You might also like
- Protect HV Shunt Reactors with Numerical RelaysDocument5 pagesProtect HV Shunt Reactors with Numerical Relaysalex696No ratings yet
- Problems in Quantum Mechanics: Third EditionFrom EverandProblems in Quantum Mechanics: Third EditionRating: 3 out of 5 stars3/5 (2)
- Tutorial 1Document3 pagesTutorial 1Putrevu SaiprakashNo ratings yet
- Elektrodynamik Series 6Document3 pagesElektrodynamik Series 6German ChiappeNo ratings yet
- Wigner Functions For The Landau Problem in Noncommutative SpacesDocument10 pagesWigner Functions For The Landau Problem in Noncommutative Spacesivan kikungaNo ratings yet
- Solving Poisson's Equation Using AMRDocument19 pagesSolving Poisson's Equation Using AMRDang Son TungNo ratings yet
- Take Home 7Document3 pagesTake Home 7Jaybert DumaranNo ratings yet
- ENGINEERING PHYSICS LECTURE 5 KEY CONCEPTSDocument38 pagesENGINEERING PHYSICS LECTURE 5 KEY CONCEPTSKamada Akshay VarmaNo ratings yet
- MIT 6.685 Electric Machines Class Notes on DC and Permanent Magnet MachinesDocument16 pagesMIT 6.685 Electric Machines Class Notes on DC and Permanent Magnet MachinesJboar TbenecdiNo ratings yet
- Unit 4: Electric and Magnetic Fields: F Q Q R E Q R E V D V Q RDocument1 pageUnit 4: Electric and Magnetic Fields: F Q Q R E Q R E V D V Q Rlloyd ShawNo ratings yet
- SC 4Document6 pagesSC 4jspammail2306No ratings yet
- Distance Elements Linking Theory With TestingDocument20 pagesDistance Elements Linking Theory With TestingAbraham TorresNo ratings yet
- EM OscillationsDocument6 pagesEM OscillationsHamin GilNo ratings yet
- 1990.04.15 - Vanderbilt - PRB - Soft Self-Consistent PseudopotentialsDocument4 pages1990.04.15 - Vanderbilt - PRB - Soft Self-Consistent PseudopotentialsAlejandra AwimbaweNo ratings yet
- Jefimenko's Wedge CircuitDocument9 pagesJefimenko's Wedge CircuitPat Tab3No ratings yet
- Eigenvalue Estimates For The Resolvent of A Non-Normal MatrixDocument25 pagesEigenvalue Estimates For The Resolvent of A Non-Normal MatrixAbdullah KhanNo ratings yet
- CF7001 ElectrostaticDocument113 pagesCF7001 ElectrostaticMatheus FagundesNo ratings yet
- Chapter 6Document16 pagesChapter 6api-3696297100% (1)
- Silicon Diode CharacteristicsDocument8 pagesSilicon Diode CharacteristicsRamadan DawNo ratings yet
- Electric FieldDocument12 pagesElectric FieldAnonymous O7SZExpJVxNo ratings yet
- Circuit 7Document5 pagesCircuit 7richy launcherNo ratings yet
- beasley1979Document9 pagesbeasley1979Rafik Et-TrabelsiNo ratings yet
- Lab4 F15 Si DiodeDocument15 pagesLab4 F15 Si DiodeJohn MarkNo ratings yet
- Unit 1 Summary SlidesDocument17 pagesUnit 1 Summary SlidesayuuuNo ratings yet
- Periodic Boundary ConditionDocument13 pagesPeriodic Boundary Conditionayush1612No ratings yet
- 2208 02218Document23 pages2208 02218SergioGimenoNo ratings yet
- Lab Iv. Silicon Diode Characteristics: 1. ObjectiveDocument9 pagesLab Iv. Silicon Diode Characteristics: 1. ObjectiveRaja MariyappanNo ratings yet
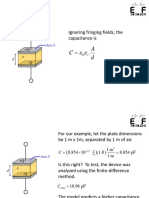
- Capacitor ModelingDocument15 pagesCapacitor ModelingBill WhiteNo ratings yet
- Lab4 F12Document8 pagesLab4 F12Anser PashaNo ratings yet
- Unit 7-2Document6 pagesUnit 7-2Miguel TeránNo ratings yet
- Archimedean Spiral Antenna Simulation and TestingDocument51 pagesArchimedean Spiral Antenna Simulation and Testingravi010582No ratings yet
- 01 TutorialDocument3 pages01 Tutorialee23m052No ratings yet
- Analytical Solutions of Eddy-Current Problems in A Finite Length CylinderDocument11 pagesAnalytical Solutions of Eddy-Current Problems in A Finite Length Cylinderriccardo tarelliNo ratings yet
- Massachusetts Institute of Technology: 1.1 GeometryDocument17 pagesMassachusetts Institute of Technology: 1.1 GeometryJack SoNo ratings yet
- A High Voltage Programmable Ramp Generator: Articles You May Be Interested inDocument6 pagesA High Voltage Programmable Ramp Generator: Articles You May Be Interested inali esmaeelniaNo ratings yet
- Notes 1Document30 pagesNotes 1Antal TóthNo ratings yet
- Microwave Network Theory and Passive DevicesDocument17 pagesMicrowave Network Theory and Passive DevicesalishaNo ratings yet
- Transformers and Rectifier Analysis in Power ElectronicsDocument9 pagesTransformers and Rectifier Analysis in Power ElectronicsMehmet DALNo ratings yet
