You might also like
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesFrom EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesNo ratings yet
- Santosh Mohan Rajkumar, Sayan Chakraborty, Rajeeb Dey, and Dipankar DebDocument12 pagesSantosh Mohan Rajkumar, Sayan Chakraborty, Rajeeb Dey, and Dipankar Debali coNo ratings yet
- Sciencedirect: B. Mohamed, R. Houria, E. TaharDocument6 pagesSciencedirect: B. Mohamed, R. Houria, E. TaharEng. Abdalla sheik Aden RaageNo ratings yet
- Distributed Large-Scale Co-Simulation For Iot-Aided Smart Grid ControlDocument10 pagesDistributed Large-Scale Co-Simulation For Iot-Aided Smart Grid ControldikyNo ratings yet
- Network Design Consideration For Distributed Control SystemsDocument11 pagesNetwork Design Consideration For Distributed Control SystemsyacobaschalewNo ratings yet
- Error Tracking Technique For System Stability in Lte Network Using Mixed Sensitivity TechniqueDocument14 pagesError Tracking Technique For System Stability in Lte Network Using Mixed Sensitivity TechniqueTJPRC PublicationsNo ratings yet
- Nicholas Kottenstette, Xenofon Koutsoukos Passivity-Based Design of Wireless Networked Control SystemsDocument17 pagesNicholas Kottenstette, Xenofon Koutsoukos Passivity-Based Design of Wireless Networked Control SystemsFelix GamarraNo ratings yet
- Chapter-1: Real-Time Scheduling With Security Enhancement For Packet Switched NetworksDocument65 pagesChapter-1: Real-Time Scheduling With Security Enhancement For Packet Switched NetworksIsmail TaralNo ratings yet
- Digital Pid Controller Design For Delayed Multivariable SystemsDocument13 pagesDigital Pid Controller Design For Delayed Multivariable SystemsssuthaaNo ratings yet
- 5G Iot PPTDocument10 pages5G Iot PPTmadhanakavimadhanakaviNo ratings yet
- A Low-Cost Cloud-Extended Sensor Network For Supervisory ControlDocument6 pagesA Low-Cost Cloud-Extended Sensor Network For Supervisory Controlatlasdz055No ratings yet
- RSRC TEL Making Substations PaperDocument9 pagesRSRC TEL Making Substations PaperCrit TandNo ratings yet
- Annual Reviews in Control: Dominique Sauter, Mohamed Amine Sid, Samir Aberkane, Didier MaquinDocument12 pagesAnnual Reviews in Control: Dominique Sauter, Mohamed Amine Sid, Samir Aberkane, Didier MaquinsidamineNo ratings yet
- Literature ReviewDocument6 pagesLiterature Reviewlalith vamsiNo ratings yet
- Information 12 00218Document16 pagesInformation 12 00218Nguyễn Hồng NhungNo ratings yet
- An Energy-Efficient Routing Protocol For The Internet of Things Networks Based On Geographical Location and Link QualityDocument13 pagesAn Energy-Efficient Routing Protocol For The Internet of Things Networks Based On Geographical Location and Link QualityHanaw BabashexNo ratings yet
- Clustering and Flow Monitoring for SDNsDocument23 pagesClustering and Flow Monitoring for SDNsAngel Nicolas Arotoma PraviaNo ratings yet
- 2018 BluDocument15 pages2018 BluMustafa MohammedNo ratings yet
- 3073-Article Text-12208-1-10-20230228Document7 pages3073-Article Text-12208-1-10-20230228Rekha SabojiNo ratings yet
- Network Topology Detection SystemDocument7 pagesNetwork Topology Detection SystemVishal KesharwaniNo ratings yet
- Modeling Distribution Automation Using IEC 61850Document6 pagesModeling Distribution Automation Using IEC 61850AlanMolinaNo ratings yet
- Design of Decoupled Pi Controllers For Two-Input Two-Output Networked Control Systems With Intrinsic and Network-Induced Time DelaysDocument8 pagesDesign of Decoupled Pi Controllers For Two-Input Two-Output Networked Control Systems With Intrinsic and Network-Induced Time DelaysAnuj ShahaneNo ratings yet
