You might also like
- Mechanics of Carbon Nanotubes: Fundamentals, Modeling and SafetyFrom EverandMechanics of Carbon Nanotubes: Fundamentals, Modeling and SafetyNo ratings yet
- Matrix Converter1Document131 pagesMatrix Converter1Zakaria ElbarbaryNo ratings yet
- CVD of NonmetalsFrom EverandCVD of NonmetalsWilliam S. Rees, Jr.No ratings yet
- TennesseDocument96 pagesTennesseAkshathaNo ratings yet
- Ema 5Document596 pagesEma 5PCGNo ratings yet
- Guo RongDocument118 pagesGuo Rongpower systemNo ratings yet
- Aditya KunwarDocument190 pagesAditya KunwarMaheshNo ratings yet
- Zhu - Yutong ThesisDocument146 pagesZhu - Yutong ThesisSalmi Nour E'ddineNo ratings yet
- Khan Nameer A 201911 MAS ThesisDocument87 pagesKhan Nameer A 201911 MAS ThesisNiamatullah WazirNo ratings yet
- University Dissertation Free Sample22Document171 pagesUniversity Dissertation Free Sample22Osama AttookNo ratings yet
- Finite Element Beam Model For Piezoelectric Energy Harvesting UsiDocument111 pagesFinite Element Beam Model For Piezoelectric Energy Harvesting UsiViktor BakacsNo ratings yet
- Design Considerations of High Voltage AnDocument114 pagesDesign Considerations of High Voltage AnEL BRIGHLINo ratings yet
- Unit Commitment Methods To Accommodate High Levels of Wind GeneraDocument79 pagesUnit Commitment Methods To Accommodate High Levels of Wind GeneraAli AlSowaidiNo ratings yet
- Akash E Juras 060216Document71 pagesAkash E Juras 060216akashkumarswain213No ratings yet
- Bess 1Document180 pagesBess 1dan_geplNo ratings yet
- Experimental Determination of Parameters of Synchronous GeneratorDocument116 pagesExperimental Determination of Parameters of Synchronous Generatorcarlos vidal100% (1)
- Redox EnergyDocument119 pagesRedox EnergyNikhilAsudaniNo ratings yet
- Guanliang Liu Final DissertationDocument205 pagesGuanliang Liu Final DissertationBaskar ElumalaiNo ratings yet
- Computational Methods in Heterogeneous Catalysis PDFDocument127 pagesComputational Methods in Heterogeneous Catalysis PDFAminu HassanNo ratings yet
- Nasrallah Yamen 2012 ThesisDocument127 pagesNasrallah Yamen 2012 ThesisSachin GosaviNo ratings yet
- Modeling and Control of A Modular Battery Management System For LDocument106 pagesModeling and Control of A Modular Battery Management System For LdftghsNo ratings yet
- State of Charge of An BateryDocument69 pagesState of Charge of An BateryBogdan AdeleanNo ratings yet
- Vehicle-To-Grid (V2G) Reactive Power Operation Analysis of The EVDocument161 pagesVehicle-To-Grid (V2G) Reactive Power Operation Analysis of The EVLászló KovácsNo ratings yet
- 2011 Performance Characterization and Cost Assessment of An Iron Hybrid Flow BatteryDocument136 pages2011 Performance Characterization and Cost Assessment of An Iron Hybrid Flow Batterychaitu reddyNo ratings yet
- Braff ThesisDocument163 pagesBraff ThesisDeepak KumarNo ratings yet
- DC Distribution Systems XDocument64 pagesDC Distribution Systems XFranciscoChezsanCardenasNo ratings yet
- A DSP Controlled Multi-Level Inverter Providing DC-link Voltage Balancing, Ride-Through Enhancement and Common-Mode Voltage EliminationDocument100 pagesA DSP Controlled Multi-Level Inverter Providing DC-link Voltage Balancing, Ride-Through Enhancement and Common-Mode Voltage EliminationROSMADI BIN ABDULLAHNo ratings yet
