You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Matrix Converter Reduces Effects of Wind Speed Fluctuations in PMSG Wind TurbinesDocument4 pagesMatrix Converter Reduces Effects of Wind Speed Fluctuations in PMSG Wind TurbinesChetan GhatageNo ratings yet
- Performance Improvement Using Matrix ConverDocument5 pagesPerformance Improvement Using Matrix ConverchetanNo ratings yet
- Grid Integration of Hybrid Renewable Energy System Using Versatile Matrix ConverterDocument6 pagesGrid Integration of Hybrid Renewable Energy System Using Versatile Matrix ConverterChetan GhatageNo ratings yet
- Fuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementDocument6 pagesFuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementChetan GhatageNo ratings yet
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDocument5 pagesApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDocument5 pagesApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Controller Design For A Wind Turbine System Including A Matrix ConverterDocument8 pagesController Design For A Wind Turbine System Including A Matrix ConverterChetan GhatageNo ratings yet
- Doubly-Fed Wind Turbine Mathematical Model and SimulationDocument3 pagesDoubly-Fed Wind Turbine Mathematical Model and SimulationChetan GhatageNo ratings yet
- Design of MATLAB - Simulink Modeling of Fixed-Pitch Angle Wind Turbine SimulatorDocument9 pagesDesign of MATLAB - Simulink Modeling of Fixed-Pitch Angle Wind Turbine SimulatorChetan GhatageNo ratings yet
- Wind Energy Conversion System Integrated With Grid Under Variable Speed ScenarioDocument12 pagesWind Energy Conversion System Integrated With Grid Under Variable Speed ScenarioVijay RajuNo ratings yet
- Control of Seven-To-Three Phase Direct Matrix Converter Using Model Predictive Control For Multiphase Wind GenerationDocument5 pagesControl of Seven-To-Three Phase Direct Matrix Converter Using Model Predictive Control For Multiphase Wind GenerationChetan GhatageNo ratings yet
- High Power Matrix Converter For Wind Power Generation ApplicationsDocument6 pagesHigh Power Matrix Converter For Wind Power Generation ApplicationsChetan GhatageNo ratings yet
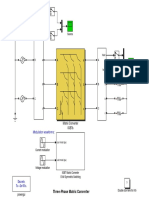
- Source: Thre e - Phase M Atrix Conv e Rte RDocument1 pageSource: Thre e - Phase M Atrix Conv e Rte RChetan GhatageNo ratings yet
- Fuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementDocument6 pagesFuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementChetan GhatageNo ratings yet
- Matrix Converter Reduces Effects of Wind Speed Fluctuations in PMSG Wind TurbinesDocument4 pagesMatrix Converter Reduces Effects of Wind Speed Fluctuations in PMSG Wind TurbinesChetan GhatageNo ratings yet
- Jamil2012 PDFDocument6 pagesJamil2012 PDFمحمد المهندسNo ratings yet
- Application of Matrix Converter For Variable Speed Wind Turbine Driving A Doubly Fed Induction GeneratorDocument5 pagesApplication of Matrix Converter For Variable Speed Wind Turbine Driving A Doubly Fed Induction GeneratorChetan GhatageNo ratings yet
- What Is Stability?: Stability Analysis in S-DomainDocument19 pagesWhat Is Stability?: Stability Analysis in S-DomainChetan GhatageNo ratings yet
- Wind Turbine Induction Generator (Phasor Type)Document5 pagesWind Turbine Induction Generator (Phasor Type)Chetan GhatageNo ratings yet
- Controller CircuitsDocument14 pagesController CircuitsChetan GhatageNo ratings yet
- Design of Matrix Converter in Windmill ForDocument7 pagesDesign of Matrix Converter in Windmill ForChetan GhatageNo ratings yet
- StaffingDocument14 pagesStaffingChetan GhatageNo ratings yet
- APPLICATION OF MATRIX CONVERTER IN WIND PMSGDocument8 pagesAPPLICATION OF MATRIX CONVERTER IN WIND PMSGChetan GhatageNo ratings yet
- Atmeg 32 DatasheetDocument19 pagesAtmeg 32 DatasheetChetan GhatageNo ratings yet
- Mini Project ListDocument2 pagesMini Project ListSandeep GorralaNo ratings yet
- Management and Entrepreneurship Important QuestionsDocument1 pageManagement and Entrepreneurship Important QuestionslambazNo ratings yet
- IES Syllabus For 2015Document10 pagesIES Syllabus For 2015rehenaparbinNo ratings yet
