You might also like
- Analytical and Experimental Evaluation of A WECS Based On A Cage Induction Generator Fed by A Matrix ConverterDocument12 pagesAnalytical and Experimental Evaluation of A WECS Based On A Cage Induction Generator Fed by A Matrix ConverterVipul PanchalNo ratings yet
- 3 Vol 3Document9 pages3 Vol 3emnt2007100% (2)
- Implementation of Sliding Mode Control System For Generator and Grid Sides Control of Wind Energy Conversion SystemDocument18 pagesImplementation of Sliding Mode Control System For Generator and Grid Sides Control of Wind Energy Conversion Systemhamza gaNo ratings yet
- Back-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesDocument8 pagesBack-To-Back Converter Design and Control For Synchronous Generator-Based Wind TurbinesBinh NgoNo ratings yet
- DocumentDocument16 pagesDocumentkurts010No ratings yet
- Ecotecnia 48 750 Variable-Speed Wind TurbineDocument4 pagesEcotecnia 48 750 Variable-Speed Wind TurbineMarcWorldNo ratings yet
- Design of A Brushless DC Permanent Magnet Generator For Use in Micro-Wind Turbine Applications - Preprint HALDocument11 pagesDesign of A Brushless DC Permanent Magnet Generator For Use in Micro-Wind Turbine Applications - Preprint HALGheorghe VasileNo ratings yet
- Matrix AdvantagesDocument14 pagesMatrix AdvantagesAdeline WinsterNo ratings yet
- Energy-Efficient Dynamic Drive Control For Wind Power Conversion With PMSG: Modeling and Application of Transfer Function AnalysisDocument12 pagesEnergy-Efficient Dynamic Drive Control For Wind Power Conversion With PMSG: Modeling and Application of Transfer Function Analysismalini72No ratings yet
- Matlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesDocument22 pagesMatlab Simulink As Simulation Tool For Wind Generation Systems Based On Doubly Fed Induction MachinesAchraf BourassNo ratings yet
- High-Efficiency Control For A Wind Energy Conversion System With Induction GeneratorDocument10 pagesHigh-Efficiency Control For A Wind Energy Conversion System With Induction GeneratorKIREETINo ratings yet
- Tuning of Control Loops For Grid Connected Voltage Source ConvertersDocument6 pagesTuning of Control Loops For Grid Connected Voltage Source ConvertersThiago Moura GalvãoNo ratings yet
- Improving The Performance of Integrated Power-Hardware-In-The-Loop and Quasi-Static Time-Series SimulationsDocument11 pagesImproving The Performance of Integrated Power-Hardware-In-The-Loop and Quasi-Static Time-Series Simulationsramya sreeNo ratings yet
- Performance Improvement of Alternators With SwitchDocument9 pagesPerformance Improvement of Alternators With SwitchfatihNo ratings yet
- DC Series Motor ControlDocument12 pagesDC Series Motor Controldapparao100% (1)
- Control of Grid Side Converter in Wind Power Based PMSG With PLL MethodDocument10 pagesControl of Grid Side Converter in Wind Power Based PMSG With PLL MethodItran AzalNo ratings yet
- DC Link Approach To Variable-Speed, Sensorless,: Induction Motor DriveDocument5 pagesDC Link Approach To Variable-Speed, Sensorless,: Induction Motor DrivesamirmansourNo ratings yet
- Influence of The Variable-Speed Wind Generators in Transient Stability Margin of The Conventional Generators Integrated in Electrical GridsDocument10 pagesInfluence of The Variable-Speed Wind Generators in Transient Stability Margin of The Conventional Generators Integrated in Electrical GridsMohamed TalebNo ratings yet
- Chapter - 6 Conclusion and Scope For Future WorkDocument4 pagesChapter - 6 Conclusion and Scope For Future WorkHamxa AmeerNo ratings yet
- Power Optimization and Control in Wind Energy Conversion Systems Using Extremum SeekingDocument12 pagesPower Optimization and Control in Wind Energy Conversion Systems Using Extremum SeekingVijay RajuNo ratings yet
