You might also like
- Omega HandoutDocument10 pagesOmega HandoutVey Alvezo IwaratNo ratings yet
- E Nav TopicsDocument202 pagesE Nav TopicsJade EspirituNo ratings yet
- Fig: Dual Beam CRO With Separate Time BasesDocument27 pagesFig: Dual Beam CRO With Separate Time BasesYashaswiniNo ratings yet
- Loran C: L RA N CDocument21 pagesLoran C: L RA N CRostamedastanNo ratings yet
- R, R + S I N 0: Target-Reflection Characteristics and AngularDocument2 pagesR, R + S I N 0: Target-Reflection Characteristics and Angularanjali9myneniNo ratings yet
- Cvor DvorDocument21 pagesCvor DvorMinh Trí Nguyễn (Minh Kio)No ratings yet
- Unit 5 - MTInPDR - Part BDocument68 pagesUnit 5 - MTInPDR - Part BChandrashekher CNo ratings yet
- Experiment1 WaveguideBenchDocument6 pagesExperiment1 WaveguideBenchRishikant KashyapNo ratings yet
- Hyperbolic Radio NavigationDocument17 pagesHyperbolic Radio NavigationRe-ownRe-veNo ratings yet
- How To Understand The Workings of Radio ControlDocument6 pagesHow To Understand The Workings of Radio ControlHenry SimamoraNo ratings yet
- Chapter-4 Dr. Palvi GuptaDocument20 pagesChapter-4 Dr. Palvi GuptaTarun Kumar 448No ratings yet
- Tutorial ProblemsDocument11 pagesTutorial ProblemsMani VrsNo ratings yet
- Loran CDocument21 pagesLoran CArslan ShaukatNo ratings yet
- Continuous Wave RadarDocument6 pagesContinuous Wave RadarVenkat SaiNo ratings yet
- Awn Part04Document27 pagesAwn Part04abdulaziz saif ali mansoorNo ratings yet
- Special Oscilloscopes - 01 - Biasing at Point 7Document6 pagesSpecial Oscilloscopes - 01 - Biasing at Point 7Shane LaraNo ratings yet
- Radio Navigation DemoDocument6 pagesRadio Navigation Demoutkarsh_maruNo ratings yet
- High-Frequency Phase DetectionDocument6 pagesHigh-Frequency Phase Detectionmohan sardarNo ratings yet
- Block Diagram of Conical ScanDocument11 pagesBlock Diagram of Conical Scanvasudeva sharmaNo ratings yet
- Wavelength Conversion ApproachesDocument7 pagesWavelength Conversion ApproachesgethcyNo ratings yet
- RT-CH 5 - Tracking RadarDocument13 pagesRT-CH 5 - Tracking RadarHemant YadavNo ratings yet
- Lecture 16Document2 pagesLecture 16RidhamNo ratings yet
- Hyperbolic Navigation System: Buenaventura, Jazzen G. Ruiz, Muel Fred L. Sabido, Alvin TDocument40 pagesHyperbolic Navigation System: Buenaventura, Jazzen G. Ruiz, Muel Fred L. Sabido, Alvin TNancy Cutin100% (1)
- A Radio Survey SystemDocument6 pagesA Radio Survey SystemCrssNo ratings yet
- DVOR-DME - Principle of Operation VORDocument7 pagesDVOR-DME - Principle of Operation VORdouglazmNo ratings yet
- Amplitude Shift Keying (ASK) : Experiment No.6Document14 pagesAmplitude Shift Keying (ASK) : Experiment No.6Mhamad OmerNo ratings yet
- Ce Lab-2Document12 pagesCe Lab-2Azeem NadirshaNo ratings yet
- Why Sweep Generator Is Called Time Base Generator?Document4 pagesWhy Sweep Generator Is Called Time Base Generator?prabodhmNo ratings yet
- Radar Systems II: Dept & Sem: Subject Name: Course Code: Unit: Prepared byDocument44 pagesRadar Systems II: Dept & Sem: Subject Name: Course Code: Unit: Prepared bySureshbabu PNo ratings yet
