Professional Documents
Culture Documents
Applications of Some Semiactive Control Systems To Benchmark Cable-Stayed Bridge
Uploaded by
سجاد الفOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Applications of Some Semiactive Control Systems To Benchmark Cable-Stayed Bridge
Uploaded by
سجاد الفCopyright:
Available Formats
Applications of Some Semiactive Control Systems
to Benchmark Cable-Stayed Bridge
A. K. Agrawal1; J. N. Yang2; and W. L. He3
Abstract: Recently, a benchmark cable-stayed bridge model was developed for the control community as a test bed to evaluate the
performance of various strategies for the control of cable-stayed bridges during earthquakes. In this paper, the effectiveness and perfor-
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
mances of some semiactive and passive control systems for this benchmark cable-stayed bridge are evaluated and presented. The
semiactive control systems considered include the semiactive stiffness damper and the semiactive friction damper. Cases of passive linear
and nonlinear viscous fluid dampers are also investigated and presented. The performances of semiactive control systems are evaluated
using effective control strategies and compared with that of the sample active control system using actuators. Simulation results clearly
indicate that the displacement of the bridge deck as well as the shear and moment at the base of the towers can be reduced substantially
by installing these passive and semiactive protective devices. It is shown that semiactive and passive devices investigated herein are
effective in reducing the peak response quantities of the bridge to a level comparable to that of the sample active controller under similar
force constraints.
DOI: 10.1061/共ASCE兲0733-9445共2003兲129:7共884兲
CE Database subject headings: Active control; Bridges, cable-stayed; Control systems; Benchmarks; Passive control; Earthquakes.
Introduction used. The traditional approach is to compromise between the dis-
placement of the deck, and shear forces and moments at the base
The construction of cable-stayed bridges has become popular of the towers.
worldwide because of their elegant shapes and economical con- Alternative to the traditional approach is the use of energy
struction. However, due to its flexibility, the bridge response may dissipation devices, active, or semiactive control systems between
be excessive when subject to dynamical loads. Hence, the reduc- the bridge deck and towers. Passive energy dissipation devices
tion of the dynamic response quantities of cable-stayed bridges can be designed effectively for a specified ground motion but they
induced by environmental and service dynamic loads is of vital are less effective for ground motions with different characteris-
importance for their safety and serviceability. The type of connec- tics. Advantages of active or semiactive control systems include
tion between the bridge deck and tower is one of the most impor- the ability to adapt to different loading conditions, and to control
tant factors that affect the response of cable-stayed bridges. Gen- different vibration modes of the structure. A review of passive,
erally, shock transmission devices are used as the connection active, semiactive and hybrid control systems can be found, e.g.,
between the tower and the deck. These devices are installed in the in Housner et al. 共1997兲 and Spencer and Sain 共1997兲.
longitudinal direction to allow for expansion of the deck due to In this paper, applications of the semiactive stiffness damper
temperature changes. Under dynamic loads, these devices are ex- 共SASD兲 and the semiactive friction damper 共SAFD兲, as well as
tremely stiff and are assumed to behave as rigid links. A rigid linear and nonlinear passive viscous fluid dampers have been in-
connection between the tower and the deck will reduce the dis- vestigated for the reduction of earthquake induced vibrations of
placement of the deck. However, such connection will transmit the benchmark cable-stayed bridge recently developed by Dyke
the inertia force of superstructure to the base of the tower during et al. 共2000, 2003兲. Cable-stayed bridges exhibit complex behav-
seismic excitation, thus increasing the base shear and moment of ior in which the translational and torsional modes are often
towers. On the other hand, the displacement of the deck will be strongly coupled. The bridge model developed by Dyke et al.
excessive if weak connections between the deck and towers are 共2000, 2003兲 is quite extensive and it is based on an actual cable-
stayed bridge that is under construction in Cape Girardeau,
1
Associate Professor, Dept. of Civil Engineering, City College of New Missouri.
York, New York, NY 10031. E-mail: anil@ce.ccny.cuny.edu
2
Professor, Dept. of Civil and Environmental Engineering, Univ. of Semiactive and Passive Control Devices ÕAlgorithms
California, Irvine, CA 92697. E-mail: jnyang@uci.edu
3
Graduate Student Researcher, Dept. of Civil Engineering, City Col-
lege of New York, New York, NY 10031. E-mail: anil@ce.ccny.cuny.edu Semiactive Stiffness Damper
Note. Associated Editor: Billie F. Spencer Jr. Discussion open until The semiactive stiffness damper 共SASD兲 consists of a cylinder-
December 1, 2003. Separate discussions must be submitted for individual
piston system with an on-off valve in the bypass pipe connecting
papers. To extend the closing date by one month, a written request must
be filed with the ASCE Managing Editor. The manuscript for this paper two sides of the cylinder filled with hydraulic oil as shown in Fig.
was submitted for review and possible publication on November 6, 2001; 1. Conventionally, such a cylinder-piston system is used as a vari-
approved on January 27, 2003. This paper is part of the Journal of able damping device by replacing the on-off valve by an orifice
Structural Engineering, Vol. 129, No. 7, July 1, 2003. ©ASCE, ISSN valve. The variable damping effect is achieved by controlling the
0733-9445/2003/7-884 – 894/$18.00. size of the orifice. The device in Fig. 1 with an on-off valve can
884 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng. 2003.129:884-894.
Several control laws for the RSASD have been proposed re-
cently 共e.g., Yang et al. 1999a,b, 2000a,b兲; Bobrow et al. 2000;
Yang and Agrawal 2000; Jabbari and Bobrow 2002兲. Consider a
Lyapunov function V
V⫽0.5Y T KY ⫹0.5Ẏ T M Ẏ ⫹␥Y T M Ẏ (3)
in which Y ⫽n vector with the ith element y i being the relative
displacement of ith degree-of-freedom with respect to the ground;
M and K⫽mass and stiffness matrices of the structure; and
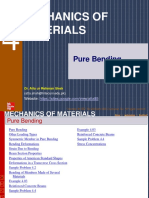
Fig. 1. Schematic diagram of the semiactive stiffness damper ␥⫽constant so that V⬎0 to preserve the property of Lyapunov
共SASD兲 function V. The system is stable when V̇⬍0. Differentiating Eq.
共3兲 to obtain V̇, using the equation of motion, and minimizing V̇,
be connected with a bracing system. When the valve is closed, the one obtains 共Yang et al. 1999b, 2000b兲 a resetting control law as:
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
damper 共cylinder and bracings兲 serves as a stiffness element with reset the SASD unit when ḋ i ⫹␥d i ⫽0, i.e.
an effective stiffness k e , which is provided by the bulk modulus
of the fluid in the cylinder and the bracing system in series 共Yang d si ⫽d i when ḋ i ⫹␥d i ⫽0 (4)
et al. 2000a,b兲. When the valve is open, the piston is free to move For a special case in which ␥⫽0, Eq. 共4兲 becomes d si ⫽d i when
and the hydraulic oil of the damper provides only a very small ḋ i ⫽0. Such a special control law can be obtained based on the
damping due to a leakage and head loss in bypass pipe. The principle that resetting is made when the energy stored in the
semiactive stiffness damper can be operated either in the resetting SASD unit is maximum 共Bobrow et al. 2000兲, and it will be used
mode or switching mode. In the resetting mode, the on-off valve in this study.
is pulsed to open and then closed quickly at appropriate time The performance of the RSASD in protecting buildings has
instants. In the switching mode, the valve is open for a certain been investigated by Yang et al. 共1999a,b, 2000a,b兲; Agrawal and
finite time interval and closed during another time interval. Both He 共2000兲; Yang and Agrawal 共2002兲; Agrawal and Yang
the resetting and the switching control laws are described in the 共2000a,b兲. Their results have clearly shown that the RSASD is
following. quite effective in protecting the integrity of buildings subject to
all kinds of earthquakes. A preliminary investigation on the effec-
Resetting Mode tiveness of the RSASD for the benchmark cable-stayed bridge
was conducted in He et al. 共2001兲. Experimental test of small-
During the operation in the resetting mode, the valve is always scale semiactive stiffness damper had been conducted by Jabbari
closed, and hence the energy is stored in the hydraulic damper and Bobrow 共2002兲. This paper further investigates the effective-
共hydraulic cylinder and bracing兲 in the form of potential energy. ness of the RSASD for the benchmark cable-stayed bridge.