- Electric Power Systems Research: Salvatore D'Arco, Jon Are Suul, Olav B. FossoDocument18 pagesElectric Power Systems Research: Salvatore D'Arco, Jon Are Suul, Olav B. Fossosureh32No ratings yet
- State Space Model of Grid Connected Inverters Under Current Control ModeDocument10 pagesState Space Model of Grid Connected Inverters Under Current Control Modeoussama sadkiNo ratings yet
- Fault Current Contribution From Synchronous Machine and Inverter Based DGDocument8 pagesFault Current Contribution From Synchronous Machine and Inverter Based DGabs1989No ratings yet
- Self Tuning Control of Wind Turbine Using Neural Network IdentifierDocument13 pagesSelf Tuning Control of Wind Turbine Using Neural Network IdentifierAlla SapronovaNo ratings yet
- Doubly-Fed Wind Turbine Mathematical Model and Simulation: 2014 International Symposium On Computer, Consumer and ControlDocument3 pagesDoubly-Fed Wind Turbine Mathematical Model and Simulation: 2014 International Symposium On Computer, Consumer and ControlSandeepKumarNo ratings yet
- General Model For Representing Variable Speed Wind Turbines in Power System Dynamics SimulationsDocument8 pagesGeneral Model For Representing Variable Speed Wind Turbines in Power System Dynamics SimulationsFilipe NunesNo ratings yet
- Impact of Large Offshore Wind Farms On Power System Transient StabilityDocument8 pagesImpact of Large Offshore Wind Farms On Power System Transient StabilityMadhusudhan SrinivasanNo ratings yet
- Improvement of Identification Procedure Using Hybrid Cuckoo Search Algorithm For Turbine-Governor and Excitation SystemDocument8 pagesImprovement of Identification Procedure Using Hybrid Cuckoo Search Algorithm For Turbine-Governor and Excitation SystemTeo TeoNo ratings yet
- Paper IJTEE2020Document8 pagesPaper IJTEE2020Djamila RekiouaNo ratings yet
- Base PaperDocument11 pagesBase PapersaiNo ratings yet
- Power Quality Detection in Distribution System With Wind Energy Penetration Using Discrete Wavelet TransformDocument6 pagesPower Quality Detection in Distribution System With Wind Energy Penetration Using Discrete Wavelet TransformDavid PerezNo ratings yet
- Cardenas (2001)Document11 pagesCardenas (2001)jhonatanNo ratings yet
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDocument5 pagesApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Paper 15Document13 pagesPaper 15RakeshconclaveNo ratings yet
- Ride-Through Analysis of Doubly Fed Induction Wind-Power Generator Under Unsymmetrical Network DisturbanceDocument8 pagesRide-Through Analysis of Doubly Fed Induction Wind-Power Generator Under Unsymmetrical Network DisturbanceDulal MannaNo ratings yet
- A MPPT Strategy Based On Cuckoo Search For Wind enDocument6 pagesA MPPT Strategy Based On Cuckoo Search For Wind enbensumbbNo ratings yet
- Aees P4Document5 pagesAees P4Profil FaksNo ratings yet
- IEEE Cicn Pamkaj AmitDocument6 pagesIEEE Cicn Pamkaj Amitamit vermaNo ratings yet
- Average and Small-Signal Modeling of Self-Oscillating Flyback Converter With Applied Switching DelayDocument8 pagesAverage and Small-Signal Modeling of Self-Oscillating Flyback Converter With Applied Switching DelayMohamed HaddadNo ratings yet
- Model Reference Adaptive Control For DC Motor Based On SimulinkDocument6 pagesModel Reference Adaptive Control For DC Motor Based On SimulinkJubei YanaikiNo ratings yet
- DFIGDocument9 pagesDFIGEngr Tahir Iqbal AwanNo ratings yet
- MATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GADocument10 pagesMATLAB/SIMULINK Based Model of Single-Machine Infinite-Bus With TCSC For Stability Studies and Tuning Employing GApragatinareshNo ratings yet