- CRO Controls From The Front PanelDocument6 pagesCRO Controls From The Front PanelVarunKumar100% (1)
- NAV 3 Electronic Navigation and Compasses Part 1Document225 pagesNAV 3 Electronic Navigation and Compasses Part 1Mika MedinaNo ratings yet
- 2 Marks-Unit-1Document143 pages2 Marks-Unit-1Thenappan SNo ratings yet
- Geodesy With GPS: Prof. M R Sivaraman 2 January 2019 Sixth Talk of The Webinar A Course of GeodesyDocument58 pagesGeodesy With GPS: Prof. M R Sivaraman 2 January 2019 Sixth Talk of The Webinar A Course of GeodesyPrasanna NaikNo ratings yet
- Acs - Analog Communication Systems ManualDocument56 pagesAcs - Analog Communication Systems ManualAmandeep SinghNo ratings yet
- Solved Prob. chp1 3rd YearDocument16 pagesSolved Prob. chp1 3rd Yearalifadhil989898No ratings yet
- Introduction To Loran C: 1200. HistoryDocument18 pagesIntroduction To Loran C: 1200. HistoryKevinAngeloMaNo ratings yet
- EXP 8 - Time Division Multiplexing & De-Multiplexing (TDM) PDFDocument8 pagesEXP 8 - Time Division Multiplexing & De-Multiplexing (TDM) PDFYerneni SasankNo ratings yet
- Electronic NavigationdfvDocument6 pagesElectronic NavigationdfvMytha Isabel SalesNo ratings yet
- 02.Gps Signals Structure - Lect2 - 3Document85 pages02.Gps Signals Structure - Lect2 - 3wdhishaNo ratings yet
- Oscilloscope For Circuits 2Document39 pagesOscilloscope For Circuits 2John GutierrezNo ratings yet
- LoranDocument18 pagesLoranRostamedastanNo ratings yet
- Microwave MeasurementsDocument9 pagesMicrowave MeasurementsNagaraju MunigalaNo ratings yet
- Chapter 2 - Gps SignalsDocument22 pagesChapter 2 - Gps SignalsDejenie DereseNo ratings yet
- Hyperbolic NavigationDocument68 pagesHyperbolic Navigationjayaramjaya1996No ratings yet
- Loran Navigation SystemDocument18 pagesLoran Navigation SystemChebychevNo ratings yet
- Mil and Pi1Ijr Doi'Imfr KadahDocument2 pagesMil and Pi1Ijr Doi'Imfr Kadahanjali9myneniNo ratings yet
- Laboratory 2 OscilloscopeDocument9 pagesLaboratory 2 Oscilloscopenurhafiqah100% (1)
- Microwave Engineering Lab Report - Experiment-2Document6 pagesMicrowave Engineering Lab Report - Experiment-2GaneshNo ratings yet
- TD592BDocument1 pageTD592Briyadh bsisoNo ratings yet
- 00982262Document11 pages00982262Balkrushna KankotiyaNo ratings yet
- Optica Articulo 1Document5 pagesOptica Articulo 1james3030No ratings yet
- AC Lab Manual For EceDocument55 pagesAC Lab Manual For EceV SATYA KISHORE100% (1)
- Automatic Railway Gate ControlDocument14 pagesAutomatic Railway Gate Controlapi-26871643100% (23)
- 1.1.13 Precision Secondary RadarDocument7 pages1.1.13 Precision Secondary Radarln zNo ratings yet
- Decca Navigation SystemDocument11 pagesDecca Navigation SystemChebychevNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- RC 4 GsDocument28 pagesRC 4 GssylvainmuloinNo ratings yet
- Nu Esat Refresher 2Document77 pagesNu Esat Refresher 2PortgasD.AceNo ratings yet
- Elektor 'Ultima' Loopstick VLF AntennaDocument3 pagesElektor 'Ultima' Loopstick VLF AntennaEnrique Palacio100% (1)
