument14 pagesThe Effect of Rider's Passive Steering Impedance On Motorcycle Stability: Identification and AnalysisJoan Ferrao GenescàNo ratings yet
- Experiment4 Group3Document43 pagesExperiment4 Group3debojit.dasNo ratings yet
- Modelling of Tilting and Steering Control System FDocument7 pagesModelling of Tilting and Steering Control System FKhaled N ShmaitNo ratings yet
- 1 s2.0 S0307904X18304487 MainDocument19 pages1 s2.0 S0307904X18304487 MainDesign NarayanawindpowerNo ratings yet
- Vehicle Modeling Using BGDocument11 pagesVehicle Modeling Using BGDanish MoinNo ratings yet
- Eu25900906 PDFDocument7 pagesEu25900906 PDFNicu SavaNo ratings yet
- Machines 09 00245 v2Document34 pagesMachines 09 00245 v2Martí carboNo ratings yet
- Research ArticleDocument15 pagesResearch Articleganesh naniNo ratings yet
- An Advanced Multibody Model For The Analysis of Motorcycle DynamicsDocument7 pagesAn Advanced Multibody Model For The Analysis of Motorcycle DynamicsKakarla SantoshNo ratings yet
- (23540192 - Mechanics and Mechanical Engineering) Kinematic and Dynamic Analysis For A New MacPherson Strut Suspension SystemDocument16 pages(23540192 - Mechanics and Mechanical Engineering) Kinematic and Dynamic Analysis For A New MacPherson Strut Suspension SystemIulian NgiNo ratings yet
- Vehicles 03 00019 v2Document30 pagesVehicles 03 00019 v2Pierre GanNo ratings yet
- Final ReportDocument20 pagesFinal ReportMuhammad Hussain Bilal100% (1)
- International Journal of Information Technology, Control and Automation (IJITCA)Document18 pagesInternational Journal of Information Technology, Control and Automation (IJITCA)ijitcaNo ratings yet
- Dynamic Modeling and Analysis of The Rotor-StatorDocument17 pagesDynamic Modeling and Analysis of The Rotor-StatorMeerab AbbasNo ratings yet
- Crankshaft ModelDocument7 pagesCrankshaft Modeldeathjester1No ratings yet
- Design Methodology and Calculation of Tank Supports in A Heavy VehicleDocument9 pagesDesign Methodology and Calculation of Tank Supports in A Heavy VehicleAssef ZraouraNo ratings yet
- 39 MeisingerDocument11 pages39 MeisingerBaru SomisettyNo ratings yet
- FULLTEXT01Document9 pagesFULLTEXT01mwapedeborah741No ratings yet
- Modelling and Analysis of Automatic TransmissionDocument12 pagesModelling and Analysis of Automatic TransmissionmechnareshNo ratings yet
- Electronics 11 01856 v2Document14 pagesElectronics 11 01856 v2Manh Nguyen TienNo ratings yet
- Roll Angle Estimation in Two-Wheeled VehiclesDocument13 pagesRoll Angle Estimation in Two-Wheeled VehiclesTruong Van HoatNo ratings yet
- Kinematics of Four-Wheel-Steering Vehicles: Forschung Im Ingenieurwesen May 2001Document7 pagesKinematics of Four-Wheel-Steering Vehicles: Forschung Im Ingenieurwesen May 2001sherif aboelnourNo ratings yet
- 56 421Document10 pages56 421nguyendattdhNo ratings yet
- Calculating Optimum Gear Ratios of Mechanical Driven Systems Using Worm-Helical Gearbox and Chain DriveDocument8 pagesCalculating Optimum Gear Ratios of Mechanical Driven Systems Using Worm-Helical Gearbox and Chain DriveNguyen Van QuyenNo ratings yet
- Research Article: Teaching Planetary Gear Trains With The Aid of NomographsDocument9 pagesResearch Article: Teaching Planetary Gear Trains With The Aid of NomographsEduardo DelfinoNo ratings yet
- (3170203) Vehicle DynamicsDocument3 pages(3170203) Vehicle DynamicsNimesh HalaiNo ratings yet
- Simulation of Control System For A Half Car Model Suspension System For Passenger Car Application by Design An LQR ControllerDocument8 pagesSimulation of Control System For A Half Car Model Suspension System For Passenger Car Application by Design An LQR ControllerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- (Sici) 1097-0207 (19970130) 40 2 357 Aid-Nme71 3.0.co 2-pDocument25 pages(Sici) 1097-0207 (19970130) 40 2 357 Aid-Nme71 3.0.co 2-pYouTube GuyNo ratings yet
- Splines and SerrationsDocument6 pagesSplines and SerrationsMikel1020No ratings yet
- Rotor-Dynamics Analysis Process: Polar Moment of Inertia About The Axis of SpinDocument16 pagesRotor-Dynamics Analysis Process: Polar Moment of Inertia About The Axis of SpinpavanpppNo ratings yet
