You might also like
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2From EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2No ratings yet
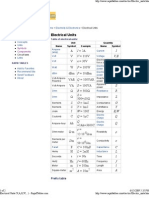
- Electrical Units Guide (V, A, Ω, WDocument2 pagesElectrical Units Guide (V, A, Ω, Wevtoma100% (1)
- Completo - Useful Electrical FormulasDocument3 pagesCompleto - Useful Electrical FormulasxerberoNo ratings yet
- Electronics Toolkit V103Document22 pagesElectronics Toolkit V103MuthuLakshmi RajendranNo ratings yet
- Seminar Aos Physics MR Hazeeq 16.12.2022Document19 pagesSeminar Aos Physics MR Hazeeq 16.12.2022NaziraNo ratings yet
- Ohms Law Formulas PDFDocument5 pagesOhms Law Formulas PDFAnonymous P1r2fMJ9No ratings yet
- Diagnostic Repair ManualDocument146 pagesDiagnostic Repair ManualANDROS MAYORALNo ratings yet
- Electric Power FormulasDocument53 pagesElectric Power Formulaskhialzada100% (5)
- ACFrOgAOlLizg2dYA88LzNwNikHVOcB6yIrAMkuXGBzCZmECOWCA6GL yMWbn8hvAYRwx6ZYrX-HIL0wU6ANGC6l0e3j3PDUNz2Ppa-C0VuW6avih7gTl3 T955F9wlM7fYRRjgF9iQ5X - fHzc1Document1 pageACFrOgAOlLizg2dYA88LzNwNikHVOcB6yIrAMkuXGBzCZmECOWCA6GL yMWbn8hvAYRwx6ZYrX-HIL0wU6ANGC6l0e3j3PDUNz2Ppa-C0VuW6avih7gTl3 T955F9wlM7fYRRjgF9iQ5X - fHzc1malanga.bangaNo ratings yet
- Air-Cooled Generator Repair Manual Models 04389 04758 04456 04759 04390 04760Document156 pagesAir-Cooled Generator Repair Manual Models 04389 04758 04456 04759 04390 04760Geoff Parker100% (1)
- Options:: Motor Formulas Transformer FormulasDocument3 pagesOptions:: Motor Formulas Transformer Formulasnagaraju_pepetiNo ratings yet
- Options: - Motor Formulas - Transformer Formulas E Voltage / I Amps /W Watts / PF Power Factor / Eff Efficiency / HP HorsepowerDocument3 pagesOptions: - Motor Formulas - Transformer Formulas E Voltage / I Amps /W Watts / PF Power Factor / Eff Efficiency / HP HorsepowerRajinikanth RenganathanNo ratings yet
- ElectricityDocument1 pageElectricitywakakkaNo ratings yet
- Physics For BMAT: Understand The Scope and Level of Challenge of BMAT Physics Questions Practice QuestionsDocument47 pagesPhysics For BMAT: Understand The Scope and Level of Challenge of BMAT Physics Questions Practice QuestionsRS123No ratings yet
- Single-Phase Transformers and AC Machines: Electric Power / ControlsDocument134 pagesSingle-Phase Transformers and AC Machines: Electric Power / ControlsIsrael AriasNo ratings yet
- Electrical ForumalsDocument69 pagesElectrical ForumalsZackNo ratings yet
- Single Phase Transformer TestDocument5 pagesSingle Phase Transformer TesthavejsnjNo ratings yet
- ASU-KALIBO IM - : Aklan State University College of Industrial Technology Kalibo, AklanDocument11 pagesASU-KALIBO IM - : Aklan State University College of Industrial Technology Kalibo, AklanAries PenalosaNo ratings yet
- EE310 M1 IntroductionDocument16 pagesEE310 M1 IntroductionAnthon ToledanoNo ratings yet
- Measuring Current with Shunts and AmmetersDocument6 pagesMeasuring Current with Shunts and AmmetersKeerthiSahaNo ratings yet
- Electrical FormulaDocument2 pagesElectrical FormulaNehra GauravNo ratings yet
- Basic Electrical FormulasDocument2 pagesBasic Electrical FormulasronniedakingpouNo ratings yet
- 2 Basic Laws of Physics and Electrical FormulasDocument2 pages2 Basic Laws of Physics and Electrical Formulaszane truesdaleNo ratings yet