- ITSU3008 Project 1 Assignment 3 Systems Analysis Report: Submitted byDocument6 pagesITSU3008 Project 1 Assignment 3 Systems Analysis Report: Submitted byFarhanAshrafNo ratings yet
- Phase 2-FirstDocument22 pagesPhase 2-Firstgunjan26dNo ratings yet
- 14 Performance Analysis of Wired and Wireless LANDocument5 pages14 Performance Analysis of Wired and Wireless LANSigula Galuh0% (1)
- 307 1315 1 PB PDFDocument12 pages307 1315 1 PB PDFSunil KushwahaNo ratings yet
- 5G Iot PPTDocument10 pages5G Iot PPTmadhanakavimadhanakaviNo ratings yet
- Geese: A Traffic Generator: For Performance and Security Evaluation of IEC 61850 NetworksDocument6 pagesGeese: A Traffic Generator: For Performance and Security Evaluation of IEC 61850 NetworksAlemat TesfayNo ratings yet
- Slite Embedded Ieee 2010Document28 pagesSlite Embedded Ieee 2010ashvinrymond55No ratings yet
- Cwa-Ai Model To Control Network Delays For A-Gps Mobile Based Ad Hoc NetworksDocument12 pagesCwa-Ai Model To Control Network Delays For A-Gps Mobile Based Ad Hoc NetworksSudha MadhuriNo ratings yet
- Leonard I 2018Document15 pagesLeonard I 2018Abhishek P NairNo ratings yet
- 3 Energy FullDocument13 pages3 Energy FullTJPRC PublicationsNo ratings yet
- An Open Source Framework For Smart Meters: Data Communication and Security Traffic AnalysisDocument9 pagesAn Open Source Framework For Smart Meters: Data Communication and Security Traffic Analysisdan_intel6735No ratings yet
- Modular Handover Decision System Based On Fuzzy Logic For Wireless NetworksDocument4 pagesModular Handover Decision System Based On Fuzzy Logic For Wireless Networks游小德No ratings yet
- Design and Implementation of A Field ProgrammableDocument6 pagesDesign and Implementation of A Field ProgrammablesathyakalyanNo ratings yet
- Jurnal Proses ManufakturDocument6 pagesJurnal Proses ManufakturNur RokhimNo ratings yet
- Integrating Scada Load SheddingDocument9 pagesIntegrating Scada Load Sheddinganeesh100% (1)
- Efficient-Path Selection Scheme Using Optimized Adhoc On Demand Multipath Routing Protocol For Adhoc NetworksDocument9 pagesEfficient-Path Selection Scheme Using Optimized Adhoc On Demand Multipath Routing Protocol For Adhoc NetworksIJANANo ratings yet
- An Online Learning Approach To Computation Offloading in Dynamic Fog NetworksDocument13 pagesAn Online Learning Approach To Computation Offloading in Dynamic Fog NetworksMuhammad Atiq Ur Rehman 22-FET/PHDEE/S19No ratings yet
- Optimizing VNF Placement in VDC Using MLDocument9 pagesOptimizing VNF Placement in VDC Using MLffwdfwdwfNo ratings yet
- 5G-Based Transmission Power Control Mechanism in Fog Computing For Internet of Things DevicesDocument17 pages5G-Based Transmission Power Control Mechanism in Fog Computing For Internet of Things DevicesHamidreza MrtNo ratings yet
- Energies: Analysis of IEC 61850-9-2LE Measured Values Using A Neural NetworkDocument20 pagesEnergies: Analysis of IEC 61850-9-2LE Measured Values Using A Neural NetworkUdomsak ThanatkhaNo ratings yet
- Transfer Time Reduction in Lte Network For Improved Performance Using Mixed Sensitivity TechniqueDocument14 pagesTransfer Time Reduction in Lte Network For Improved Performance Using Mixed Sensitivity TechniqueTJPRC PublicationsNo ratings yet
- Wireless Network Clustering with Genetic AlgorithmsDocument5 pagesWireless Network Clustering with Genetic AlgorithmsMujeeb AbdullahNo ratings yet