- 1063 Fullpaper 567961521540070Document7 pages1063 Fullpaper 567961521540070Rishikesh GunjalNo ratings yet
- MaziluPreda CONAT2016 Rackpinion SteeringDocument11 pagesMaziluPreda CONAT2016 Rackpinion SteeringJunaid QureshiNo ratings yet
- ART20179298Document13 pagesART20179298Đô LêNo ratings yet
- ICOME2010 Preda CarSuspensionOptimizationDocument8 pagesICOME2010 Preda CarSuspensionOptimizationSantiago UrgilesNo ratings yet
- Untaroiu2010 - Constrained Design Optimization of Rotor-Tilting Pad Bearing SystemDocument7 pagesUntaroiu2010 - Constrained Design Optimization of Rotor-Tilting Pad Bearing SystemheubmeNo ratings yet
- Suspension AnalysisDocument6 pagesSuspension AnalysisAnonymous 8plFyOLxNo ratings yet
- Design and Analysis of Rear Axle CasingDocument8 pagesDesign and Analysis of Rear Axle CasingMassive MindsNo ratings yet
- EUCOMES 027 GonzalezCruzDocument10 pagesEUCOMES 027 GonzalezCruzEduardo DelfinoNo ratings yet
- Gfilippini PDFDocument11 pagesGfilippini PDFdraggonboyNo ratings yet
- Verj FinalDocument19 pagesVerj FinalMohammed SalamNo ratings yet
- Saeedi J 2013Document14 pagesSaeedi J 2013Mohammed SalamNo ratings yet
- U3761MB-T ATMELCorporationDocument27 pagesU3761MB-T ATMELCorporationMohammed SalamNo ratings yet
- Ijertv6n5spl 01Document12 pagesIjertv6n5spl 01Mohammed SalamNo ratings yet
- Indonesian Journal of Science & Technology 6 (2) (2021) 427-440Document14 pagesIndonesian Journal of Science & Technology 6 (2) (2021) 427-440Mohammed SalamNo ratings yet
- Poincaré Astres AnalyseDocument14 pagesPoincaré Astres AnalyseSalam MohammedNo ratings yet
- JGSKDLFKJGDDocument8 pagesJGSKDLFKJGDMohammed SalamNo ratings yet
- Articles: BackgroundDocument11 pagesArticles: BackgroundMohammed SalamNo ratings yet
- Conquering College The Most Fun You Can Have Learning The Things You Need To Know NodrmDocument144 pagesConquering College The Most Fun You Can Have Learning The Things You Need To Know NodrmVithorNo ratings yet
- World Link YolaDocument3 pagesWorld Link YolaHamilton Obando100% (1)
- Analisa AgriculturalDocument6 pagesAnalisa AgriculturalFEBRINA SARLINDA, STNo ratings yet
- Cooling and Sealing Air System: Gas Turbine Training ManualDocument2 pagesCooling and Sealing Air System: Gas Turbine Training ManualVignesh SvNo ratings yet
- Malraux Anti-MemoiresDocument9 pagesMalraux Anti-MemoiresNevenaRistićNo ratings yet
- Delonghi Pinguino Water To Air Pac We125 Instruction Manual 715678Document21 pagesDelonghi Pinguino Water To Air Pac We125 Instruction Manual 715678Luis AlbertoAlmeidaSilva100% (1)
- 12 ĀnurũpyenaDocument7 pages12 ĀnurũpyenashuklahouseNo ratings yet
- NIELIT Recruitment For Scientist and Technical Assistants 2017 Official NotificationDocument6 pagesNIELIT Recruitment For Scientist and Technical Assistants 2017 Official NotificationKshitija100% (1)
- Week 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumDocument79 pagesWeek 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumAmir MustakimNo ratings yet
- Xgenus X-Ray PDFDocument61 pagesXgenus X-Ray PDFAli NuriNo ratings yet
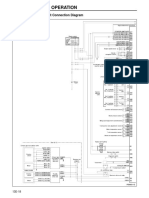
- Structure and Operation: 3. Electronic Control Unit Connection DiagramDocument16 pagesStructure and Operation: 3. Electronic Control Unit Connection DiagramAung Hlaing Min MyanmarNo ratings yet
- Beamforming For 4.9G/5G Networks: Exploiting Massive MIMO and Active Antenna TechnologiesDocument12 pagesBeamforming For 4.9G/5G Networks: Exploiting Massive MIMO and Active Antenna TechnologiesAymen Ben zinebNo ratings yet
- THE INDIAN NAVY - Artificer Apprentice & Senior Secondary Recruit PDFDocument3 pagesTHE INDIAN NAVY - Artificer Apprentice & Senior Secondary Recruit PDFUjjwalNo ratings yet
- FINAL ReportDocument48 pagesFINAL ReportMythri RangaswamyNo ratings yet
- Overleaf Keyboard ShortcutsDocument2 pagesOverleaf Keyboard ShortcutsAlberto GiudiciNo ratings yet
- Occupational Therapy Examination Review Guide 4th Edition Ebook PDFDocument57 pagesOccupational Therapy Examination Review Guide 4th Edition Ebook PDFrobert.campbell485No ratings yet