- Unit of ElectricityDocument7 pagesUnit of Electricitysana.incubationNo ratings yet
- Generators Acapp 2nd1718 4Document19 pagesGenerators Acapp 2nd1718 4Anonymous uCjM4Q0% (2)
- LCA (Lecture 01) F-21 (Physical) Very Good ThingDocument9 pagesLCA (Lecture 01) F-21 (Physical) Very Good Thingahsan.shah7542No ratings yet
- Avionics Basic Formulas, Symbols - DefinitionsDocument20 pagesAvionics Basic Formulas, Symbols - DefinitionsDONG BUINo ratings yet
- Electrical Unit ConversionDocument4 pagesElectrical Unit ConversionAdelAlcebaiNo ratings yet
- OHMSLAWDocument33 pagesOHMSLAWAXL JOHN CEDRICK DEMATENo ratings yet
- Electricity Knowledge OrganiserDocument2 pagesElectricity Knowledge OrganiserJoel OkohNo ratings yet
- Standard Electrical Units of MeasureDocument3 pagesStandard Electrical Units of MeasureKuroKunaxNo ratings yet
- Electrical Forumals PDFDocument75 pagesElectrical Forumals PDFOscar Kelvin NsituNo ratings yet
- Diagnostic Repair ManualDocument151 pagesDiagnostic Repair Manualsu30mkii83gmail.com100% (2)
- AC Electricity Circuit AnalysisDocument21 pagesAC Electricity Circuit AnalysisJerome DesameroNo ratings yet
- Power Triangle DefinitionsDocument2 pagesPower Triangle Definitionsccorp00890% (1)
- Engineering Concepts and Methods - L2 - Electricity - Student - v3Document13 pagesEngineering Concepts and Methods - L2 - Electricity - Student - v3LoganP MayNo ratings yet
- Leroy-Somer Electrical Topics PDFDocument146 pagesLeroy-Somer Electrical Topics PDFIuri Braga100% (1)
- Electrical Fundamentals: DC Circuits and Resistance GlossaryDocument62 pagesElectrical Fundamentals: DC Circuits and Resistance GlossaryL Eru RoraitoNo ratings yet
- Seminar Aos Physics Friday MR Hazeeq 16.12.2022 - Ameerul HazeeqDocument22 pagesSeminar Aos Physics Friday MR Hazeeq 16.12.2022 - Ameerul HazeeqJihan Fahira 4S3No ratings yet
- Three-Phase Transformers and AC Machines Student ManualDocument150 pagesThree-Phase Transformers and AC Machines Student ManualLaertyNo ratings yet
- Three Phase Transformers and AC Machines Student ManualDocument150 pagesThree Phase Transformers and AC Machines Student ManualHeritashe MuskedNo ratings yet
- PP - Ohms LawDocument11 pagesPP - Ohms Lawrawrdisney78No ratings yet
- Ohm's Law: Electricity Parameters V, I, RDocument3 pagesOhm's Law: Electricity Parameters V, I, RRMK BrothersNo ratings yet
- Eformulae Mathematics Physics Chemistry Engineering ResourcesDocument3 pagesEformulae Mathematics Physics Chemistry Engineering Resourcessmile4ever54No ratings yet
- 2 Current ElectricityDocument17 pages2 Current ElectricityHimanshu GuptaNo ratings yet
- Electrical Formulas ExplanationsDocument16 pagesElectrical Formulas ExplanationsJShearer100% (24)
- C1-1 PH ckts-S1Document38 pagesC1-1 PH ckts-S1mhmd.akzrNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Rating: 3 out of 5 stars3/5 (2)
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1No ratings yet
- Abc of Capacitors: Basic PrinciplesFrom EverandAbc of Capacitors: Basic PrinciplesWürth ElektronikNo ratings yet
- Prelim Quiz 1 20Document16 pagesPrelim Quiz 1 20Simoun Angelo DimabogteNo ratings yet
- Franklin Vives. Frvito-030. NitroDocument12 pagesFranklin Vives. Frvito-030. NitroguilloNo ratings yet