- 01-Modeling, Simulation, and Design of Hybrid EV Battery Charger For Optimum Grid Utilization, PSIMDocument108 pages01-Modeling, Simulation, and Design of Hybrid EV Battery Charger For Optimum Grid Utilization, PSIMViet Anh DoNo ratings yet
- Analytical Performance Evaluationof Thermoelectric Modules UsingDocument155 pagesAnalytical Performance Evaluationof Thermoelectric Modules UsingFritz Gerald JimenoNo ratings yet
- Analysis and Design of A500 WDC TransformerDocument63 pagesAnalysis and Design of A500 WDC TransformerVincent NSASINo ratings yet
- A Compact and Portable EMP Generator Based On Tesla Transformer TechnologyDocument200 pagesA Compact and Portable EMP Generator Based On Tesla Transformer Technologyjake polNo ratings yet
- 2016 - Modelling and Control of Hybrid LCC HVDC System - Ying XueDocument167 pages2016 - Modelling and Control of Hybrid LCC HVDC System - Ying XueAaron CrucesNo ratings yet
- A Hybrid Cavity and Parallel-Plate PEEC Method For Analysis of CoDocument69 pagesA Hybrid Cavity and Parallel-Plate PEEC Method For Analysis of CoAparna KannanNo ratings yet
- Vector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsDocument206 pagesVector-Based Peak Current Analysis During Wafer Test of Flip-Chip DesignsLakshman YandapalliNo ratings yet
- Numerical Implementation of The Hilbert Transform - XianglingWangDocument147 pagesNumerical Implementation of The Hilbert Transform - XianglingWangMichael MargoleseNo ratings yet
- 02 WholeDocument194 pages02 WholehuikwanyNo ratings yet
- Smart Battery Management System For Electric VehiclesDocument135 pagesSmart Battery Management System For Electric VehiclesAnonymous tzIXaHx150% (2)
- Zhu Li 2011Document106 pagesZhu Li 2011Dante FilhoNo ratings yet
- Antennas and Metamaterials For Electromagnetic EneDocument63 pagesAntennas and Metamaterials For Electromagnetic EneÇağlar KayaNo ratings yet
- MS Thesis Antenna DesignDocument79 pagesMS Thesis Antenna DesignUmer Khan100% (3)
- Co-Simulation of Back-To-Back VSC Transmission SystemDocument95 pagesCo-Simulation of Back-To-Back VSC Transmission SystemJoniNo ratings yet
- RC SnubberDocument88 pagesRC SnubberDavid SanchezNo ratings yet
- ThesisDocument90 pagesThesisTikuochi IheukwumereNo ratings yet
- A User Programmable Battery Charging Sys PDFDocument168 pagesA User Programmable Battery Charging Sys PDFAl AidenNo ratings yet
- Modeling and Application ofDocument210 pagesModeling and Application ofyq zhangNo ratings yet
- Vibration-to-Electric Energy Conversion Using A Mechanically-Varied CapacitorDocument133 pagesVibration-to-Electric Energy Conversion Using A Mechanically-Varied Capacitorlector20No ratings yet
- FlyWheel ProjectDocument150 pagesFlyWheel ProjectJarbeta CantôNo ratings yet
- SAMAVATIAN 2019 DiffusionDocument214 pagesSAMAVATIAN 2019 DiffusionLuis Eduardo VielmaNo ratings yet
- Dual Source Excitation Rectangular Waveguide Design and Evaluatio PDFDocument99 pagesDual Source Excitation Rectangular Waveguide Design and Evaluatio PDFnbhyblijunNo ratings yet