- Anaximenes of MiletusDocument4 pagesAnaximenes of MiletusRosel Gonzalo-AquinoNo ratings yet
- SOL-Logarithm, Surds and IndicesDocument12 pagesSOL-Logarithm, Surds and Indicesdevli falduNo ratings yet
- Evolution of Media INDUSTRIAL ERADocument16 pagesEvolution of Media INDUSTRIAL ERAAlec Ruht MasulaNo ratings yet
- Himachal Pradesh Staff Selection Commission Hamirpur - 177001Document2 pagesHimachal Pradesh Staff Selection Commission Hamirpur - 177001Verma JagdeepNo ratings yet
- Chapter 01 Fundamental and Derived QuantitiesDocument7 pagesChapter 01 Fundamental and Derived QuantitiesAlicia WilliamsNo ratings yet
- One Wavelength To Loop SkywireDocument2 pagesOne Wavelength To Loop SkywireRobert TurnerNo ratings yet
- Exposition Text Exercise ZenowskyDocument8 pagesExposition Text Exercise ZenowskyZenowsky Wira Efrata SianturiNo ratings yet
- Samsung Galaxy Watch 5 Pro User ManualDocument131 pagesSamsung Galaxy Watch 5 Pro User Manualzyron100% (1)
- Hamming Code - Error Detection Aim: AlgorithmDocument12 pagesHamming Code - Error Detection Aim: Algorithmkrithikgokul selvamNo ratings yet
- The Aerodynamics of ParachutesDocument78 pagesThe Aerodynamics of Parachutesstevehuppert50% (2)
- 07 Endodontic RetreatmentDocument64 pages07 Endodontic RetreatmentGayathriNo ratings yet
- PCBDocument5 pagesPCBarampandey100% (4)
- Assignment 4Document2 pagesAssignment 4Komal SinghNo ratings yet
- St. Louis College of Bulanao: Title/Topic Technical English I Introduction To Police Report WritingDocument41 pagesSt. Louis College of Bulanao: Title/Topic Technical English I Introduction To Police Report WritingNovelyn LumboyNo ratings yet
- Crossings: How Road Ecology Is Shaping the Future of Our PlanetFrom EverandCrossings: How Road Ecology Is Shaping the Future of Our PlanetRating: 4.5 out of 5 stars4.5/5 (10)
- The Great Bridge: The Epic Story of the Building of the Brooklyn BridgeFrom EverandThe Great Bridge: The Epic Story of the Building of the Brooklyn BridgeRating: 4.5 out of 5 stars4.5/5 (59)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo ratings yet
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (137)
- The Finite Element Method: Linear Static and Dynamic Finite Element AnalysisFrom EverandThe Finite Element Method: Linear Static and Dynamic Finite Element AnalysisRating: 5 out of 5 stars5/5 (3)
- Cable Supported Bridges: Concept and DesignFrom EverandCable Supported Bridges: Concept and DesignRating: 5 out of 5 stars5/5 (1)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansRating: 4.5 out of 5 stars4.5/5 (21)
- Rocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyFrom EverandRocks and Minerals of The World: Geology for Kids - Minerology and SedimentologyRating: 4.5 out of 5 stars4.5/5 (5)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Summary of Neil Postman's Amusing Ourselves to DeathFrom EverandSummary of Neil Postman's Amusing Ourselves to DeathRating: 4 out of 5 stars4/5 (2)
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- CAREC Road Safety Engineering Manual 3: Roadside Hazard ManagementFrom EverandCAREC Road Safety Engineering Manual 3: Roadside Hazard ManagementNo ratings yet
- Construction Innovation and Process ImprovementFrom EverandConstruction Innovation and Process ImprovementAkintola AkintoyeNo ratings yet
- Structural Cross Sections: Analysis and DesignFrom EverandStructural Cross Sections: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (19)
- Troubleshooting and Repair of Diesel EnginesFrom EverandTroubleshooting and Repair of Diesel EnginesRating: 1.5 out of 5 stars1.5/5 (2)
- Pile Design and Construction Rules of ThumbFrom EverandPile Design and Construction Rules of ThumbRating: 4.5 out of 5 stars4.5/5 (15)
- Skyway: The True Story of Tampa Bay's Signature Bridge and the Man Who Brought It DownFrom EverandSkyway: The True Story of Tampa Bay's Signature Bridge and the Man Who Brought It DownNo ratings yet
- Transportation Decision Making: Principles of Project Evaluation and ProgrammingFrom EverandTransportation Decision Making: Principles of Project Evaluation and ProgrammingNo ratings yet