At appropriate time instants, the valve is pulsed to open and close
quickly so that the pressure difference across the cylinder is elimi-
nated. This operation is referred to as the resetting and the device Switching Mode
is called resetting semiactive stiffness damper 共RSASD兲. At the An active variable stiffness 共AVS兲 system proposed by Kobori
moment of resetting, the piston is at the position d s , referred to as and Kamagata 共1992兲 consists of bracings with an effective stiff-
the resetting position, and the energy stored in the entire damper ness k e and a computer controlled locking device. When the lock-
is released. Hence, by regulating the resetting at appropriate time ing device is on, the stiffness k e of the bracing is added to the
instants, the structural response can be reduced by drawing ener- building. When the locking device is off, bracing is disconnected
gies from vibrating structure. from the story unit and no stiffness is added. Such an AVS system
A resetting semiactive stiffness damper 共RSASD兲 can be in- has been installed in a three-story building in Tokyo 共Nasu et al.
stalled between the pier and deck. The control force u(t) from the 2001兲. The control force u i (t) from the ith AVS unit installed in
RSASD can be expressed as the bridge can be expressed as
u 共 t 兲 ⫽k e 共 d⫺d s 兲 (1)
u i 共 t 兲 ⫽ v共 t 兲 k ei d i 共 t 兲 (5)
where k e ⫽effective stiffness of the damper; d⫽relative displace-
in which v (t)⫽1 when the device is locked, and v (t)⫽0 when
ment between the deck and pier; and d s ⫽piston position of the
the device is unlocked. A control law was presented by Kamagata
RSASD at the previous instance of resetting. At the moment of
and Kobori 共1994兲 as follows:
resetting 共the valve is pulsed to open and close兲, one has d s ⫽d
and the force from the RSASD is zero. One can design a RSASD
with an appropriate effective stiffness and a certain range of
stroke for practical applications. In the RSASD, velocity and dis-
v共 t 兲 ⫽ 再 1
0
if d i ḋ i ⭓0
otherwise
(6)
placement sensors are needed and they can be integrated into the Such a control law has also been derived using the method of
device itself. sliding mode control 共Yang et al. 1996兲.
For the ith RSASD damper installed at the ith location of the The AVS system above can be implemented using the semi-
bridge, the control force is given by active stiffness damper 共SASD兲 presented in Fig. 1 operating in
the switching mode 共Yang et al. 2000b兲. In the switching mode
u i 共 t 兲 ⫽k ei 共 d i ⫺d si 兲 (2)
operation, the valve is closed for a certain period of time and it is
where k ei ⫽effective stiffness of the ith damper; d i ⫽relative dis- open for another period of time, referred to the switching semi-
placement between the deck and tower where the ith damper is active stiffness damper 共SSASD兲. Again, the control force from
installed; and d si ⫽previous resetting piston position of the ith the ith SSASD is given by Eq. 共2兲. The control law to open and
damper. close the valve is given by
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 885
J. Struct. Eng. 2003.129:884-894.
and the electric current in these solenoids is regulated such that an
electromagnetic attractive force exists between the two solenoids.
Hence, the normal force N(t) between the steel plates is directly
proportional to the square of the current in solenoids. Such a
damper can be installed in a cable-stayed bridge by connecting
one plate to the deck and the other plate to the pier.
For the ith friction damper installed between the deck and pier,
the friction force is given by
u i 共 t 兲 ⫽N i 共 t 兲 sgn共 ḋ i 兲 if ḋ i ⫽0
(8)
⫺N i 共 t 兲 ⭐u i 共 t 兲 ⭐N i 共 t 兲 if ḋ i ⫽0
Fig. 2. Schematic drawing of electromagnetic semiactive friction in which N i (t)⫽normal force across the ith damper. The com-
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
damper plete state of the friction force can be described by a combination
of stick-slip phases in Eq. 共8兲. During the sticking phase, the two
plates are stuck together, i.e., ḋ i ⫽0, in which no energy is dissi-
close the valve when d i ⫽0 pated. For an efficient dissipation of the vibration energy, it is
(7)
desirable to design semiactive friction dampers that can slide con-
open the valve when ḋ i ⫽0 tinuously to dissipate energy without sticking.
The implementation of SSASD using the control law in Eq. 共7兲 is For all semiactive friction damper, including the semiactive
identical to the implementation of AVS based on the control law electromagnetic friction damper proposed by Agrawal and Yang
given by Eq. 共6兲. The reason is explained as follows. Suppose the 共2000a,b兲 in Fig. 2, Eq. 共8兲 holds except that the normal force
valve of the SSASD is open at t 1 共i.e., ḋ i ⫽0 at t 1 ) and it remains N i (t) is regulated by a control algorithm. It is mentioned that the
open until t 2 when it is closed. Note that d si is the piston position effectiveness and performance of the semiactive friction damper
when the valve is closed. During the period (t 1 ,t 2 ) in which the depend essentially on the particular control algorithm used. He
valve is open, the control force u i (t) is zero, and it follows from et al. 共2003兲 proposed an efficient control algorithm that is ca-
Eq. 共2兲 that d i ⫽d si . At the time instant t 2 when the valve pable of 共1兲 producing a rectangular hysteresis loop, 共2兲 maintain-
changes from open to close, it follows from the switching control ing the friction damper in the sliding phase as much as possible,
law in Eq. 共7兲 that d i ⫽d si ⫽0 and hence the control force is and 共3兲 eliminating the chattering effect. Such a control algo-
u i (t)⫽k e d i with d si ⫽0 for the entire time interval when the rithm, referred to as the linear boundary layer semiactive friction
共LBLSAF兲 controller, is given by
再
valve is closed. Following such reasoning, it can be shown easily
that the SSASD system using the control law in Eq. 共7兲 is iden-  兩 P 关 d i 共 t 兲兴 兩 sgn共 ḋ i 兲 if 兩 ḋ i 兩 ⬎␦ i
tical to the AVS system using the control law in Eq. 共6兲. In this
paper, the SSASD system with the control law in Eq. 共7兲 will be u i共 t 兲 ⫽  兩 P 关 d i 共 t 兲兴 兩兩 ḋ i 兩 (9)
sgn共 ḋ i 兲 if 兩 ḋ i 兩 ⭐␦ i
used for applications to the benchmark cable-stayed bridge. ␦
in which ⫽controller gain; ␦ i ⫽boundary layer parameter to
Semiactive Friction Damper avoid chattering around ḋ i ⬵0; and P 关 d i (t) 兴 ⫽magnitude of the
A typical passive friction damper consists of two steel plates that previous local peak drift before the time t, given by
are slot-bolted together and is installed in the structure as a brac- P 关 d i 共 t 兲兴 ⫽d i 共 t⫺s 兲 where s⫽ 兵 min t̄⭓0:ḋ i 共 t⫺t̄ 兲 ⫽0 其
ing element. During an earthquake event, sliding takes place be- (10)
tween the plates when the dynamic force 共slip force兲 is greater
than the friction force between the plates. The friction force in The idea to utilize the previous peak drift in Eq. 共9兲 was origi-
such devices depends on the normal force applied by the bolts. In nally proposed by Inaudi 共1997兲 to produce a constant friction
practical applications, passive friction dampers are designed to force in half a cycle of oscillation, and it has been modified by He
slide when the earthquake magnitude exceeds a threshold level et al. 共2003兲 in Eq. 共9兲. The implementation of the control algo-
and they act as stiffness elements 共sticking phase兲 for smaller rithm in Eqs. 共9兲 and 共10兲 requires only the measurements of local
earthquakes. Since energy is dissipated through sliding, the effi- drift and velocity across the damper, i.e., two sensors are re-
ciency of friction dampers can be improved by guaranteeing con- quired. Hence, the control system is completely decentralized.
tinuous slippage in the damper through a continuous regulation of Such a control algorithm will be used in this paper to investigate
normal force across the damper for all levels of excitations. The the performance of semiactive friction damper, because it is the
normal force can be applied and regulated by hydraulic mecha- most effective control algorithm available to date.
nism 共e.g., Fujita et al. 1994; Inaudi 1997; etc.兲, piezoelectric
mechanism 共Chen and Chen 2001兲 or electromagnetic regulation Passive Viscous Fluid Dampers
共e.g., Agrawal and Yang 2000a,b; He et al. 2003; Yang and
Agrawal 2002兲. The semiactive electromagnetic friction damper To compare the performance of various control systems, passive
recently proposed by Agrawal and Yang 共2000a,b兲 consists of a viscous fluid dampers are also considered in this study. The force
friction pad sandwiched between two steel plates as shown in Fig. from the ith passive viscous damper installed between the deck
2. These three layers are slot-bolted together so that sliding takes and pier is given by
place between the steel plates and the friction pad. The friction u i 共 t 兲 ⫽c ␣ 兩 ḋ i 兩 ␣ sgn共 ḋ i 兲 (11)
force between steel plates and the friction pad depends on the
coefficient of friction 共兲 and the normal force N(t). Two insu- where ḋ i ⫽velocity across the damper and c ␣ ⫽experimentally de-
lated solenoids are installed on the outer surfaces of steel plates termined damping coefficient with the units of force per velocity
886 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng. 2003.129:884-894.