- Ferroresonance CalculationDocument8 pagesFerroresonance Calculationwildtrek0% (1)
- Theoretical Chemistry ProblemsDocument65 pagesTheoretical Chemistry Problemstun lykoungNo ratings yet
- Kichael Carley Acoustics-40-43Document4 pagesKichael Carley Acoustics-40-43eki7777No ratings yet
- Lecture 1Document31 pagesLecture 1Aziz RofiuddarojadNo ratings yet
- MA225 - DifferentiationDocument14 pagesMA225 - DifferentiationRebecca RumseyNo ratings yet
- AP10009 Chap26Document29 pagesAP10009 Chap26白卡持有人No ratings yet
- Mandeep Singh CFD ReportDocument30 pagesMandeep Singh CFD ReportAnonymous UoHUagNo ratings yet
- Module - Ii Vector Differential Calculus - ContinuedDocument12 pagesModule - Ii Vector Differential Calculus - ContinuedharishNo ratings yet
- Numerical Method Algorithms for Solution of 2D Laplace Equation in ElectrostaticsDocument5 pagesNumerical Method Algorithms for Solution of 2D Laplace Equation in ElectrostaticsHassan AbdelmoamenNo ratings yet
- Linear Circuit Analysis: Chapter # 2: Basic LawsDocument60 pagesLinear Circuit Analysis: Chapter # 2: Basic Lawsrizwanspirit11No ratings yet
- Atomic Structure and Spectra: Selection RulesDocument51 pagesAtomic Structure and Spectra: Selection RulesAdministracion OTIC IVICNo ratings yet
- Pauli-Villars' Regularization of Ghosts in Path-Integral String FormulationDocument10 pagesPauli-Villars' Regularization of Ghosts in Path-Integral String FormulationGökhan AlkaçNo ratings yet
- GGHFDocument31 pagesGGHFRohit RajNo ratings yet
- IES CONV Electrical Engineering 2000Document9 pagesIES CONV Electrical Engineering 2000jitenNo ratings yet
- Alexander CH 02 Final R1Document16 pagesAlexander CH 02 Final R1utpNo ratings yet
- Chapter 2Document59 pagesChapter 2Saksopheaktra PhoNo ratings yet
- Microelectromechanical Systems Assignment HelpDocument11 pagesMicroelectromechanical Systems Assignment HelpMechanical Engineering Assignment HelpNo ratings yet
- Circuit Analysis Using The Node and Mesh MethodsDocument20 pagesCircuit Analysis Using The Node and Mesh MethodsjyothiNo ratings yet
- Transformador y Autotransformador Monofásico: Abstract: in This Practice Make Different Configurations To SeeDocument3 pagesTransformador y Autotransformador Monofásico: Abstract: in This Practice Make Different Configurations To SeeJosé LuisNo ratings yet
- Circuit Analysis Using The Node and Mesh MethodsDocument20 pagesCircuit Analysis Using The Node and Mesh MethodsjyothiNo ratings yet
- PTSP Notes Unit 3 PDFDocument11 pagesPTSP Notes Unit 3 PDFG S ArunNo ratings yet
- Mnlayer: High-Performance Layered Elastic Analysis ProgramDocument13 pagesMnlayer: High-Performance Layered Elastic Analysis Programnegar khakshurNo ratings yet
- Math 231 SyllabusDocument4 pagesMath 231 SyllabusM ReyNo ratings yet
- June 2017 QPDocument52 pagesJune 2017 QPEyad UsamaNo ratings yet
- SPM 2010 Paper 2Document3 pagesSPM 2010 Paper 2kysimNo ratings yet
- An Introduction To Fractional CalculusDocument29 pagesAn Introduction To Fractional CalculusFredrik Joachim GjestlandNo ratings yet
- Holistic Numerical MethodsDocument6 pagesHolistic Numerical MethodsOhol Rohan BhaskarNo ratings yet
- Benders Decomposition for Fixed Charge Transportation Problem Using GAMSDocument8 pagesBenders Decomposition for Fixed Charge Transportation Problem Using GAMSIbrahim Ishaq KishimiNo ratings yet
- Mechanics of Materials II Columns by Dr. Riaz Muhammad Riaz@ceocs - Edu.pkDocument74 pagesMechanics of Materials II Columns by Dr. Riaz Muhammad Riaz@ceocs - Edu.pkM Kafeel KhanNo ratings yet
- Maths - Chapter 1 - Option 2 PDFDocument12 pagesMaths - Chapter 1 - Option 2 PDFabhay8705No ratings yet
- TUGAS 3 Optimum Design Problem FormulationDocument8 pagesTUGAS 3 Optimum Design Problem FormulationMasUmsidaNo ratings yet
- Journal of Physics A Mathematical and General 2002 Vol. 35 (14) p3245Document20 pagesJournal of Physics A Mathematical and General 2002 Vol. 35 (14) p3245Héctor F BonillaNo ratings yet
- Whatsnew Terrytao PDFDocument270 pagesWhatsnew Terrytao PDFMihica KhareNo ratings yet
- Markov Chains: Scott SheffieldDocument18 pagesMarkov Chains: Scott SheffieldzahiruddinNo ratings yet