- MPC A Simple and Powerful Method To Control Power ConvertersDocument13 pagesMPC A Simple and Powerful Method To Control Power ConvertersDavidNo ratings yet
- Fuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementDocument6 pagesFuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementChetan GhatageNo ratings yet
- A Simple Efficient and Novel Standalone Photovoltaic Inverter Configuration With Reduced Harmonic DistortionDocument15 pagesA Simple Efficient and Novel Standalone Photovoltaic Inverter Configuration With Reduced Harmonic DistortionD SHOBHA RANINo ratings yet
- 01632521Document5 pages01632521Bruno Brondani TollerNo ratings yet
- 2008 Predictive Control Algorithm Technique For Multilevel Cascade InverterDocument9 pages2008 Predictive Control Algorithm Technique For Multilevel Cascade Inverterdaiduongxanh14113No ratings yet
- Ordered Synopsis CenthilDocument14 pagesOrdered Synopsis CenthilageesNo ratings yet
- Analysis and Validation of A Real-Time AC Drive Simulator, 2004.Document10 pagesAnalysis and Validation of A Real-Time AC Drive Simulator, 2004.Ali H. NumanNo ratings yet
- Modeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchDocument7 pagesModeling and Control of PMSG Based Variable Speed Wind Turbine 2010 Electric Power Systems ResearchRAJESHNo ratings yet
- A Comparative Study of Fuzzy Logic Controllers For Wind Turbine Based On PMSGDocument7 pagesA Comparative Study of Fuzzy Logic Controllers For Wind Turbine Based On PMSGHichem HamdiNo ratings yet
- Paper 3Document6 pagesPaper 3Aadit JeyasankarNo ratings yet
- Statcom ApplicationDocument5 pagesStatcom ApplicationJournalNX - a Multidisciplinary Peer Reviewed Journal100% (1)
- Improvement of Power System Transient Stability Using An Intelligent Control MethodDocument9 pagesImprovement of Power System Transient Stability Using An Intelligent Control MethodKhubaib AhmedNo ratings yet
- Design and Development of A Wind Turbine EmulatorDocument9 pagesDesign and Development of A Wind Turbine EmulatorhieuhuechNo ratings yet
- A Wind Turbine System Model Using A DoubDocument6 pagesA Wind Turbine System Model Using A DoubAnet JoseNo ratings yet
- Direct Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueDocument7 pagesDirect Torque Control For Induction Motor Using Intelligent Artificial Neural Network TechniqueInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Overcurrent Relay Advances for Modern Electricity NetworksFrom EverandOvercurrent Relay Advances for Modern Electricity NetworksNo ratings yet
- Design of MATLAB - Simulink Modeling of Fixed-Pitch Angle Wind Turbine SimulatorDocument9 pagesDesign of MATLAB - Simulink Modeling of Fixed-Pitch Angle Wind Turbine SimulatorChetan GhatageNo ratings yet
- Fuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementDocument6 pagesFuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementChetan GhatageNo ratings yet
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDocument5 pagesApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Performance Improvement Using Matrix ConverDocument5 pagesPerformance Improvement Using Matrix ConverchetanNo ratings yet
- Grid Integration of Hybrid Renewable Energy System Using Versatile Matrix ConverterDocument6 pagesGrid Integration of Hybrid Renewable Energy System Using Versatile Matrix ConverterChetan GhatageNo ratings yet