Fig. 3. Drawing of Cape Girardeau bridge 共Dyke et al. 2000, 2003兲
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
raised to the ␣ power, ␣ is a real positive exponent with typical The stiffness matrices of the linearized evaluation model of the
values in the range of 0.35–1 for seismic applications. Eq. 共11兲 benchmark cable-stayed bridge are determined through a nonlin-
becomes u i (t)⫽c 1 ḋ i for ␣⫽1, which represents a linear viscous ear static analysis corresponding to the deformed state of the
damper, and u i (t)⫽c 0 sgn(ḋi) for ␣⫽0, which represents a pure bridge with dead load. If lock-up devices are used between the
friction damper. deck and towers, the first ten frequencies of the evaluation model
Linear viscous dampers are very effective in reducing the seis- are 0.2899, 0.3699, 0.4683, 0.5158, 0.5812, 0.6490, 0.6687,
mic demands on the structure. However, they may develop exces- 0.6970, 0.7102, and 0.7203 Hz, which is used as a basis of com-
sive forces when large structural velocities occur for long period parison for various controlled systems. If no connection or control
structures subject to near-fault ground motions. Nonlinear viscous devices are employed between the deck and towers, the model is
dampers have become popular recently because of their nonlinear referred to as the uncontrolled case. The first ten frequencies for
force-velocity relationships and their ability to limit the peak the uncontrolled case are 0.1618, 0.2666, 0.3723, 0.4545, 0.5015,
damper forces at large structural velocities while providing suffi- 0.5650, 0.6187, 0.6486, 0.6965, and 0.7094 Hz, respectively. De-
cient supplemental damping. Both linear 共with ␣⫽1.0) and non- tailed information about the cable-stayed bridge, including its
linear viscous dampers 共with ␣⫽0.35) will be used in this study. modeling and the FEM package, can be found in Dyke et al.
In practical applications, these dampers can provide forces in ex- 共2003兲.
cess of 8,000 KN. Because the bridge is assumed to attach to the bedrock, the
effect of soil-structure interaction has been neglected. One-
dimensional ground acceleration is assumed to apply longitudi-
Benchmark Cable-Stayed Bridge nally and acts simultaneously at all supports. The following three
earthquake records have been prescribed for the numerical simu-
The benchmark model developed by Dyke et al. 共2003兲 is based lations of the bridge response: 共i兲 El Centro north-south 共NS兲
on the Missouri 74-Ilinois 146 cable-stayed bridge spanning the 共1940兲; 共2兲 Mexico City 共1985兲; and 共3兲 Gebze NS 共1999兲. The
Mississippi River near Cape Girardeau, Missouri, and a schematic Mexico City earthquake is selected because the Cape Girardeau
drawing of the bridge is shown in Fig. 3. The proximity of the region is geologically similar to the Mexico City. The El Centro
bridge site to the New Madrid seismic zone makes the protection and Gebze earthquakes are used to test the performance of differ-
of the bridge from seismic excitation of interest. ent control strategies for earthquakes with different characteris-
tics.
To evaluate the effectiveness of various control systems and
algorithms, evaluation criteria J 1 to J 18 have been presented
共Dyke et al. 2003兲. The first six evaluation criteria J 1 to J 6 are
related to the peak responses, where J 1 ⫽the peak base shear of
towers, J 2 ⫽the peak shear force of towers at the deck level,
J 3 ⫽the peak overturning moment at the bases of towers, J 4 ⫽the
peak moment of towers at the deck level, J 5 ⫽the peak deviation
in cable tension, and J 6 ⫽the peak displacement of the deck at the
abutment. These criteria are normalized by the corresponding re-
sponse quantities of the bridge with rigid links between the deck
and towers. Since the bridge has two towers, all the peak response
Fig. 4. Response spectra 共3% damping ratio兲 of El Centro, Mexico
and Gebze earthquake Fig. 5. Locations of protective devices in cable-stayed bridge
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 887
J. Struct. Eng. 2003.129:884-894.
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
Fig. 6. Reduction factors for evaluation criteria for cable-stayed bridge equipped with various semiactive and passive devices and subject to El
Centro earthquake. 共Reduction factor for J i ⫽J i with damper devices/J i without rigid links between deck and towers.兲
Fig. 7. Reduction factors for evaluation criteria for cable-stayed bridge equipped with various semiactive and passive devices and subject to
Mexico City earthquake. 共Reduction factor for evaluation criteria, J i ⫽J i with damper devices/J i without rigid links between deck and towers.兲
888 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng. 2003.129:884-894.
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
Fig. 8. Reduction factor for evaluation criteria for cable-stayed bridge equipped with various semiactive and passive devices and subject to
Gebze earthquake. 共Reduction factor for J i ⫽J i with damper devices/J i without rigid links between deck and towers.兲
quantities elated to the tower are normalized by the maximum of Numerical Simulations
the peak response quantities of the two towers.
The evaluation criteria J 7 to J 11 represent the norm of bridge
Response Spectra of Ground Motions
response quantities, where J 7 ⫽the norm of the base shear of tow-
ers, J 8 ⫽the norm of shear force to towers at the deck level, The peak accelerations of the aforementioned three earthquakes
J 9 ⫽the norm of the overturning moment at the bases of towers, are 3.4170, 1.4068, and 2.5978 m/s2 , respectively. The response
J 10⫽the norm of the moment of towers at the deck level, and spectra of a single-degree-of-freedom 共SDOF兲 structure with 3%
J 11⫽the norm of the deviation in cable tension. The norm 储.储 of a damping ratio 共same as the damping ratio of the FEM model of
response quantity is defined as the cable-stayed bridge兲 subject to these three earthquakes are
储.储⬅ 冑冕 1
t
tf
0
关 . 兴 2 dt (12)
shown in Fig. 4. It is observed from Fig. 4 that 共1兲 the El Centro
earthquake has a longer duration and a predominant period of
approximately 0.95 s, 共2兲 the Gebze record is a typical near-fault
where t f is sufficiently large to allow the response of the structure ground motion with a short duration and a long predominant pe-
to attenuate, and 关.兴 is the quantity whose norm is to be calculated. riod of approximately 4.2 s, and 共3兲 the Mexico City record is a
Evaluation criteria J 7 to J 11 are calculated by normalizing the typical long duration ground motion on soft soil with a predomi-
norm of the response quantities by the corresponding norm of the nant period of 2.1 s. The geological condition of the Cape Gi-
bridge with rigid links between deck and towers. Since there are rardeau region is similar to that of the Mexico City region.
two towers, normed response quantities related to towers are nor- In the sample control problem by Dyke et al. 共2003兲, actuators
malized by the maximum of the norm of the response quantities are installed at eight locations as shown in Fig. 5. Four actuators
for two towers. Further, J 12⫽the maximum force from a single are installed at each location between the girder and two piers
damper normalized by the bridge weight W, J 13⫽the maximum symmetrically 共a total of four locations兲, and two actuators are
stroke of the damper normalized by the maximum displacement installed at each location between the girder and abutment at two
of the deck, J 16⫽the total number of dampers used, and J 17⫽the edges of the bridge 共a total number of four locations兲. The number
total number of sensors required. Criteria J 14 and J 15 relate to the of actuators installed at each of the eight locations is indicated in
peak power and total power required by damper devices and are Fig. 5 by parentheses. The distribution of the passive or semi-
not used in this research, since experimentally, verified models of active dampers is identical to that of the sample actuators in order
semiactive systems being investigated are not available. to facilitate a valid comparison for the performance of each con-
Finally, since the bridge is subject to three different earth- trol system. Since all semiactive controllers considered in this
quakes, the maximum of each evaluation criteria of the three paper use the local velocity and displacement across the dampers,
earthquakes are presented for the performance comparison, i.e., sensors are required at these eight locations. Hence, all semiactive
max controllers considered are completely decentralized and they can
El Centro operate independently in the event of failure of other controllers.
J i ⫽ Mexico City兵 J i 其 , i⫽1 to 17 (13) The peak displacement of the deck J 6 of the uncontrolled
Gebze bridge 共no connection and control devices between the deck and
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 889
J. Struct. Eng. 2003.129:884-894.
Table 1. Evaluation criteria Using El Centro Earthquake
Resetting Semiactive
Linear Nonlinear semiactive Switching friction damper
viscous viscous stiffness damper semiactive ⫽3,500
Sample C⫽1,600 C ␣ ⫽900 K e ⫽1,500 stiffness damper Stiffness of linear
Criterion Uncontrolleda active KN s/m KN 共m/s) ⫺0.35 KN/m K e ⫽2,000 KN/m spring⫽2,000 KN/m
J 1 共peak base shear兲 0.4560 0.386 0.387 0.358 0.440 0.449 0.409
J 2 共peak deck shear of towers兲 1.3665 1.090 1.140 1.020 1.290 1.320 1.260
J 3 共peak base moment 0.3878 0.295 0.312 0.278 0.366 0.383 0.343
of towers兲
J 4 共peak deck moment 0.9675 0.587 0.498 0.463 0.607 0.570 0.593
of towers兲
J 5 共peak cable dev.兲
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
0.2448 0.192 0.204 0.197 0.238 0.250 0.221
J 6 共peak deck disp.兲 3.7162 1.220 1.030 0.812 1.540 1.540 1.520
J 7 共normed base shear兲 0.2696 0.225 0.215 0.489 0.246 0.247 0.235
J 8 共normed shear of towers 2.0071 1.120 0.954 3.170 1.290 1.300 1.190
at deck level兲
J 9 共normed base moment 0.6364 0.274 0.224 0.217 0.285 0.302 0.261
of towers兲
J 10 共normed deck moment 2.7793 0.867 0.717 0.611 0.940 1.010 0.833
of towers兲
J 11 共normed deviation in 0.0421 0.028 0.023 0.019 0.028 0.031 0.026
cable tension兲
J 12aW 共peak control force兲 760 857 790 282 298 513
SP 296
J 13 共peak damper stroke兲 2.4399 0.800 0.678 0.533 1.010 1.010 0.995
J 16 共number of control devices兲 0 24 24 24 24 24 24
J 17 共number of sensors兲 0 5 0 0 8 16 16
a
All evaluation criteria are normalized with respect to corresponding response quantities of the bridge with rigid links between the deck and towers.