- Dummit and Foote Chapter 0 SolutionsDocument8 pagesDummit and Foote Chapter 0 SolutionsIon Mikel Onandia MartinezNo ratings yet
- Test 23Document12 pagesTest 23Aryan GuptaNo ratings yet
- CH 03Document31 pagesCH 03TríNo ratings yet
- Mapping Course Outcomes Program Outcomes Engineering MathDocument2 pagesMapping Course Outcomes Program Outcomes Engineering MathRakibul islam RakibNo ratings yet
- CH 4Document123 pagesCH 4Loc Nguyen100% (3)
- Schur InequalityDocument4 pagesSchur Inequalitymoka0687No ratings yet
- FALL 2010-11: by Assoc. Prof. Sami FethiDocument54 pagesFALL 2010-11: by Assoc. Prof. Sami FethialisagiNo ratings yet
- Maximum and minimum trigonometric functionsDocument2 pagesMaximum and minimum trigonometric functionsDeepakNo ratings yet
- Numerical Methods in Engineering With Matlab 3rd Edition PDFDocument41 pagesNumerical Methods in Engineering With Matlab 3rd Edition PDFvickie.neal389100% (34)
- Random Questions Reviewer Sequences Arithmetic GeometricDocument2 pagesRandom Questions Reviewer Sequences Arithmetic GeometricJerry Bhoy ReniedoNo ratings yet
- Laplace TransformDocument122 pagesLaplace TransformbalavceNo ratings yet
- Product MetricsDocument15 pagesProduct MetricsHimanshu Aggarwal100% (1)
- Sol hmw3Document5 pagesSol hmw3Martín FigueroaNo ratings yet
- DSP Lecture NotesDocument24 pagesDSP Lecture Notesvinothvin86No ratings yet
- Zeno Contours, Parametric Forms & IntegralsDocument11 pagesZeno Contours, Parametric Forms & IntegralsJohn GillNo ratings yet
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- The Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceFrom EverandThe Physics of God: How the Deepest Theories of Science Explain Religion and How the Deepest Truths of Religion Explain ScienceRating: 4.5 out of 5 stars4.5/5 (23)
- The Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismFrom EverandThe Tao of Physics: An Exploration of the Parallels between Modern Physics and Eastern MysticismRating: 4 out of 5 stars4/5 (500)
- Quantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessFrom EverandQuantum Spirituality: Science, Gnostic Mysticism, and Connecting with Source ConsciousnessRating: 4 out of 5 stars4/5 (6)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)
- Lost in Math: How Beauty Leads Physics AstrayFrom EverandLost in Math: How Beauty Leads Physics AstrayRating: 4.5 out of 5 stars4.5/5 (125)
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- Black Holes: The Key to Understanding the UniverseFrom EverandBlack Holes: The Key to Understanding the UniverseRating: 4.5 out of 5 stars4.5/5 (13)
- Quantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishFrom EverandQuantum Physics for Beginners Who Flunked Math And Science: Quantum Mechanics And Physics Made Easy Guide In Plain Simple EnglishRating: 4.5 out of 5 stars4.5/5 (18)
- The Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeFrom EverandThe Magick of Physics: Uncovering the Fantastical Phenomena in Everyday LifeNo ratings yet
- Quantum Physics: What Everyone Needs to KnowFrom EverandQuantum Physics: What Everyone Needs to KnowRating: 4.5 out of 5 stars4.5/5 (48)
- The Holographic Universe: The Revolutionary Theory of RealityFrom EverandThe Holographic Universe: The Revolutionary Theory of RealityRating: 4.5 out of 5 stars4.5/5 (76)
- The Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldFrom EverandThe Power of Eight: Harnessing the Miraculous Energies of a Small Group to Heal Others, Your Life, and the WorldRating: 4.5 out of 5 stars4.5/5 (54)
- Bedeviled: A Shadow History of Demons in ScienceFrom EverandBedeviled: A Shadow History of Demons in ScienceRating: 5 out of 5 stars5/5 (5)
- In Search of Schrödinger’s Cat: Quantum Physics and RealityFrom EverandIn Search of Schrödinger’s Cat: Quantum Physics and RealityRating: 4 out of 5 stars4/5 (380)
- The End of Everything: (Astrophysically Speaking)From EverandThe End of Everything: (Astrophysically Speaking)Rating: 4.5 out of 5 stars4.5/5 (155)
- Midnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterFrom EverandMidnight in Chernobyl: The Story of the World's Greatest Nuclear DisasterRating: 4.5 out of 5 stars4.5/5 (409)