- Biomechanics of Shooting A Free ThrowDocument20 pagesBiomechanics of Shooting A Free Throwapi-244839574No ratings yet
- Standards 7 8 9 10 Answer KeyDocument49 pagesStandards 7 8 9 10 Answer KeyHassanhor Guro BacolodNo ratings yet
- Science Form 1 - Chapter 3Document15 pagesScience Form 1 - Chapter 3Beevy GB71% (14)
- Impact Analysis of A Skull With and Without Helmet - SimScale PDFDocument6 pagesImpact Analysis of A Skull With and Without Helmet - SimScale PDFSooraj KrishnanNo ratings yet
- ECE 1109 - Electrical Properties of SolidDocument35 pagesECE 1109 - Electrical Properties of SolidIván RañaNo ratings yet
- Torsion Validation ShayanDocument10 pagesTorsion Validation ShayanGicuNo ratings yet
- ACE060 Laterally Loaded Piles ULS and SLS PDFDocument81 pagesACE060 Laterally Loaded Piles ULS and SLS PDFJoaquimNo ratings yet
- Transverse Shear 1Document48 pagesTransverse Shear 1Amira SyazanaNo ratings yet
- Rig Hydraulic ExercisesDocument8 pagesRig Hydraulic ExercisesShakerMahmood100% (2)
- Manning's Roughness Coefficient (N)Document11 pagesManning's Roughness Coefficient (N)Khurram MumtazNo ratings yet
- Design and Calculation AgitationDocument25 pagesDesign and Calculation Agitationibson045001256No ratings yet
- ch3 p01-50Document50 pagesch3 p01-50Jeanne JacksonNo ratings yet
- Lecture Note 03.2 Reponse Specturm AnalysisDocument8 pagesLecture Note 03.2 Reponse Specturm AnalysisPrasanna AbeysekaraNo ratings yet
- Comparative Analysis of A J Ack-Up Drilling U Nit With Different Leg SystemsDocument10 pagesComparative Analysis of A J Ack-Up Drilling U Nit With Different Leg SystemsengineeringyusufNo ratings yet
- 8 Types of Column Failure MethodsDocument5 pages8 Types of Column Failure MethodsSolomonNo ratings yet
- Overcenter Valves Regulate Hydraulic Actuator Movement for Safety and ControlDocument9 pagesOvercenter Valves Regulate Hydraulic Actuator Movement for Safety and Controlmr3478No ratings yet
- Friction DampersDocument10 pagesFriction DampersChetan B Arkasali100% (1)
- Fatigue Crack Initiation Point of Load Carrying Cruciform Joints in Low and High Cycle Fatigue RegionDocument6 pagesFatigue Crack Initiation Point of Load Carrying Cruciform Joints in Low and High Cycle Fatigue RegionNouman IqbalNo ratings yet
- EMTL Question PaperDocument2 pagesEMTL Question PaperJayaram Krishna100% (1)
- Elastic Properties of MatterDocument65 pagesElastic Properties of MatterBumpdustNo ratings yet
- ApplicationsDocument31 pagesApplicationsAsa KaNo ratings yet
- 03 Solution Assignment CEDocument28 pages03 Solution Assignment CERNo ratings yet
- 3488Document8 pages3488Dolly PriyaNo ratings yet
- 1 - Introduction To Steel Design PDFDocument9 pages1 - Introduction To Steel Design PDFNadine PascualNo ratings yet
- Roof Structural Analysis PDFDocument11 pagesRoof Structural Analysis PDFSaid Nour, PhD, PENo ratings yet
- Optimization of Torsional Stiffness For Heavy Commercial Vehicle Chassis FrameDocument11 pagesOptimization of Torsional Stiffness For Heavy Commercial Vehicle Chassis FrameMangesh YadavNo ratings yet
- GATEFLIX Chemical ThermodynamicsDocument119 pagesGATEFLIX Chemical ThermodynamicsVijaykumar JatothNo ratings yet
- Physical Science.. The Law of Physics Is UniversalDocument40 pagesPhysical Science.. The Law of Physics Is UniversalRangel pein mirandaNo ratings yet