Evaluation criteria for control devices at a different control force level than shown above can be obtained by multiplying uncontrolled evaluation criteria
in Column 2 with reduction factor for evaluation criteria at the particular force level for a control device in Fig. 6.
towers in longitudinal direction兲 for the El Centro, Mexico City 共9兲 is used with a friction coefficient ⫽0.2 and a boundary layer
and Gebze earthquakes are 36.26, 18.41, and 77.34 cm, respec- parameter of ␦ i ⫽0.1. Then, the value of the control gain  i is
tively. The peak displacements of a SDOF structure with a natural varied to achieve different levels of the peak control force. Fur-
period of T⫽6.18 s 共the first natural period of the uncontrolled ther, a linear spring with a stiffness of 2,000 KN/m is installed in
bridge兲 subject to these three earthquakes 共as shown in Fig. 5兲 are parallel to the SAFD to restrict the displacement of the bridge
37, 20, and 82 cm, respectively. These results indicate that the deck, since the friction damper alone provides little stiffness to
response of the bridge is governed by the first mode of vibration reduce the bridge deck displacement. For RSASD and SSASD
during these earthquakes. dampers, different values of the effective stiffness k e are used to
The evaluation criteria J 1 through J 13 as a function of the peak obtain different levels of the peak control forces.
control force of each damper for linear viscous dampers, nonlin- It is observed from Figs. 6– 8 that the nonlinear viscous
ear viscous damper, RSASD, SSASD, and SAFD systems are damper has the best performance among passive and semiactive
presented for the three ground motions in Figs. 6– 8. It is men- control devices considered, when the peak control force is less
tioned again that, for all the passive and semiactive control sys- than a certain value. For the El Centro and Gebze earthquakes, the
tems considered above, a total of 24 dampers are installed and normed shears of towers at the base (J 7 ) and at the deck level
their distribution is shown in the parentheses of Fig. 5, which is (J 8 ) increase when the peak control force is greater than 250 KN.
identical to that of the sample problem using actuators 共Dyke Such a force limit is 100 kN for the Mexico earthquake for the
et al. 2003兲. The abscissa in Figs. 6– 8 denotes the maximum evaluation criteria J 1 , J 7 , and J 8 , and it is 200 KN for all other
peak control force for a single damper 共a total of 24 dampers兲. evaluation criteria. Hence, the installation of nonlinear viscous
The ordinate of graphs shown in Figs. 6– 8 are reduction factor dampers with capacities higher than the force limit will cause
for particular evaluation criteria. For example, ordinate J 1 in Fig. undesirable results. This may be due to the fact that the control
6 is the peak base shear of the bridge towers with damper devices force of nonlinear viscous dampers reaches the peak capacity
normalized by the peak base shear of the uncontrolled 共without whenever the velocity is greater than a certain value. It is ob-
rigid links between deck and towers兲 bridge. Hence, response served that the performances of the RSASD and SAFD and
quantities with values less than 1 indicate response reduction be- sample active controller are similar for these three earthquakes for
cause of the damper devices. The construction of Figs. 6– 8 is most of the response quantities. The linear viscous damper has a
described in the following. better performance during the Mexico earthquake, which is a long
For linear (␣⫽1) and nonlinear (␣⫽0.35) viscous damper, duration ground motion. The performance of switching the semi-
the response factors in Figs. 6– 8 are obtained by varying the active stiffness damper 共SSASD兲 is inferior to that of the resetting
damping coefficient C ␣ to achieve different level of maximum semiactive stiffness damper 共RSASD兲 for all earthquakes. The
peak control forces. For the SAFD system, the controller in Eq. semiactive friction damper has a better performance than other
890 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng. 2003.129:884-894.
Table 2. Evaluation criteria Using Mexico City Ground Motion
Semiactive
Linear Nonlinear Resetting semiactive Switching friction damper
viscous viscous stiffness damper semiactive ⫽3,500
Sample C⫽1,600 C ␣ ⫽900 K e ⫽1,500 stiffness damper Stiffness of linear
Criterion Uncontrolleda active KN s/m KN 共m/s) ⫺0.35 KN/m K e ⫽2,000 KN/m spring⫽2,000 KN/m
J 1 共peak base shear兲 0.556 0.454 0.424 0.731 0.487 0.502 0.462
J 2 共peak deck shear of towers兲 1.860 1.340 1.140 2.040 1.500 1.530 1.420
J 3 共peak base moment 0.876 0.582 0.497 0.459 0.637 0.702 0.607
of towers兲
J 4 共peak deck moment 0.220 0.622 0.528 0.552 0.685 0.713 0.638
of towers兲
J 5 共peak cable dev.兲
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
0.090 0.073 0.065 0.058 0.085 0.086 0.082
J 6 共peak deck disp.兲 7.570 2.300 2.340 1.660 3.400 2.850 2.950
J 7 共normed base shear兲 0.445 0.397 0.364 1.680 0.412 0.404 0.394
J 8 共normed shear of towers 1.980 1.150 0.987 7.710 1.320 1.320 1.250
at deck level兲
J 9 共normed base moment 0.933 0.434 0.363 0.427 0.467 0.483 0.449
of towers兲
J 10 共normed deck moment 3.170 1.080 0.994 0.956 1.290 1.300 1.190
of towers兲
J 11 共normed deviation in 0.016 0.010 0.009 0.008 0.011 0.011 0.010
cable tension兲
J 12aW 共peak control force兲 292 325 808 208 138 251
SP: 144
J 13 共peak damper stroke兲 3.810 1.160 1.180 0.835 1.710 1.440 1.490
J 16 共number of control devices兲 0 24 24 24 24 24 24
J 17 共number of sensors兲 0 5 0 0 8 16 16
a
All evaluation criteria are normalized with respect to corresponding response quantities of the bridge with rigid links between the deck and the towers.
Evaluation criteria for control devices at a different control force level than shown above can be obtained by multiplying uncontrolled evaluation criteria
in Column 2 with reduction factor for evaluation criteria at the particular force level for a control device in Fig. 7.
control devices during the Gebze earthquake, since friction damp- control law was shown to be very effective 共Yang et al. 2000b兲.
ers are quite effective for near-fault earthquakes. The effective stiffness of RSASD is chosen to be k e ⫽1,500
A purpose of the benchmark problem 共Dyke et al. 2003兲 is to KN/m so that the peak control force does not exceed the limit of
compare the performance of various control devices and strate- 1,000 KN. For the SSASD with the control law in Eq. 共7兲, the
gies. For this purpose, the constraints on the device capabilities, effective stiffness k e ⫽2,000 KN/m is chosen so that the peak
including the peak control force and strokes, should be identical. control force does not exceed the limit. For the semiactive friction
In this study, the total number of dampers 共24 dampers兲 and their dampers 共SAFD兲, the control law in Eq. 共9兲, that has been dem-
installation locations for all passive and semiactive devices con- onstrated to be the most effective 共He et al. 2003兲, is used with a
sidered above are identical to the active system in the sample boundary layer parameter ␦ i ⫽0.1 and the friction coefficient
benchmark problem. As in the sample benchmark problem in ⫽0.2. Again, the peak control force increases as the control gain
which each actuator has a peak control force of 1,000 KN, we  i increases, and  i ⫽17,500 is chosen so that the peak control
also impose the same constraints on the peak control force for all force does not exceed the limit. Likewise, a linear spring with a
dampers, i.e., 1,000 kN. Evaluation criteria J 1 to J 13 and J 16 to
spring constant k⫽2,000 KN/m is installed in parallel with each
J 17 for all the passive and semiactive control systems considered
SAFD to provide the stiffness for the damper.
are presented in Tables 1–3 for El Centro, Mexico and Gebze
It is observed from Tables 1– 4 that the nonlinear viscous
earthquakes, respectively. The maximum of the evaluation criteria
damper is quite effective for the El Centro and Gebze earthquakes
for these three earthquakes are presented in Table 4. Also shown
in the third column of Tables 1– 4 are the evaluation criteria for for most of the evaluation criteria except the normed base shear
active control systems 共actuators兲 given in Dyke et al. 共2003兲. (J 7 ) and the normed shear of towers at the deck level (J 8 ). The
The performance of each control system presented in Tables overall performance of the nonlinear viscous damper is inferior to
1– 4 depends on the design of the device as well as the control that of other control systems since the nonlinear viscous damper
algorithm and control parameters used. For linear viscous damp- with C ␣ ⫽900 KN (m/s) ⫺0.35 results in large values of peak and
ers, we choose C ␣ ⫽1,600 KN s/m with ␣⫽1.0, and for nonlinear normed shear forces at the base of towers and at the deck level.
viscous dampers, we choose C ␣ ⫽900 KN 共m/s兲⫺0.35 with ␣ Hence, nonlinear viscous dampers can be designed to achieve a
⫽0.35. The only criterion used for choosing the damping coeffi- better performance for a particular individual earthquake. How-
cient C ␣ above is that the maximum control force for the three ever, they may have relatively poor performance for ground mo-
earthquakes does not exceed the limit of 1,000 KN. Note that the tions with different characteristics. On the other hand, linear vis-
maximum control force increases as the damping coefficient C ␣ cous dampers are very effective for all the three earthquakes,
increases. For the resetting semiactive stiffness dampers especially for the long duration ground motion during the Mexico
共RSASD兲, the control law in Eq. 共3兲 is used with ␥⫽0. This City earthquake.
