You might also like
- NCS21 - 01 - Introduction To Nonlinear ControlDocument18 pagesNCS21 - 01 - Introduction To Nonlinear Controlzain khuramNo ratings yet
- Complete Syllabus Mechanical-MinDocument191 pagesComplete Syllabus Mechanical-MinSalman Mohd HNo ratings yet
- Assignment R New 1Document26 pagesAssignment R New 1Sohel RanaNo ratings yet
- Signals and System (3+1) DE-40 EE Semester 4 Spring 2020: Lab Report # 04Document8 pagesSignals and System (3+1) DE-40 EE Semester 4 Spring 2020: Lab Report # 04Muhammad YousafNo ratings yet
- Assignment 2 Mba 652 PDFDocument11 pagesAssignment 2 Mba 652 PDFRishav Shiv RanjanNo ratings yet
- Assignment Power System DynamicsDocument9 pagesAssignment Power System DynamicsBittu AgarwalNo ratings yet
- Econometrics FinalDocument16 pagesEconometrics FinalDanikaLiNo ratings yet
- Lab 1 Laura AmengualDocument7 pagesLab 1 Laura AmengualAlvaro RabosoNo ratings yet
- Lab-5-1-Regression and Multiple RegressionDocument8 pagesLab-5-1-Regression and Multiple RegressionRakib Khan100% (1)
- FCS LabDocument12 pagesFCS LabdfdafdsfasdgNo ratings yet
- Experiment 4 - Lagrange Polynomial ApproximationDocument2 pagesExperiment 4 - Lagrange Polynomial Approximationmuzahir.ali.baloch2021No ratings yet
- Lab Report 8 Nmce: (Numerical Methods in Chemical Engineering) by Muhammad JawadDocument10 pagesLab Report 8 Nmce: (Numerical Methods in Chemical Engineering) by Muhammad Jawadmuhammad jawadNo ratings yet
- Lab No.5Document3 pagesLab No.5David JamesNo ratings yet
- MAT2001 - Statistics For Engineers: Embedded Lab Using R Statistical SoftwareDocument10 pagesMAT2001 - Statistics For Engineers: Embedded Lab Using R Statistical SoftwareR B SHARANNo ratings yet
- Communication System Jto Lice Study Material SampleDocument16 pagesCommunication System Jto Lice Study Material SampleArghya PalNo ratings yet
- Experiment 5 - Newton's Divided DifferenceDocument1 pageExperiment 5 - Newton's Divided Differencemuzahir.ali.baloch2021No ratings yet
- MAT2001-Statistics For Engineers: Embedded Lab-R Statistical SoftwareDocument12 pagesMAT2001-Statistics For Engineers: Embedded Lab-R Statistical SoftwareApoorv SinghNo ratings yet
- Lab No.10Document3 pagesLab No.10David JamesNo ratings yet
- MAT2001 - Statistics For Engineers: Embedded LabDocument6 pagesMAT2001 - Statistics For Engineers: Embedded LabFarith AhamedNo ratings yet
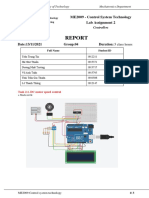
- Date:13/11/2021 Group:04 Duration:: ME2009 - Control System Technology Lab Assignment 2Document12 pagesDate:13/11/2021 Group:04 Duration:: ME2009 - Control System Technology Lab Assignment 2NHÂN NGUYỄN HỮUNo ratings yet
- University of Engineering & Technology Main Campus, PeshawarDocument30 pagesUniversity of Engineering & Technology Main Campus, PeshawarAlina RazaNo ratings yet
- Assignment 2 Viscous DampingDocument4 pagesAssignment 2 Viscous DampingMuhammad TayyabNo ratings yet
- Daffodil International University Lab Report: Proportional ControlDocument6 pagesDaffodil International University Lab Report: Proportional ControlAbdullahNo ratings yet
- CSE AssignmentDocument10 pagesCSE AssignmentISHIKA BALSAMANTANo ratings yet
- Sheet 6Document1 pageSheet 6workomar97No ratings yet
- Bilal Ahmad Ai & DSS Assign # 02Document5 pagesBilal Ahmad Ai & DSS Assign # 02Bilal AhmadNo ratings yet
- Experiment 8 - Runge - Kutta Method of Order Four (RK - 4)Document1 pageExperiment 8 - Runge - Kutta Method of Order Four (RK - 4)muzahir.ali.baloch2021No ratings yet