- Design and Implementation of Matrix Converter To Reduce The Effects of Wind Speed Fluctuations in PMSG Wind Turbine Generation SystemDocument4 pagesDesign and Implementation of Matrix Converter To Reduce The Effects of Wind Speed Fluctuations in PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Design and Implementation of Matrix Converter To Reduce The Effects of Wind Speed Fluctuations in PMSG Wind Turbine Generation SystemDocument4 pagesDesign and Implementation of Matrix Converter To Reduce The Effects of Wind Speed Fluctuations in PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Control of Seven-To-Three Phase Direct Matrix Converter Using Model Predictive Control For Multiphase Wind GenerationDocument5 pagesControl of Seven-To-Three Phase Direct Matrix Converter Using Model Predictive Control For Multiphase Wind GenerationChetan GhatageNo ratings yet
- Application of A Matrix Converter For PMSG Wind Turbine Generation SystemDocument5 pagesApplication of A Matrix Converter For PMSG Wind Turbine Generation SystemChetan GhatageNo ratings yet
- Fuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementDocument6 pagesFuzzy Logic Control of Matrix-Converter-Based WECS in Order To Performance ImprovementChetan GhatageNo ratings yet
- Doubly-Fed Wind Turbine Mathematical Model and SimulationDocument3 pagesDoubly-Fed Wind Turbine Mathematical Model and SimulationChetan GhatageNo ratings yet
- Mini Project ListDocument2 pagesMini Project ListSandeep GorralaNo ratings yet
- High Power Matrix Converter For Wind Power Generation ApplicationsDocument6 pagesHigh Power Matrix Converter For Wind Power Generation ApplicationsChetan GhatageNo ratings yet
- Application of Matrix Converter For Variable Speed Wind Turbine Driving A Doubly Fed Induction GeneratorDocument5 pagesApplication of Matrix Converter For Variable Speed Wind Turbine Driving A Doubly Fed Induction GeneratorChetan GhatageNo ratings yet
- Controller CircuitsDocument14 pagesController CircuitsChetan GhatageNo ratings yet
- Adaptive Nonlinear Maximum Power Point Tracker For A WECS Based On Permanent Magnet Synchronous Generator Fed by A Matrix ConverterDocument6 pagesAdaptive Nonlinear Maximum Power Point Tracker For A WECS Based On Permanent Magnet Synchronous Generator Fed by A Matrix ConverterChetan GhatageNo ratings yet
- Jamil2012 PDFDocument6 pagesJamil2012 PDFمحمد المهندسNo ratings yet
- Wind Turbine Induction Generator (Phasor Type)Document5 pagesWind Turbine Induction Generator (Phasor Type)Chetan GhatageNo ratings yet
- APPLICATION OF MATRIX CONVERTER IN WIND PMSGDocument8 pagesAPPLICATION OF MATRIX CONVERTER IN WIND PMSGChetan GhatageNo ratings yet
- Design of Matrix Converter in Windmill ForDocument7 pagesDesign of Matrix Converter in Windmill ForChetan GhatageNo ratings yet
- What Is Stability?: Stability Analysis in S-DomainDocument19 pagesWhat Is Stability?: Stability Analysis in S-DomainChetan GhatageNo ratings yet
- Management and Entrepreneurship Important QuestionsDocument1 pageManagement and Entrepreneurship Important QuestionslambazNo ratings yet
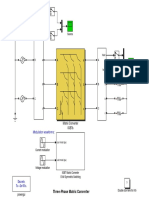
- Source: Thre e - Phase M Atrix Conv e Rte RDocument1 pageSource: Thre e - Phase M Atrix Conv e Rte RChetan GhatageNo ratings yet
- Wind Energy Conversion System Integrated With Grid Under Variable Speed ScenarioDocument12 pagesWind Energy Conversion System Integrated With Grid Under Variable Speed ScenarioVijay RajuNo ratings yet
- StaffingDocument14 pagesStaffingChetan GhatageNo ratings yet
- M.Tech. - Industrial ElectronicsDocument6 pagesM.Tech. - Industrial ElectronicsManohar PundikalNo ratings yet
- Atmeg 32 DatasheetDocument19 pagesAtmeg 32 DatasheetChetan GhatageNo ratings yet
- IES Syllabus For 2015Document10 pagesIES Syllabus For 2015rehenaparbinNo ratings yet
- Atmeg 32 DatasheetDocument19 pagesAtmeg 32 DatasheetChetan GhatageNo ratings yet
- Mathematics 8 Summative Test IIIDocument2 pagesMathematics 8 Summative Test IIIJunly Jeff NegapatanNo ratings yet
- CTSH - Technical Bulletin 97-1Document4 pagesCTSH - Technical Bulletin 97-1hesigu14No ratings yet