- Paper 7Document4 pagesPaper 7AkshithaNo ratings yet
- Smart Grid Communication and Co-Simulation: Vincenzo Liberatore, Member, IEEE Computer, Ahmad Al-HammouriDocument5 pagesSmart Grid Communication and Co-Simulation: Vincenzo Liberatore, Member, IEEE Computer, Ahmad Al-HammouriLahcen AmiriNo ratings yet
- Dynamic Load Balancing Assisted Optimized Access ControlDocument15 pagesDynamic Load Balancing Assisted Optimized Access Controlmelazem rymNo ratings yet
- Remote PI Controller Tuning Case StudyDocument23 pagesRemote PI Controller Tuning Case StudyAnonymous WkbmWCa8MNo ratings yet
- Implementation of A Closed-Loop Structural Control System Using Wireless Sensor NetworksDocument23 pagesImplementation of A Closed-Loop Structural Control System Using Wireless Sensor NetworksAravind BhashyamNo ratings yet
- Blockchain Assisted Data Edge Verification With Consensus Algorithm For Machine Learning Assisted IoTDocument10 pagesBlockchain Assisted Data Edge Verification With Consensus Algorithm For Machine Learning Assisted IoTArunkumar MNo ratings yet
- Implementation of A Closed-Loop Structural Control System Using Wireless Sensor NetworksDocument23 pagesImplementation of A Closed-Loop Structural Control System Using Wireless Sensor Networksalex5566No ratings yet
- DEWA Automation PaperDocument27 pagesDEWA Automation PaperBruce CoxNo ratings yet
- Measure and Compare The Convergence Time of NetworDocument9 pagesMeasure and Compare The Convergence Time of NetworIrfan AkbarNo ratings yet
- Network Data Management in 5G Network For User Data Privacy - A SurveyDocument6 pagesNetwork Data Management in 5G Network For User Data Privacy - A SurveyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 2022 (001) - Low-Power Algorithm On GenericDocument7 pages2022 (001) - Low-Power Algorithm On GenericfsmondiolatiroNo ratings yet
- "Electricity Supply Monitoring and Billing Using Iot": AbstractDocument6 pages"Electricity Supply Monitoring and Billing Using Iot": AbstractVrushali GoreNo ratings yet
- Distributed Self-Healing and Variable Topology Optimization Algorithms For Qos Provisioning in ScatternetsDocument17 pagesDistributed Self-Healing and Variable Topology Optimization Algorithms For Qos Provisioning in ScatternetsGaurav SumanNo ratings yet
- City-Wide NB-IoT Network Monitoring and DiagnosingDocument14 pagesCity-Wide NB-IoT Network Monitoring and DiagnosingAbhishek kumar PankajNo ratings yet
- Latency Minimization GlobecomDocument6 pagesLatency Minimization GlobecomWESLEY GERALDO SAMPAIO DA NOBREGANo ratings yet
- Parallel FDTD Project Implements Electromagnetic Field SimulationDocument4 pagesParallel FDTD Project Implements Electromagnetic Field Simulationdiscos2001No ratings yet
- SerialDocument1 pageSerialMohamed RouaNo ratings yet
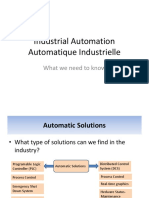
- Industrial Automation SolutionsDocument28 pagesIndustrial Automation SolutionsMohamed RouaNo ratings yet
- How To Add A New AQM Protocol in NS2Document7 pagesHow To Add A New AQM Protocol in NS2Mohamed RouaNo ratings yet
- Android Calculator SientificDocument2 pagesAndroid Calculator SientificMohamed RouaNo ratings yet
- Main ActivityDocument2 pagesMain ActivityCanche JoSueNo ratings yet
- Main ActivityDocument2 pagesMain ActivityCanche JoSueNo ratings yet
- Orakel DiplomDocument1 pageOrakel DiplomMohamed RouaNo ratings yet
- Close Uny ProgrameDocument3 pagesClose Uny ProgrameMohamed RouaNo ratings yet