- Project No. 03: Submitted By: Khalil AhmadDocument5 pagesProject No. 03: Submitted By: Khalil AhmadKhalil AhmadNo ratings yet
- 20miy0018 VL2022230102069 Ast01Document10 pages20miy0018 VL2022230102069 Ast01Ruban RajNo ratings yet
- Solutions To Nonlinear Differential EquationsDocument8 pagesSolutions To Nonlinear Differential EquationsEhaqueNNo ratings yet
- Assignment 5 Phase AngleDocument5 pagesAssignment 5 Phase AngleMuhammad TayyabNo ratings yet
- Indian Institute of Technology (ISM) Dhanbad-826004: SubjectDocument5 pagesIndian Institute of Technology (ISM) Dhanbad-826004: SubjectRakhi SinghNo ratings yet
- Lab No.6Document3 pagesLab No.6David JamesNo ratings yet
- Linear Programming Method Application in A Solar CellDocument12 pagesLinear Programming Method Application in A Solar CellKaty Flores OrihuelaNo ratings yet
- University of Gujrat: Department of Management SciencesDocument10 pagesUniversity of Gujrat: Department of Management SciencesUmarNo ratings yet
- University of Gujrat: Department of Management SciencesDocument16 pagesUniversity of Gujrat: Department of Management SciencesUmarNo ratings yet
- Course Title: Digital Signal Processing I Lab Course Code: EEE 314Document3 pagesCourse Title: Digital Signal Processing I Lab Course Code: EEE 314Mehedi HasanNo ratings yet
- R1D116031 CH5Document9 pagesR1D116031 CH5Safar Budi SantosoNo ratings yet
- Lab Task2 20bec0087Document13 pagesLab Task2 20bec0087Athira VijayanNo ratings yet
- National University of Sciences & Technology PakistanDocument25 pagesNational University of Sciences & Technology PakistanRakhmeen GulNo ratings yet
- Lab No.11Document3 pagesLab No.11David JamesNo ratings yet
- Hypothesis Testing: Chi Square Tests: Test of Goodness of FitDocument3 pagesHypothesis Testing: Chi Square Tests: Test of Goodness of FitSD VivekNo ratings yet
- Final Exam 2018 Ae Sample 1Document6 pagesFinal Exam 2018 Ae Sample 1Phuong Nguyen MinhNo ratings yet
- Communication Theory SampleDocument12 pagesCommunication Theory SampleManoj1508AravindNo ratings yet
- Final Exam Computer Applications in Industry Sem 1 2022 2023 Index 1 SolutionsDocument8 pagesFinal Exam Computer Applications in Industry Sem 1 2022 2023 Index 1 SolutionsPhúc AnNo ratings yet
- Green University of Bangladesh: Department of Computer Science & EngineeringDocument7 pagesGreen University of Bangladesh: Department of Computer Science & EngineeringtonmoyNo ratings yet
- Green University of Bangladesh: Department of Computer Science & EngineeringDocument7 pagesGreen University of Bangladesh: Department of Computer Science & EngineeringalamgirNo ratings yet
- Energies 11 00120Document14 pagesEnergies 11 00120bangs34No ratings yet
- Course Title: Digital Signal Processing I Lab Course Code: EEE 314Document5 pagesCourse Title: Digital Signal Processing I Lab Course Code: EEE 314Mehedi HasanNo ratings yet
- B.tech (Evening) Curriculum MEDocument8 pagesB.tech (Evening) Curriculum MEnikhilasoknNo ratings yet
- Maths Assignments AnswersDocument11 pagesMaths Assignments AnswersChidananda CNo ratings yet
- Comparison Between PID and FOPID Controllers Based On Particle Swarm OptimizationDocument9 pagesComparison Between PID and FOPID Controllers Based On Particle Swarm OptimizationnileshsmateNo ratings yet
- Project Managemet Lecture FourDocument7 pagesProject Managemet Lecture FourMahmoud Abdelghafar ElhussienyNo ratings yet
- Mohamed Waleed Zaki AliDocument6 pagesMohamed Waleed Zaki AliAhmed WaleedNo ratings yet
- skf2133 Chapter2nDocument28 pagesskf2133 Chapter2nJosé Luis MasacheNo ratings yet