- Design Modeling and Control of A Thermal Management SystemDocument185 pagesDesign Modeling and Control of A Thermal Management Systemflorin chisNo ratings yet
- Advancements in Transmission Line Fault LocationDocument143 pagesAdvancements in Transmission Line Fault LocationtunghtdNo ratings yet
- 2 PhDThesis Design Improvement of Crossflow Hydro TurbineDocument240 pages2 PhDThesis Design Improvement of Crossflow Hydro TurbineSantiago G100% (1)
- Gilles ThesisDocument124 pagesGilles ThesisTomás CarreiraNo ratings yet
- PHD Thesis Bing Han 200992093 (Nov 2019)Document197 pagesPHD Thesis Bing Han 200992093 (Nov 2019)Muhammad Aseer KhanNo ratings yet
- Sizing, Dynamic Modelling and Control of A Solar Water Pumping System For IrrigationDocument140 pagesSizing, Dynamic Modelling and Control of A Solar Water Pumping System For Irrigationmazinja bandaNo ratings yet
- Bsim 3 V 3 ManualDocument186 pagesBsim 3 V 3 Manualapi-3733564No ratings yet
- Design of A Wide-Swing Cascode Beta Multiplier Current Reference PDFDocument64 pagesDesign of A Wide-Swing Cascode Beta Multiplier Current Reference PDFYousef BilbeisiNo ratings yet
- Amanuel MekonnenDocument125 pagesAmanuel Mekonnenabata yohannesNo ratings yet
- No - Ntnu Inspera 79786156 64576396Document173 pagesNo - Ntnu Inspera 79786156 64576396Thành ViếtNo ratings yet
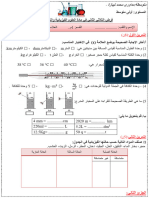
- Dzexams 1am Physique 557318Document5 pagesDzexams 1am Physique 557318annaNo ratings yet
- Open Circuit Voltage Comes From Non Equilibrium ThermodynamicsDocument18 pagesOpen Circuit Voltage Comes From Non Equilibrium ThermodynamicsannaNo ratings yet
- Energies 11 03444Document15 pagesEnergies 11 03444annaNo ratings yet
- Applsci 10 01009 v2Document21 pagesApplsci 10 01009 v2annaNo ratings yet
- Lei 2019 J. Phys. Conf. Ser. 1325 012173Document7 pagesLei 2019 J. Phys. Conf. Ser. 1325 012173annaNo ratings yet
- IET Energy Syst Integration - 2021 - Kumar - Battery Charging Topology Infrastructure and Standards For Electric VehicleDocument17 pagesIET Energy Syst Integration - 2021 - Kumar - Battery Charging Topology Infrastructure and Standards For Electric VehicleannaNo ratings yet
- Ain Shams Engineering JournalDocument17 pagesAin Shams Engineering JournalVishal KevatNo ratings yet
- 10 1109EITech 2017 8255296Document6 pages10 1109EITech 2017 8255296AchrafSaadaouiNo ratings yet
- Li 2018Document6 pagesLi 2018annaNo ratings yet
- Amirkafi 2018Document6 pagesAmirkafi 2018annaNo ratings yet
- Battery Open-Circuit Voltage Estimation by A Method of Statistical AnalysisDocument4 pagesBattery Open-Circuit Voltage Estimation by A Method of Statistical AnalysisannaNo ratings yet
- PPEECS Sample FileDocument3 pagesPPEECS Sample FileannaNo ratings yet
- PID4301545Document7 pagesPID4301545annaNo ratings yet
- Optimally Designed DC-DCDocument33 pagesOptimally Designed DC-DCannaNo ratings yet
- Kahia 2015Document4 pagesKahia 2015annaNo ratings yet
- Huing Hueisu2002Document9 pagesHuing Hueisu2002annaNo ratings yet
- Journal of Energy and Power TechnologyDocument24 pagesJournal of Energy and Power TechnologyannaNo ratings yet
- The Wavelet-Based Artificial Neural Network For State of Charge Estimation in Lithium Ion BatteryDocument13 pagesThe Wavelet-Based Artificial Neural Network For State of Charge Estimation in Lithium Ion BatteryannaNo ratings yet