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 891
J. Struct. Eng. 2003.129:884-894.
Table 3. Evaluation Criteria Using El Centro Earthquake
Semiactive
Linear Nonlinear Resetting semiactive Switching friction damper
viscous viscous stiffness damper semiactive stiffness ⫽3,500
Sample C⫽1,600 C ␣ ⫽900 K e ⫽1,500 damper Stiffness of linear
Criterion Uncontrolleda active KN s/m KN 共m/s) ⫺0.35 KN/m K e ⫽2,000 KN/m spring⫽2,000 KN/m
J 1 共peak base shear兲 0.405 0.458 0.429 0.451 0.438 0.424 0.434
J 2 共peak deck shear of towers兲 2.330 1.280 1.030 1.210 1.340 1.720 1.050
J 3 共peak base moment 0.864 0.452 0.346 0.351 0.539 0.684 0.379
of towers兲
J 4 共peak deck moment 3.800 1.230 1.220 0.907 1.470 2.140 1.300
of towers兲
J 5 共peak cable dev.兲
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
0.325 0.136 0.154 0.151 0.177 0.224 0.155
J 6 共peak deck disp.兲 10.800 3.610 3.370 2.280 4.410 6.260 3.380
J 7 共normed base shear兲 0.447 0.322 0.285 0.952 0.322 0.337 0.308
J 8 共normed shear of towers 4.830 1.370 1.360 6.290 1.670 1.880 1.370
at deck level兲
J 9 共normed base moment 1.820 0.456 0.429 0.399 0.525 0.661 0.410
of towers兲
J 10 共normed deck moment 8.730 1.440 1.720 1.350 2.000 2.620 1.440
of towers兲
J 11 共normed deviation in 0.051 0.016 0.015 0.012 0.018 0.023 0.013
cable tension兲
J 12aW 共peak control force兲 862 835 790 877 900 852
SP: 487
J 13 共peak damper stroke兲 5.900 1.980 1.850 1.250 2.420 2.430 1.860
J 16 共number of control devices兲 0 24 24 24 24 24 24
J 17 共number of sensors兲 0 5 0 0 8 16 16
a
All evaluation criteria are normalized with respect to corresponding response quantities of the bridge with rigid links between the deck and the towers.
Evaluation criteria for control devices at a different control force level than shown above can be obtained by multiplying uncontrolled evaluation criteria
in Column 2 with reduction factor for evaluation criteria at the particular force level for a control device in Fig. 8.
Table 4. Evaluation Criteria for Three Earthquakes
Semiactive
Linear Nonlinear Resetting semiactive Switching friction damper
viscous viscous stiffness damper semiactive ⫽3,500 Stiffness
Sample C⫽1,600 C ␣ ⫽900 K e ⫽1,500 stiffness damper of linear
Criterion Uncontrolled active KN s/m KN 共m/s) ⫺0.35 KN/m K e ⫽2,000 KN/m spring⫽2,000 KN/m
J 1 共peak base shear兲 0.556 0.458 0.429 0.731 0.487 0.502 0.462
J 2 共peak deck shear of towers兲 2.330 1.340 1.140 2.040 1.500 1.720 1.420
J 3 共peak base moment 0.876 0.582 0.497 0.459 0.637 0.702 0.607
of towers兲
J 4 共peak deck moment 3.800 1.230 1.220 0.907 1.470 2.140 1.300
of towers兲
J 5 共peak cable dev.兲 0.325 0.192 0.204 0.197 0.238 0.250 0.221
J 6 共peak deck disp.兲 10.800 3.610 3.370 2.280 4.410 6.260 3.380
J 7 共normed base shear兲 0.447 0.397 0.364 1.680 0.412 0.404 0.394
J 8 共normed shear of towers 4.830 1.370 1.360 7.710 1.670 1.880 1.370
at deck level兲
J 9 共normed base moment 1.820 0.456 0.429 0.427 0.525 0.661 0.449
of towers兲
J 10 共normed deck moment 8.730 1.440 1.720 1.350 2.000 2.620 1.440
of towers兲
J 11 共normed deviation in 0.051 0.028 0.023 0.019 0.028 0.031 0.026
cable tension兲
J 12W 共peak control force兲 0.000 862 857 808 877 900 852
SP: 487
J 13 共peak damper stroke兲 5.900 1.980 1.850 1.250 2.420 3.430 1.860
J 16 共number of control devices兲 0 24 24 24 24 24 24
J 17 共number of sensors兲 0 5 0 0 8 16 16
892 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng. 2003.129:884-894.
The overall performance of semiactive friction dampers in par- Acknowledgment
allel with linear springs 共SAFD⫹LS兲 is similar to that of the
sample active control system. In particular, its performance is This research is supported through the National Science Founda-
superior to that of the sample active controller for the Gebze tion Grant No. CMS 0099895 and partially supported through the
earthquake, which is a typical near-fault short duration ground National Science Foundation Grant No. CMS 02-18813.
motion with a long-period pulse. The performance of the switch-
ing semiactive stiffness damper 共SSASD兲 is inferior to that of the
resetting semiactive stiffness damper 共RSASD兲 for all the three References
earthquakes. This is due to the difference in the energy dissipation
Agrawal, A. K., and He, W. L. 共2000兲. ‘‘Semi-active control of seismi-
characteristic 共Yang et al. 2000b兲. Based on worst case of three
cally excited benchmark building using a resetting semi-active stiff-
earthquakes, it is observed from Table 4 that the overall perfor- ness damper.’’ Proc., 2nd European Conf. on Structural Control, Eu-
mance of the RSASD device is slightly inferior to that of the ropean Association for the Control of Structures, Champs-sur-Marne,
sample active controller. However, the performance of the France, July 3– 6, 2000.
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
RSASD is quite comparable to that of the sample active controller Agrawal, A. K., and Yang, J. N. 共1999a兲. ‘‘Design of passive energy
for the El Centro earthquake, in which only 282 KN peak force is dissipation systems based on LQR methods.’’ J. Intell. Mater. Syst.
required by the RSASD as compared to the 760 KN peak force Struct., 10共12兲, 933–944.
required by the sample active controller. The force required by the Agrawal, A. K., and Yang, J. N. 共1996b兲. ‘‘Optimal placement of passive
RSASD device can be provided completely through the selection dampers on buildings using combinatorial optimization.’’ J. Intell.
of the damper hardware. The power required to operate the valve Mater. Syst. Struct., 10共12兲, 997–1014.
Agrawal, A. K., and Yang, J. N. 共2000a兲. ‘‘Semi-active control strategies
of the damper may be much less than that required by other
for buildings subject to near-field earthquakes.’’ Proc. SPIE, Smart
semiactive devices, e.g., semiactive friction dampers, etc. Al- Structures and Materials 2000: Smart Systems for Bridges, Structures,
though it is assumed that the valve can be reset instantaneously, and Highways, March 6 – 8, Newport Beach, Calif., 3988, 359–370.
valves in actual implementations may require resetting time up to Agrawal, A. K., and Yang, J. N. 共2000b兲. ‘‘A semi-active hybrid isolation
20 ms. This resetting time will not affect adversely the perfor- system for buildings subject to near-field earthquakes.’’ Advanced
mance of long-period flexible structures, e.g., the cable-stayed Technology in Structural Engineering 共CD-ROM兲, 8 pages, ASCE,
bridges. A detailed study on the design and experimental demon- Proc. ASCE 2000 Structures Congress and Exposition, May 8 –10,
stration of the full-size RSASD, taking into account the dynamics Philadelphia.
of resetting, is being carried out. Bobrow, J. E., Jabbari, F., and Thai, K. 共2000兲. ‘‘A new approach to shock
isolation and vibration suppression using a resettable actuator.’’ J.