- Xpander Product GuideDocument16 pagesXpander Product GuideguilhermegomNo ratings yet
- CD70Navi ManualDocument70 pagesCD70Navi ManualRoel PlmrsNo ratings yet
- Viva Questions For Advanced Communication LabDocument4 pagesViva Questions For Advanced Communication Labanittadevadas57% (7)
- Multi Single ResultsDocument1 pageMulti Single Resultsea1wxNo ratings yet
- Manual de UsuarioDocument12 pagesManual de UsuarioPatricio Alexander Marin GuerraNo ratings yet
- Course Objectives and Outcomes ListDocument1 pageCourse Objectives and Outcomes ListHARIPRASATH ECENo ratings yet
- Communication System ProjectDocument6 pagesCommunication System ProjectAbhay Sahu.No ratings yet
- TBXLHA 6565C VTM Product SpecificationsDocument4 pagesTBXLHA 6565C VTM Product SpecificationsSpam SpamNo ratings yet
- ATPCDocument22 pagesATPCamritanshu tripathiNo ratings yet
- Car Radio ManualDocument17 pagesCar Radio ManualJustice Ankamah JnrNo ratings yet
- Military Operations in Urban Terrain (MOUT) Part 2Document174 pagesMilitary Operations in Urban Terrain (MOUT) Part 2GasMaskBob100% (1)
- Touch Probes enDocument44 pagesTouch Probes enMonteagudoNo ratings yet
- Global Positioning SystemDocument11 pagesGlobal Positioning SystemPradeep CheekatlaNo ratings yet
- 12 December 1988Document108 pages12 December 1988Monitoring TimesNo ratings yet
- Manual Kannad 406 AP PDFDocument60 pagesManual Kannad 406 AP PDFGinanjar PranathaNo ratings yet
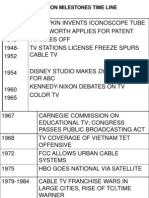
- 1923 1927 1948 1948-1952 Zworykin Invents Iconoscope Tube Farnsworth Applies For Patent TV Takes Off TV Stations License Freeze Spurs Cable TVDocument12 pages1923 1927 1948 1948-1952 Zworykin Invents Iconoscope Tube Farnsworth Applies For Patent TV Takes Off TV Stations License Freeze Spurs Cable TVJny Germayne JimahNo ratings yet
- Voy 022-B - Jose To Sikka - Passage PlanDocument20 pagesVoy 022-B - Jose To Sikka - Passage PlanClaus AlinNo ratings yet
- 96-Enr 2.1 Fir, Uta, FSS, Cta, Tma Amdt 83 24 Oct 19Document27 pages96-Enr 2.1 Fir, Uta, FSS, Cta, Tma Amdt 83 24 Oct 19Chindy M AnggraeniNo ratings yet
- Tallysman® TW3972 DatasheetDocument2 pagesTallysman® TW3972 DatasheetAsim QureshiNo ratings yet
- Smart S Mk2 October 2010 HRDocument2 pagesSmart S Mk2 October 2010 HRbujor2000ajaNo ratings yet
- Power Drill PDFDocument40 pagesPower Drill PDFStuart HartenNo ratings yet
- Module 3 - Electronic Media - Part 1Document20 pagesModule 3 - Electronic Media - Part 1cyrus12009No ratings yet
- Comcas 2015 Registration Very LightDocument1 pageComcas 2015 Registration Very LightEng Burhaanudiin CumarNo ratings yet
- Iloud MicroMonitor Start-GuideDocument20 pagesIloud MicroMonitor Start-GuidePatrick HartonoNo ratings yet
- Topic 4 Nautical Publication and MessagesDocument6 pagesTopic 4 Nautical Publication and MessagesearlfredruckNo ratings yet
- Wireless Technology in Day To Day LifeDocument36 pagesWireless Technology in Day To Day LifeShivaram K ViswanathanNo ratings yet