- A New Optimum Topology Switching Oc-To-Oc ConverterDocument20 pagesA New Optimum Topology Switching Oc-To-Oc ConverterannaNo ratings yet
- Adaptive Artificial Neural Network Based Models For Instantaneous Power Estimation Enhancement in Electric Vehicles' Li-Ion BatteriesDocument10 pagesAdaptive Artificial Neural Network Based Models For Instantaneous Power Estimation Enhancement in Electric Vehicles' Li-Ion BatteriesannaNo ratings yet
- FinalPaperDesign and Simulation of PID Controller For Power Electronics Converter Circuits170541Document6 pagesFinalPaperDesign and Simulation of PID Controller For Power Electronics Converter Circuits170541annaNo ratings yet
- Data-Driven Health Estimation and Lifetime Prediction of Lithium-Ion Batteries: A ReviewDocument61 pagesData-Driven Health Estimation and Lifetime Prediction of Lithium-Ion Batteries: A ReviewannaNo ratings yet
- Development of Bi-Directional DC/DC Converter For Fuel Cell Hybrid VehicleDocument17 pagesDevelopment of Bi-Directional DC/DC Converter For Fuel Cell Hybrid VehicleannaNo ratings yet
- Bidirectional DC-DC Converter Fed Drive For Electric Vehicle SystemDocument10 pagesBidirectional DC-DC Converter Fed Drive For Electric Vehicle SystemPritam YaduvanshiNo ratings yet
- A General Unified Approach To Modelling Switching Dc-To-Dc Converters in Discontinuous Conduction ModeDocument22 pagesA General Unified Approach To Modelling Switching Dc-To-Dc Converters in Discontinuous Conduction ModeannaNo ratings yet
- DC DC ModellingDocument5 pagesDC DC ModellingBejoy BabuNo ratings yet
- Bidirectional DC/DC Power Converter For Hybrid Yacht Propulsion SystemDocument10 pagesBidirectional DC/DC Power Converter For Hybrid Yacht Propulsion SystemannaNo ratings yet
- Development of Bi-Directional DC/DC Converter For Fuel Cell Hybrid VehicleDocument17 pagesDevelopment of Bi-Directional DC/DC Converter For Fuel Cell Hybrid VehicleannaNo ratings yet
- A New Optimum Topology Switching Oc-To-Oc ConverterDocument20 pagesA New Optimum Topology Switching Oc-To-Oc ConverterannaNo ratings yet
- Detailed Syllabus DDITDocument80 pagesDetailed Syllabus DDITKafaNo ratings yet
- Merlin Gerin Compact NS400 N Data SheetDocument3 pagesMerlin Gerin Compact NS400 N Data SheetPatryk JarczyńskiNo ratings yet
- Fiitjee: Solutions To JEE (Main) - 2021Document41 pagesFiitjee: Solutions To JEE (Main) - 2021ik62299No ratings yet
- Jeumont Schneider Track Circuits PDFDocument60 pagesJeumont Schneider Track Circuits PDFCristian D. Rodríguez VillamizarNo ratings yet
- Chapter 3 Mesh and Nodal AnalysisDocument27 pagesChapter 3 Mesh and Nodal Analysisthines raveentraanNo ratings yet
- A L L Diagnostic Trouble Codes (DTC) : P Code Charts P0713Document5 pagesA L L Diagnostic Trouble Codes (DTC) : P Code Charts P0713José Garcia.No ratings yet
- Resonance Problem SheetDocument18 pagesResonance Problem SheetJayanthiKathiresanNo ratings yet
- AC Analysis by MATLABDocument27 pagesAC Analysis by MATLABYaman SoudanNo ratings yet
- Uitm-Fkestudent - Handbook. - Final Edited Version - 13 Dis. 2011-EditDocument99 pagesUitm-Fkestudent - Handbook. - Final Edited Version - 13 Dis. 2011-EditsilentsioNo ratings yet