- ch-12 Herons FormulaDocument2 pagesch-12 Herons Formulaapi-286106888No ratings yet
- Technical PlacementDocument50 pagesTechnical PlacementSaumya SinghNo ratings yet
- Enforced ButtDocument2 pagesEnforced ButtSwati DhurpateNo ratings yet
- LOGIC - Immediate InferenceDocument32 pagesLOGIC - Immediate InferencePearl DomingoNo ratings yet
- AptiquestionDocument10 pagesAptiquestionKali DasNo ratings yet
- Numerical Methods in EconomicsDocument349 pagesNumerical Methods in EconomicsJuanfer Subirana Osuna0% (1)
- Math Standards Grade 6Document8 pagesMath Standards Grade 6truadminNo ratings yet
- Intro MUSSVDocument4 pagesIntro MUSSVMohammad Naser HashemniaNo ratings yet
- Module 2 Manpower LevelingDocument24 pagesModule 2 Manpower LevelingrandomstalkingwomenNo ratings yet
- Lebanese International University: CSCI 250 - Introduction To Programming - TEST-2: Student Name: Student IDDocument5 pagesLebanese International University: CSCI 250 - Introduction To Programming - TEST-2: Student Name: Student IDralf tamerNo ratings yet
- Chapter 2 Problem Analysis and DesignDocument35 pagesChapter 2 Problem Analysis and DesignWAN FAZLINI IDAYU BINTI WAN FAKARI - PKTNo ratings yet
- Determination of Temperature-Moisture Relationship by Linear Regression Models On Masonry and Floor, Kruja, AlbaniaDocument8 pagesDetermination of Temperature-Moisture Relationship by Linear Regression Models On Masonry and Floor, Kruja, AlbaniaPhD. Arch. Klodjan XhexhiNo ratings yet
- Tutorial 1Document3 pagesTutorial 1Manvendra TomarNo ratings yet
- SAMPLE - Shear Force and Bending Moment Influence LinesDocument39 pagesSAMPLE - Shear Force and Bending Moment Influence LinesSammi YongNo ratings yet
- Linear Systems With Generalized Linear Phase Systems With Linear Phase Generalized Linear PhaseDocument12 pagesLinear Systems With Generalized Linear Phase Systems With Linear Phase Generalized Linear PhaseAbdullah BilalNo ratings yet
- CBSE Class 12 Physics Alternating Current NotesDocument84 pagesCBSE Class 12 Physics Alternating Current NotesSanikaa MadhuNo ratings yet
- PHYSICS Matters For GCE O' Level Subject Code:5054: Unit 2: KinematicsDocument34 pagesPHYSICS Matters For GCE O' Level Subject Code:5054: Unit 2: KinematicsIqra ArshadNo ratings yet
- UTech CMP1025 Tutorial 3Document2 pagesUTech CMP1025 Tutorial 3Leia MichaelsonNo ratings yet
- Vedic MathsDocument8 pagesVedic Mathsnithin s gowda100% (1)
- Annuitization and The DARA HypothesisDocument29 pagesAnnuitization and The DARA HypothesisTomás Valenzuela TormNo ratings yet
- Object Oriented Programming Question BankDocument4 pagesObject Oriented Programming Question Bankvelmurugan_j100% (1)
- Advanced Marine Structures Prof. Dr. Srinivasan Chandrasekaran Department of Ocean Engineering Indian Institute of Technology, MadrasDocument20 pagesAdvanced Marine Structures Prof. Dr. Srinivasan Chandrasekaran Department of Ocean Engineering Indian Institute of Technology, MadrasmahakNo ratings yet
- Process ControlDocument57 pagesProcess Controlneerajtrip123No ratings yet
- Basic Simulation Modeling: The Nature of SimulationDocument18 pagesBasic Simulation Modeling: The Nature of SimulationlinhNo ratings yet
- Capillary Pressure Brooks and Corey Type CurveDocument12 pagesCapillary Pressure Brooks and Corey Type CurveSadiq KhanNo ratings yet
- EN Wind Code - Part2Document7 pagesEN Wind Code - Part2AJBAJB BAJBAJNo ratings yet
- Work, Energy, Power: Chapter 7 in A NutshellDocument31 pagesWork, Energy, Power: Chapter 7 in A NutshellArun Kumar AruchamyNo ratings yet
- Microstructure Invariance in U.S. Stock Market TradesDocument36 pagesMicrostructure Invariance in U.S. Stock Market TradesRolf ScheiderNo ratings yet