Dyn. Syst., Meas., Control, 122, 570–573.
Chen, C. C., and Chen, G. D. 共2001兲. ‘‘A high efficiency control logic for
Conclusions semi-active friction dampers.’’ Proc., 2001 Structures Congress, May
21–23, Washington, D.C., 共CD-ROM兲, 11 pages.
Recently, a benchmark problem for the seismic response control Dyke, S. J., Bergman, L. A., Turan, G., and Caicedo, J. M. 共2000兲.
of cable-stayed bridges has been proposed. In the benchmark ‘‘Benchmark control problem for seismic response of cable-stayed
bridge model, different control systems can be installed between bridges.’’ Proc., 3rd Int. Workshop on Structure Control, Paris, July
the deck girder and towers or abutments to reduce the dynamic 7–10.
Dyke, S. J., Bergma., L. A., Turan, G. and Caicedo, J. M. 共2003兲,
response of the bridge subject to various earthquakes. In this
‘‘Benchmark control problem for seismic response control of cable-
paper, the performances of semiactive control systems, including stayed bridges.’’ J. Struct. Eng., 129共7兲, 857– 872.
the resetting semiactive stiffness damper 共RSASD兲, the switching Fujita, T., et al. 共1994兲. ‘‘Semiactive seismic isolation using controllable
semiactive stiffness damper 共SSASD兲, and the semiactive friction friction damper.’’ Bull. Earthquake Res. Inst., Univ. Tokyo, 27共2兲, 21–
damper 共SAFD兲 in combination with linear springs, as well as 31.
linear and nonlinear passive viscous dampers have been investi- Gluck, N., Reinhorn, A. M., Gluck, J., and Levy, R. 共1996兲. ‘‘Design of
gated. Numerical results demonstrate that the magnitude of the supplemental dampers for control of structures.’’ J. Struct. Eng.,
displacement of the bridge deck and those of the shear and mo- 122共12兲, 1394 –1399.
ment at the base of the towers can be reduced simultaneously He, W.-L., Agrawal, A. K., and Mahmoud, K. 共2001兲. ‘‘Control of seis-
using the semiactive and passive devices investigated herein. mically excited cable-stayed bridge using resetting semi-active stiff-
ness dampers.’’ J. Bridge Eng., 6共6兲, 376 –384.
Based on three earthquakes with different dynamic characteris-
He, W.-L., Agrawal, A. K., and Yang, J. N. 共2003兲. ‘‘A novel semi-active
tics, the overall performances of passive viscous dampers and
friction controller for linear structures against earthquakes.’’ J. Struct.
semiactive friction dampers in combination with linear springs in Eng., 129共7兲, 941–950.
parallel 共SAFD⫹LS兲 are comparable to that of the sample active Housner, G. W., Bergman, L. A., Caughey, T. K., Chassiakos, A. G., et al.
control system, whereas the overall performance of the resetting 共1997兲. ‘‘Structural control: Past, present, and future.’’ J. Eng. Mech.,
semiactive stiffness dampers 共RSASD兲 is slightly worse. 123共9兲, 897–971.
For simplicity of comparing the performances of various con- Inaudi, J. A. 共1997兲. ‘‘Modulated homogeneous friction: A semi-active
trol systems, the configurations of all control devices have been damping strategy.’’ Earthquake Eng. Struct. Dyn., 26, 361–376.
specified, i.e., 24 dampers distributed at eight locations, and the Jabbari, F., and Bobrow, J. E. 共2002兲. ‘‘Vibration suppression with reset-
peak control force of each damper is limited to 1,000 KN, incon- table device.’’ J. Eng. Mech., 128共9兲, 916 –924.
sistent with that of the active sample controller by Dyke et al. Kobori, T., and Kamagata, S. 共1992兲. ‘‘Active variable stiffness system—
Active seismic response control.’’ Proc., U.S.-Italy-Japan Workshop/
共2000, 2003兲. Hence, little room is available for the optimal de-
Symposium on Structural Control and Intelligent Systems, July 13-15,
sign of various control systems. In fact, each control system can Sorrento, Italy, July 17, Genoa, Italy, 140–153.
be optimized with respect to some objective functions to achieve Kamagata, S., and Kobori, T. 共1994兲. ‘‘Autonomous adaptive control of
the best performance 共e.g., Gluck et al. 1996; Agrawal and Yang active variable stiffness systems for seismic ground motion.’’ Proc.,
1999a,b; Yang et al. 2002兲. This subject is, however, beyond the 1st World Conf. on Structural Control, 2, TA4-23, Pasadena, Calif.,
scope of the present paper. USC Publication, Los Angeles.
JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003 / 893
J. Struct. Eng. 2003.129:884-894.
Nasu, T., Kobori, T., Takahashi, M., Niwa, N., and Ogasawara, K. 共2001兲. Yang, J. N., Agrawal, A. K., and Kim, J. H. 共1999a兲. ‘‘A semi-active
‘‘Active variable stiffness system with non-resonant control.’’ Earth- stiffness damper for vibration control of civil engineering structures.’’
quake Eng. Struct. Dyn., 30共11兲, 1597–1614. Proc., 17th Int. Modal Analysis Conf. 共IMAC XVII兲, Society for
Spencer, B. F., Jr., and Sain, M. K. 共1997兲. ‘‘Controlling buildings: A new Experimental Mechanics, Kissimmee, Fla., Feb. 8 –11, 437– 443.
frontier in feedback.’’ IEEE Control Syst. Mag., 17共6兲, 19–35. Yang, J. N., Kim, J. H., and Agrawal, A. K. 共1999b兲. ‘‘Seismic response
Yang, J. N., and Agrawal, A. K. 共2000兲. ‘‘Protective system technology control using semi-active stiffness dampers.’’ Proc., Int. Workshop on
for building structures against near-field earthquakes.’’ Proc., Int. Seismic Isolation, Energy Dissipation and Control of Structures, Seis-
Workshop on Annual Commemoration of Chi-chi Earthquake, Vol. mological Press, Guangzhou, China, 312–319.
II—Technology Aspect, National Center for Research on Earthquake Yang, J. N., Kim, J.-H., and Agrawal, A. K. 共2000b兲. ‘‘A resetting semi-
Engineering, Taipei, Taiwan, 76 – 87.
active stiffness damper for seismic response control.’’ J. Struct. Eng.,
Yang, J. N., and Agrawal, A. K. 共2002兲. ‘‘Semi-active hybrid control
126共12兲, 1427–1433.
systems for nonlinear buildings against near-field earthquakes.’’ Eng.
Yang, J. N., Lin, S., Kim, J. H., and Agrawal, A. K. 共2002兲. ‘‘Optimal
Struct., 24, 271–280.
Yang, J. N., Agrawal, A. K., and He, W. 共2000a兲. ‘‘Response control of design of passive energy dissipation systems based on H⬁ and H2
performances.’’ Earthquake Eng. Struct. Dyn., 31共4兲, 921–936.
Downloaded from ascelibrary.org by Michigan State University on 01/04/15. Copyright ASCE. For personal use only; all rights reserved.
nonlinear structures using a semi-active stiffness damper.’’ Advances
in Structural Dynamics, Vol. I, 349–356, Elsevier Science Ltd., Proc., Yang, J. N., Wu, J. C., and Li, Z. 共1996兲. ‘‘Control of seismic-excited
Int. Conf. on Advances in Structural Dynamics, Dec. 13–25, Hong buildings using active variable stiffness systems.’’ J. Eng. Struct.,
Kong. 18共8兲, 589–596.