- Linear Algebra WWL ChenDocument238 pagesLinear Algebra WWL ChenJimmy HsuNo ratings yet
- BEE Question Bank 2 PDFDocument2 pagesBEE Question Bank 2 PDFchaitanyaNo ratings yet
- DS2000 Full Digital Servodrives For Brushless Motors Suitable For Universal Power SupplyDocument16 pagesDS2000 Full Digital Servodrives For Brushless Motors Suitable For Universal Power SupplybirricaNo ratings yet
- CE2004 Circuit and Signal Analysis Chapter 1Document84 pagesCE2004 Circuit and Signal Analysis Chapter 1Lihau TanNo ratings yet
- Experiment#5 DC Circuit Measurements-Part B: Electrical Circuits Lab 0905212Document5 pagesExperiment#5 DC Circuit Measurements-Part B: Electrical Circuits Lab 0905212aliyahNo ratings yet
- 150W MP3 Car AmplifierDocument10 pages150W MP3 Car AmplifierLarry DimaiwatNo ratings yet
- Cfs0018 UK R1 Menvier-MF9300 RangeDocument4 pagesCfs0018 UK R1 Menvier-MF9300 RangebdsisiraNo ratings yet
- AC Circuit Analysis - Alexander SchureDocument100 pagesAC Circuit Analysis - Alexander SchureDr. Gollapalli Naresh100% (1)
- Saudi Aviation Mech TrainingDocument82 pagesSaudi Aviation Mech TrainingAnonymous C9ZNFkrb60% (2)
- Solved Subjective Problems: V Ir 5 16 80 VoltDocument9 pagesSolved Subjective Problems: V Ir 5 16 80 VoltAdNo ratings yet
- Prepware Questions GeneralDocument150 pagesPrepware Questions GeneralGustavo Nárez Jr.100% (1)
- Rishi Physics Investigatory - VasuDocument21 pagesRishi Physics Investigatory - Vasujaxib70508No ratings yet
- Clapp OscillatorDocument5 pagesClapp OscillatorDamon LeongNo ratings yet
- Instruction Manual: FOR Underfrequency/Overvoltage Module Models: UFOV 250A & UFOV 260ADocument22 pagesInstruction Manual: FOR Underfrequency/Overvoltage Module Models: UFOV 250A & UFOV 260ATurnerNo ratings yet
- NI-Tutorial-14516-En - Noise Analysis in MultisimDocument10 pagesNI-Tutorial-14516-En - Noise Analysis in Multisimwert1a2No ratings yet
- Electrical Engineering (Jan - 2018)Document8 pagesElectrical Engineering (Jan - 2018)aatityasriNo ratings yet
- Basic Circuit TheoryDocument11 pagesBasic Circuit Theoryjorge william ramirezNo ratings yet
- UT Dallas Syllabus For Te3101.105.11f Taught by (fxc091000)Document2 pagesUT Dallas Syllabus For Te3101.105.11f Taught by (fxc091000)UT Dallas Provost's Technology GroupNo ratings yet
- 201105icpstutorialmanual 151228020532Document105 pages201105icpstutorialmanual 151228020532putrasejahtraNo ratings yet
- Fault Code 800142 J1939 Time OutDocument12 pagesFault Code 800142 J1939 Time OutJustice Machiwana100% (1)
- Tutorial 12 Alternating Current CircuitDocument3 pagesTutorial 12 Alternating Current Circuithuijing966No ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- The Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeFrom EverandThe Boy Who Harnessed the Wind: Creating Currents of Electricity and HopeRating: 4 out of 5 stars4/5 (130)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Biogas Production: Pretreatment Methods in Anaerobic DigestionFrom EverandBiogas Production: Pretreatment Methods in Anaerobic DigestionNo ratings yet
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)