- M.Tech. - Industrial ElectronicsDocument6 pagesM.Tech. - Industrial ElectronicsManohar PundikalNo ratings yet
- Atmeg 32 DatasheetDocument19 pagesAtmeg 32 DatasheetChetan GhatageNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Wind Turbine Condition MonitoringDocument8 pagesWind Turbine Condition MonitoringLavanya ChandranNo ratings yet
- ABTP and GL Wind Turbine Flange Bolt SquirtersDocument3 pagesABTP and GL Wind Turbine Flange Bolt SquirtersJonathanGagliardiNo ratings yet
- Wind EnergyDocument27 pagesWind EnergyAnkush YadavNo ratings yet
- Suzlon EnergyDocument14 pagesSuzlon Energyjanhavi aryaNo ratings yet
- Numerical and Experimental Characterization of Multi-Stage Savonius RotorsDocument24 pagesNumerical and Experimental Characterization of Multi-Stage Savonius RotorsIkki AdjiNo ratings yet
- DTU Wind Energy Report I 46Document73 pagesDTU Wind Energy Report I 46hemal4379No ratings yet
- Wind Turbine Characteristics MATLAB CodeDocument9 pagesWind Turbine Characteristics MATLAB Coderkar-7No ratings yet
- Design Standard Offshore Wind Turbine Structures 2004Document8 pagesDesign Standard Offshore Wind Turbine Structures 2004Kenneth TanNo ratings yet
- IRENA Leveraging For Onshore Wind Executive Summary 2017Document28 pagesIRENA Leveraging For Onshore Wind Executive Summary 2017Donni Yanuar PurnomosunuNo ratings yet
- Vestas China Jyske BankDocument67 pagesVestas China Jyske BankmnpedersenNo ratings yet
- Wind Turbine Blade Analysis Using The Blade Element Momentum MethodDocument21 pagesWind Turbine Blade Analysis Using The Blade Element Momentum MethodcsmistryNo ratings yet
- Annual Energy Output From A Wind TurbineDocument2 pagesAnnual Energy Output From A Wind Turbineranjithkpvc100% (1)
- Winstroth 2014 J. Phys. Conf. Ser. 524 012064Document13 pagesWinstroth 2014 J. Phys. Conf. Ser. 524 012064Julliana Patrice Angeles STEM 11 RUBYNo ratings yet
- Offshore Wind FarmsDocument6 pagesOffshore Wind Farmsapi-345217277No ratings yet
- A Novel Based Wind/Solar Electric Vehicles For Green and Clean EnvironmentDocument9 pagesA Novel Based Wind/Solar Electric Vehicles For Green and Clean EnvironmentHuy Vũ GiaNo ratings yet
- Wind Solar Hybrid SystemDocument72 pagesWind Solar Hybrid SystemOdebunmi NathanielNo ratings yet
- Unit 3 BEEMDocument37 pagesUnit 3 BEEMkarthiNo ratings yet
- Wind Power PlantDocument64 pagesWind Power PlantKenneth GabrielNo ratings yet
- Unit 4 Multiple Choice Question Set ADocument10 pagesUnit 4 Multiple Choice Question Set Aabcd100% (2)
- Getting the Most from Your Wind GeneratorDocument11 pagesGetting the Most from Your Wind GeneratorD-SquaredNo ratings yet
- Wind Energy Harvesting: FIGURE 2.8 Power Coefficient Curve of A Wind TurbineDocument1 pageWind Energy Harvesting: FIGURE 2.8 Power Coefficient Curve of A Wind TurbineFuad AnwarNo ratings yet
- Guidelines Writing Vacation Employment ReportDocument8 pagesGuidelines Writing Vacation Employment ReportSonia MirandaNo ratings yet
- Revision 5Document426 pagesRevision 5Emmanuel BagonNo ratings yet
- UK XZERES Wind EuropeDocument12 pagesUK XZERES Wind EuropeLuis MansillaNo ratings yet
- WECSDocument26 pagesWECSVenkata Subramanian100% (1)
- The Development of A Fatigue Loading Spectrum For Small Wind Turbine BladesDocument17 pagesThe Development of A Fatigue Loading Spectrum For Small Wind Turbine BladesKhalil DeghoumNo ratings yet
- Renewable Energy Sources: Topic: Energy Scenario in India, Classification of Energy SourcesDocument41 pagesRenewable Energy Sources: Topic: Energy Scenario in India, Classification of Energy SourcesRup DevaNo ratings yet
- Project Certification of Offshore Wind Farms: DNV-OSS-901Document46 pagesProject Certification of Offshore Wind Farms: DNV-OSS-901Mohammed Abdul SayeedNo ratings yet
- Solutions For The Protection of Offshore Wind Farm CablingDocument6 pagesSolutions For The Protection of Offshore Wind Farm CablingJACK100% (1)
- 671AA-Final Report Offshore Electrical Cable Burial For Wind Farms PDFDocument220 pages671AA-Final Report Offshore Electrical Cable Burial For Wind Farms PDFnecmettinsengun50% (2)