894 / JOURNAL OF STRUCTURAL ENGINEERING © ASCE / JULY 2003
J. Struct. Eng. 2003.129:884-894.
You might also like
- Adeli 1997 - Smart - Struct13 - PontesDocument9 pagesAdeli 1997 - Smart - Struct13 - PontesGabriela BianchinNo ratings yet
- Earthquake Response Control of Isolated Bridges Using Supplementary Passive DampersDocument15 pagesEarthquake Response Control of Isolated Bridges Using Supplementary Passive DampersDhirendra Kumar PandeyNo ratings yet
- Ahmad Et Al - 2018 - Generalized Approach For The Formulation of Analytical Model of Hybrid CableDocument13 pagesAhmad Et Al - 2018 - Generalized Approach For The Formulation of Analytical Model of Hybrid CablezhangenqiNo ratings yet
- Evans (1984) - Simplified Analysis For Cellular StructuresDocument13 pagesEvans (1984) - Simplified Analysis For Cellular StructuresGogyNo ratings yet
- N A RCB S C L: Onlinear Nalysis of EAM Ubject To Yclic Oading by Hyo-Gyoung Kwak and Sun-Pil KimDocument9 pagesN A RCB S C L: Onlinear Nalysis of EAM Ubject To Yclic Oading by Hyo-Gyoung Kwak and Sun-Pil KimSaul Max Huayta AguilarNo ratings yet
- Investigations of Large-Scale Voltage-Dependent Loads For Damping Inter-Area Oscillations Mechanism and Robust Decentralized ControlDocument12 pagesInvestigations of Large-Scale Voltage-Dependent Loads For Damping Inter-Area Oscillations Mechanism and Robust Decentralized Controlrohit kumarNo ratings yet
- 1 s2.0 S2352012422004398 MainDocument15 pages1 s2.0 S2352012422004398 MainGonzalo NavarroNo ratings yet
- Journal of Earthquake Engineering: To Cite This Article: CHIA-MING CHANG & CHIN-HSIUNG LOHDocument29 pagesJournal of Earthquake Engineering: To Cite This Article: CHIA-MING CHANG & CHIN-HSIUNG LOHTanjil MominNo ratings yet
- Tpwrs 2021 3049324Document11 pagesTpwrs 2021 3049324Mahdee NafisNo ratings yet
- Swing Story - Lateral Force Resisting System Connected With Dampers: Novel Seismic Vibration Control System For Building StructuresDocument12 pagesSwing Story - Lateral Force Resisting System Connected With Dampers: Novel Seismic Vibration Control System For Building StructuresNiamul IslamNo ratings yet
- Synchronised Heavy Lifting System For Bridge Structures: Project Manager (Structures), Roadtek Asset ServicesDocument9 pagesSynchronised Heavy Lifting System For Bridge Structures: Project Manager (Structures), Roadtek Asset ServicesKrushna RamaNo ratings yet
- Variable shunt reactors optimize power grid stabilityDocument4 pagesVariable shunt reactors optimize power grid stabilitysasenthil241464No ratings yet
- Structural Behavior of RC Beam-Column Subassemblages Under A Middle Column Removal ScenarioDocument18 pagesStructural Behavior of RC Beam-Column Subassemblages Under A Middle Column Removal ScenarioMarimuthu KaliyamoorthyNo ratings yet
- Lei Et Al 2023 An Advanced Approach To Determining The Spanwise Coherence of The Buffeting Forces On Bridge Decks WithDocument10 pagesLei Et Al 2023 An Advanced Approach To Determining The Spanwise Coherence of The Buffeting Forces On Bridge Decks WithTONY VILCHEZ YARIHUAMANNo ratings yet
- Method To Compute Live-Load Distribution in Bridge GirdersDocument8 pagesMethod To Compute Live-Load Distribution in Bridge GirdersfmNo ratings yet
- Passive and Hybrid Control Systems For Seismic Protection of A Benchmark Cable-Stayed BridgeDocument26 pagesPassive and Hybrid Control Systems For Seismic Protection of A Benchmark Cable-Stayed BridgeflyobamaNo ratings yet
- OTC 2881 The Dynamic Behavior of Mooring Lines: Van Sluijs and Blok, Netherlands Ship Model BasinDocument8 pagesOTC 2881 The Dynamic Behavior of Mooring Lines: Van Sluijs and Blok, Netherlands Ship Model BasinSoledad AceitunoNo ratings yet
- Fundamental Mode Estimation For Modern Cable-Stayed Bridges Considering The Tower FlexibilityDocument12 pagesFundamental Mode Estimation For Modern Cable-Stayed Bridges Considering The Tower FlexibilityJhonny Bernal LlampaNo ratings yet
- Quasi-Static Testing of Posttensioned Nonemulative Column-Footing Connections For Bridge PiersDocument13 pagesQuasi-Static Testing of Posttensioned Nonemulative Column-Footing Connections For Bridge PiersAnonymous I8dXeoNo ratings yet
- Real-Time Dynamic Substructuring Testing of A Bridge Equipped With Friction-Based Seismic IsolatorsDocument11 pagesReal-Time Dynamic Substructuring Testing of A Bridge Equipped With Friction-Based Seismic IsolatorsshivamomshantiNo ratings yet
- Lateral Isolation System of A Long-Span Cable-Stayed Bridge With Heavyweight Concrete Girder in A High Seismic RegionDocument15 pagesLateral Isolation System of A Long-Span Cable-Stayed Bridge With Heavyweight Concrete Girder in A High Seismic RegionshivamomshantiNo ratings yet
- Roebling Suspension Bridge. I: Finite-Element Model and Free Vibration ResponseDocument9 pagesRoebling Suspension Bridge. I: Finite-Element Model and Free Vibration ResponseRakshit SelotNo ratings yet
- (Asce) Hy 1943-7900 0002028Document10 pages(Asce) Hy 1943-7900 0002028morteza imaniNo ratings yet
- Eliminating Deck Joints Using Debonded Link Slabs PDFDocument11 pagesEliminating Deck Joints Using Debonded Link Slabs PDFAhmed AjmalNo ratings yet
- Optimum Cable-Force Adjustments in Concrete Cable-Stayed Bridges by A. Kasuga, Member, ASCE, H. Arai, J. E. Breen, Fellow, ASCE, and K. FurukawaDocument10 pagesOptimum Cable-Force Adjustments in Concrete Cable-Stayed Bridges by A. Kasuga, Member, ASCE, H. Arai, J. E. Breen, Fellow, ASCE, and K. Furukawapkrn100% (1)
- Compliant Actuator DesignsDocument14 pagesCompliant Actuator DesignsHeeralNo ratings yet
- IEEE Article Validates Quantized Control for Quadrotor Attitude TrackingDocument10 pagesIEEE Article Validates Quantized Control for Quadrotor Attitude TrackingMou KhalilNo ratings yet
- Estimation of Damping Ratio of Cable-Stayed Bridges For Seismic Design by Kazuhiko Kawashima, T Shigeki Unjoh, 2 and Meguru Tunomoto 3Document17 pagesEstimation of Damping Ratio of Cable-Stayed Bridges For Seismic Design by Kazuhiko Kawashima, T Shigeki Unjoh, 2 and Meguru Tunomoto 3じゅんこ塩原No ratings yet
- Distributed Strain Measurements For Culvert AssessmentDocument12 pagesDistributed Strain Measurements For Culvert AssessmentMario PerezNo ratings yet
- Mooring With Multicomponent Cable Systems: K. A. AnsariDocument8 pagesMooring With Multicomponent Cable Systems: K. A. AnsariSoledad AceitunoNo ratings yet
- Trabajo Clase1 MantenimientoDocument7 pagesTrabajo Clase1 MantenimientoAdriana Oleas GranizoNo ratings yet
- Disconnecting Circuit Breaker - One Device, Two OptionsDocument2 pagesDisconnecting Circuit Breaker - One Device, Two Optionslac1981No ratings yet
- A Case Study On The Application of Passive Control and Seismic Isolation Techniques To Cable-Stayed Bridges - A Comparative Investigation Through Non-Linear Dynamic AnalysesDocument21 pagesA Case Study On The Application of Passive Control and Seismic Isolation Techniques To Cable-Stayed Bridges - A Comparative Investigation Through Non-Linear Dynamic AnalysesJuan Patricio ReyesNo ratings yet
- Vibration Control Using Semi-Active Force Generators: D. KarnoppDocument8 pagesVibration Control Using Semi-Active Force Generators: D. KarnoppLegis FloyenNo ratings yet
- Impedance Matching For HVDCDocument10 pagesImpedance Matching For HVDCNando LópezNo ratings yet
- Park 2014Document10 pagesPark 2014Đỗ DũngNo ratings yet
- Simplified Tidal Barrage For Small-Scale Applications: BackgroundDocument9 pagesSimplified Tidal Barrage For Small-Scale Applications: BackgroundJY GDNo ratings yet
- General Analysis of Vacuum Circuit Breaker Switching OvervoltageDocument9 pagesGeneral Analysis of Vacuum Circuit Breaker Switching Overvoltagemick mayerNo ratings yet
- Robust Predictive Control of High Density Cascaded DC Voltage Link Power ConvertersDocument12 pagesRobust Predictive Control of High Density Cascaded DC Voltage Link Power ConvertersAnonymous fqHGrbwxeFNo ratings yet
- C StructuralDesign DenoonDocument3 pagesC StructuralDesign DenoonmendoncajamNo ratings yet
- An Autonomous Control Scheme of Global Smooth Transitions For Bidirectional DC-DC Converter in DC MicrogridDocument11 pagesAn Autonomous Control Scheme of Global Smooth Transitions For Bidirectional DC-DC Converter in DC MicrogridArifin WibisonoNo ratings yet
- 10 1109@TPWRS 2018 2822315Document9 pages10 1109@TPWRS 2018 2822315samundra24No ratings yet