- Mechanical EngineeringDocument8 pagesMechanical EngineeringpremNo ratings yet
- An Efficient Approach For Solving The Linear and Nonlinear Integro Differential EquationDocument4 pagesAn Efficient Approach For Solving The Linear and Nonlinear Integro Differential EquationahteshamNo ratings yet
- University of Gujrat: Department of Management SciencesDocument13 pagesUniversity of Gujrat: Department of Management SciencesUmarNo ratings yet
- Assignment No 3: Q1) A Consumer Organization That Evaluates New Automobiles Customarily Reports The Number ofDocument3 pagesAssignment No 3: Q1) A Consumer Organization That Evaluates New Automobiles Customarily Reports The Number ofAeman NadeemNo ratings yet
- Assignment3.2 1Document2 pagesAssignment3.2 1Charan NuthalapatiNo ratings yet
- NCS21 - 04 - Lyapunov Stability - 01Document50 pagesNCS21 - 04 - Lyapunov Stability - 01zain khuramNo ratings yet
- BER and PB of Binary BasebandDocument4 pagesBER and PB of Binary Basebandzain khuramNo ratings yet
- NCS21 - 03 - Describing Function Analysis - 01Document10 pagesNCS21 - 03 - Describing Function Analysis - 01zain khuramNo ratings yet
- Attachment 1603120414Document1 pageAttachment 1603120414zain khuramNo ratings yet
- NCS21 - 03 - Describing Function Analysis - 03Document4 pagesNCS21 - 03 - Describing Function Analysis - 03zain khuramNo ratings yet
- NCS21 - 02 - Phase Plane Analysis of Nonlinear Systems - 01Document19 pagesNCS21 - 02 - Phase Plane Analysis of Nonlinear Systems - 01zain khuramNo ratings yet
- NCS21 - 03 - Describing Function Analysis - 04Document8 pagesNCS21 - 03 - Describing Function Analysis - 04zain khuramNo ratings yet
- Course Answer-BookletDocument3 pagesCourse Answer-Bookletzain khuramNo ratings yet
- NCS21 - 03 - Describing Function Analysis - 02Document8 pagesNCS21 - 03 - Describing Function Analysis - 02zain khuramNo ratings yet
- Pak Study QuizDocument5 pagesPak Study Quizzain khuramNo ratings yet
- Eng Problems 6qsDocument3 pagesEng Problems 6qszain khuramNo ratings yet
- ECE Practice Problems.1Document4 pagesECE Practice Problems.1zain khuramNo ratings yet
- Page To Be PrintedDocument1 pagePage To Be Printedzain khuramNo ratings yet
- NCS21 - 02 - Phase Plane Analysis of Nonlinear Systems - 03Document7 pagesNCS21 - 02 - Phase Plane Analysis of Nonlinear Systems - 03zain khuramNo ratings yet
- Chap 3 Fyp NewDocument16 pagesChap 3 Fyp Newzain khuramNo ratings yet
- (Lecture-27,28) Pak. Relation With India and China (Week-14.)Document4 pages(Lecture-27,28) Pak. Relation With India and China (Week-14.)zain khuramNo ratings yet
- EE201 CHP 3.2 W5L1 UpDocument15 pagesEE201 CHP 3.2 W5L1 Upzain khuramNo ratings yet
- Quiz 5Document1 pageQuiz 5zain khuramNo ratings yet
- Part 5Document1 pagePart 5zain khuramNo ratings yet
- Assignment 2 1Document3 pagesAssignment 2 1zain khuramNo ratings yet
- 151ELE313 AssignmentDocument4 pages151ELE313 Assignmentzain khuramNo ratings yet
- BE1603 - May Exam Paper - 2020-21Document8 pagesBE1603 - May Exam Paper - 2020-21zain khuramNo ratings yet
- EE201 CHP 3.1 W4L2 UpDocument14 pagesEE201 CHP 3.1 W4L2 Upzain khuramNo ratings yet
- Project 3Document3 pagesProject 3zain khuramNo ratings yet
- Jun 2, Doc 1Document1 pageJun 2, Doc 1zain khuramNo ratings yet
- Electrical Field ProjectDocument5 pagesElectrical Field Projectzain khuramNo ratings yet
- ECE251L Lab Final ExamDocument3 pagesECE251L Lab Final Examzain khuramNo ratings yet
- EE 306 ManualDocument55 pagesEE 306 Manualzain khuramNo ratings yet
- TaskDocument1 pageTaskzain khuramNo ratings yet