- Amplitude-Dependent Damping in Vibration Serviceability: Case of A Laboratory FootbridgeDocument16 pagesAmplitude-Dependent Damping in Vibration Serviceability: Case of A Laboratory FootbridgeComering222No ratings yet
- Structural Control Using A Deployable AutonomousDocument21 pagesStructural Control Using A Deployable Autonomousjesus_larrazabal_salasNo ratings yet
- Stability: SheddingDocument2 pagesStability: SheddingLikitha S ShanbougNo ratings yet
- Chapter-2 Literature ReviewDocument9 pagesChapter-2 Literature ReviewMuhammad Sameer AzharNo ratings yet
- Aalborg Universitet: Chen, Linglin Shao, Shuai Xiao, Qian Tarisciotti, Luca Wheeler, Patrick Dragicevic, TomislavDocument11 pagesAalborg Universitet: Chen, Linglin Shao, Shuai Xiao, Qian Tarisciotti, Luca Wheeler, Patrick Dragicevic, TomislavDEBARATI DAMNo ratings yet
- Air-Core Neutral Grounding ReactorsDocument2 pagesAir-Core Neutral Grounding ReactorsharpreetNo ratings yet
- 1 s2.0 S0266892020301016 MainDocument13 pages1 s2.0 S0266892020301016 MainRahul ChaudharyNo ratings yet
- Field Load Tests and Numerical Analysis of Qingzhou Cable-Stayed BridgeDocument10 pagesField Load Tests and Numerical Analysis of Qingzhou Cable-Stayed BridgeHoang Nguyen HuyNo ratings yet
- Dampers Bridges 01 2014 PDFDocument16 pagesDampers Bridges 01 2014 PDFBarben Group CorpNo ratings yet
- Control Energy Consumption and System Performance in Vect 2014 IFAC ProceediDocument6 pagesControl Energy Consumption and System Performance in Vect 2014 IFAC ProceediNguyễn Văn TrungNo ratings yet
- Efficient Calculation of Transient Flow in Simple Pipe NetworksDocument18 pagesEfficient Calculation of Transient Flow in Simple Pipe NetworksPeterNo ratings yet
- Finite Element AnalysisDocument18 pagesFinite Element AnalysisSebin GeorgeNo ratings yet
- Convex Restriction of Power Flow Feasibility SetDocument9 pagesConvex Restriction of Power Flow Feasibility SetCharlesNo ratings yet
- Impact of Series Compensation Insertion in Double HV Transmi...Document8 pagesImpact of Series Compensation Insertion in Double HV Transmi...mlodonovanNo ratings yet
- Finding Neccesary Arrangements in The SystemDocument19 pagesFinding Neccesary Arrangements in The SystemmohansanjayNo ratings yet
- Liquid Column DamperDocument8 pagesLiquid Column Damperchristian reyesNo ratings yet
- Sliding motions in switched networksDocument15 pagesSliding motions in switched networksGabriel MejiaNo ratings yet
- Seismic Response Control of Benchmark Highway Bridge Using Semi Active Hybrid Control System - 2017 - MDocument7 pagesSeismic Response Control of Benchmark Highway Bridge Using Semi Active Hybrid Control System - 2017 - Mسجاد الفNo ratings yet
- Technical Note - Active and Semi-Active Strategies To Control Building Structures Under Large Earthquake Motion - 2015 - MDocument28 pagesTechnical Note - Active and Semi-Active Strategies To Control Building Structures Under Large Earthquake Motion - 2015 - Mسجاد الفNo ratings yet
- Analysis of Hybrid Mass Damper System for Building Vibration ControlDocument5 pagesAnalysis of Hybrid Mass Damper System for Building Vibration Controlسجاد الفNo ratings yet
- Effectiveness of A Fuzzy Controller On The Damage Index of Nonlinear Benchmark BuildingsDocument10 pagesEffectiveness of A Fuzzy Controller On The Damage Index of Nonlinear Benchmark Buildingsسجاد الفNo ratings yet
- Damage Index Monitoring of Structures Using Neural Networks: A. Karamodin, H.HDocument9 pagesDamage Index Monitoring of Structures Using Neural Networks: A. Karamodin, H.Hسجاد الفNo ratings yet
- Robust Control For Structural Systems With Unstructured UncertaintiesDocument10 pagesRobust Control For Structural Systems With Unstructured Uncertaintiesسجاد الفNo ratings yet
- Probabilistic Stability Measures For Controlled Structures Subject To Real Parameter UncertaintiesDocument13 pagesProbabilistic Stability Measures For Controlled Structures Subject To Real Parameter Uncertaintiesسجاد الفNo ratings yet
- Structure Control With Stiffness Uncertainty in Earthquake ZoneDocument5 pagesStructure Control With Stiffness Uncertainty in Earthquake Zoneسجاد الفNo ratings yet
- Uncertainty Modeling For Structural Control Analysis and SynthesisDocument12 pagesUncertainty Modeling For Structural Control Analysis and Synthesisسجاد الفNo ratings yet
- Reliability-Based Measures of Structural Control RobustnessDocument19 pagesReliability-Based Measures of Structural Control Robustnessسجاد الفNo ratings yet
- What Is Normalising?Document3 pagesWhat Is Normalising?AJITHNo ratings yet
- Level_Correction_GuideDocument5 pagesLevel_Correction_GuideAkoKhalediNo ratings yet
- Pipeline ADC TutorialDocument8 pagesPipeline ADC TutorialAlexandre KennedyNo ratings yet
- Ocean Thermal Energy ConversionDocument43 pagesOcean Thermal Energy ConversionMaitry DaveNo ratings yet
- LSI Park Avenue Series Brochure 1990Document8 pagesLSI Park Avenue Series Brochure 1990Alan MastersNo ratings yet
- Perception - An Introduction To The Gestalt-Theorie Kurt Koffka (1922)Document30 pagesPerception - An Introduction To The Gestalt-Theorie Kurt Koffka (1922)evalsegaNo ratings yet
- Retaining Wall DesignDocument11 pagesRetaining Wall DesignSananda BanikNo ratings yet
- IXL - Learn 2nd Grade ScienceDocument2 pagesIXL - Learn 2nd Grade ScienceSyakti PerdanaNo ratings yet
- Radial Vibration Measurements: Operation and Maintenance ManualDocument55 pagesRadial Vibration Measurements: Operation and Maintenance ManualRabah AmidiNo ratings yet
- 31-01-2022 - JR Iit Co SC N120 - Jee Main Model QP FinalDocument14 pages31-01-2022 - JR Iit Co SC N120 - Jee Main Model QP FinalUjib DamianNo ratings yet
- M-Theory and the 11D SupermembraneDocument26 pagesM-Theory and the 11D SupermembranelogwolvyNo ratings yet
- Modeling and Analysis of Dynamic Systems Using Lagrange FormalismDocument21 pagesModeling and Analysis of Dynamic Systems Using Lagrange FormalismstarykNo ratings yet
- Modefied Cooler2Document71 pagesModefied Cooler21977jul100% (2)
- Heat transfer concepts and mechanismsDocument5 pagesHeat transfer concepts and mechanismsanbuvrp0% (1)
- Ray Optics Practice SheetDocument14 pagesRay Optics Practice SheetyashietasethiNo ratings yet
- A311A311M-04 (2015) Standard Specification For Cold-Drawn, Stress-Relieved Carbon Steel Bars Subject To Mechanical Property RequirementsDocument4 pagesA311A311M-04 (2015) Standard Specification For Cold-Drawn, Stress-Relieved Carbon Steel Bars Subject To Mechanical Property RequirementsvantayusdNo ratings yet
- Evergreen Review Number 13 - What Is PataphysicsDocument198 pagesEvergreen Review Number 13 - What Is Pataphysicsthomas.patteson6837100% (2)
- Gear and Screw Thread MetrologyDocument34 pagesGear and Screw Thread Metrologykunj ranaNo ratings yet
- Skripsi Tanpa Bab PembahasanDocument147 pagesSkripsi Tanpa Bab PembahasanDzirana SekarNo ratings yet
- Methane Steam ReformingDocument29 pagesMethane Steam Reformingnganphap67% (6)
- EC35C BrochureDocument12 pagesEC35C Brochuredalibor_bogdanNo ratings yet
- Stainless Steel & Sugar Industry ReportDocument13 pagesStainless Steel & Sugar Industry Reportapi-19798491No ratings yet
- 645 SNL SirishaDocument9 pages645 SNL SirishaSonaliNo ratings yet
- Activities The Nature of Science in Science EducationDocument49 pagesActivities The Nature of Science in Science EducationJoséRamónOrrantiaCavazosNo ratings yet
- 4 Pure BendingDocument23 pages4 Pure BendingRegine OlayaNo ratings yet
- Capek Characteristic ModesDocument82 pagesCapek Characteristic ModesAnthony NguyenNo ratings yet
- Coherent OscillationsDocument10 pagesCoherent OscillationsAlejandraNo ratings yet
- Sa121 128Document2 pagesSa121 128Abhijit KerkarNo ratings yet
- Vibration Control by Piezoelectric Materials: A Review: AbstractDocument5 pagesVibration Control by Piezoelectric Materials: A Review: AbstractJai KumarNo ratings yet
- 1 Electric Circuits Questions ADocument3 pages1 Electric Circuits Questions Aapi-354541204100% (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessFrom EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessNo ratings yet
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- Foundations of Western Civilization II: A History of the Modern Western World (Transcript)From EverandFoundations of Western Civilization II: A History of the Modern Western World (Transcript)Rating: 4.5 out of 5 stars4.5/5 (12)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)