- Java OdbcDocument1 pageJava OdbcMohamed RouaNo ratings yet
- Read All Texte in TextboxDocument1 pageRead All Texte in TextboxMohamed RouaNo ratings yet
- Learn How To Tell A JokeDocument1 pageLearn How To Tell A JokeMohamed RouaNo ratings yet
- Learn How To Tell A JokeDocument1 pageLearn How To Tell A JokeMohamed RouaNo ratings yet
- 23-24 Y12 IB Quiz 2Document16 pages23-24 Y12 IB Quiz 23414642747No ratings yet
- CS240 05 06 14Document20 pagesCS240 05 06 14ßryan LouNo ratings yet
- DNN-Based Smart Attendance SystemDocument18 pagesDNN-Based Smart Attendance SystemNaren DranNo ratings yet
- Di 09Document15 pagesDi 09Jefferson Paredes A.No ratings yet
- DE Using Laplace TransformDocument19 pagesDE Using Laplace TransformAllen CastorNo ratings yet
- Os Final Project VMDocument13 pagesOs Final Project VMikhwan salihinNo ratings yet
- Implicit Documentation: Release 0.4.4Document30 pagesImplicit Documentation: Release 0.4.4tangxiu fuNo ratings yet
- Optimal Binary Search TreeDocument21 pagesOptimal Binary Search TreeTahaRazviNo ratings yet
- Formal Language and Automata Solutions ManualDocument2 pagesFormal Language and Automata Solutions ManualEvelyn RM0% (2)
- Solving simultaneous equations graphicallyDocument4 pagesSolving simultaneous equations graphicallyElsa XuNo ratings yet
- Seminar 5 6 Answers1Document4 pagesSeminar 5 6 Answers1Mienh HaNo ratings yet
- Ks TrivediDocument5 pagesKs TrivediMonzieAir0% (4)
- Hidden Variables, The EM Algorithm, and Mixtures of GaussiansDocument58 pagesHidden Variables, The EM Algorithm, and Mixtures of GaussiansDUDEKULA VIDYASAGARNo ratings yet
- String Matching Introduction To NP-CompletenessDocument37 pagesString Matching Introduction To NP-Completeness20DCS009 DEVANSHI BHATTNo ratings yet
- COURSEFILEDocument45 pagesCOURSEFILEsiva 278No ratings yet
- Euler MethodDocument2 pagesEuler MethodTahreem TahoorNo ratings yet
- Apache Mahout: Demystifies How Anomaly Detection WorksDocument7 pagesApache Mahout: Demystifies How Anomaly Detection WorksNemo MarlinNo ratings yet
- CNS W2023-3161606Document2 pagesCNS W2023-3161606Archi JariwalaNo ratings yet
- The Applications of The Non-Linear Equations SysteDocument7 pagesThe Applications of The Non-Linear Equations Syste35. Vanes Angelo - XI IPA 5No ratings yet
- Calculus II-BA102 1st 2012-2013 - eDocument10 pagesCalculus II-BA102 1st 2012-2013 - eALI ELOUNYNo ratings yet
- Digital Signal Processing Lab task outputs and answersDocument18 pagesDigital Signal Processing Lab task outputs and answersMuhammad AnasNo ratings yet
- Teaching Plan For MSG456Document4 pagesTeaching Plan For MSG456dikkanNo ratings yet
- A Genetic Approach To Solving Sudoku SDocument26 pagesA Genetic Approach To Solving Sudoku SPrashant SoniNo ratings yet
- Advanced Analysis of AlgorithmsDocument22 pagesAdvanced Analysis of AlgorithmsHasham AkramNo ratings yet
- Entropy, Information, and Quantum EntanglementDocument17 pagesEntropy, Information, and Quantum EntanglementSrijit SanyalNo ratings yet
- Chapter 2-Part 4Document21 pagesChapter 2-Part 4Farah HaniNo ratings yet
- Android Malware Detection Based On Image AnalysisDocument6 pagesAndroid Malware Detection Based On Image AnalysisThanaa OdatNo ratings yet
- AnnuityDocument3 pagesAnnuitySharina Mhyca SamonteNo ratings yet
- Population in China - SolutionDocument8 pagesPopulation in China - SolutionZikai WangNo ratings yet
- 1b Query Optimization Sil 7ed ch16Document35 pages1b Query Optimization Sil 7ed ch16dharawagh17091991No ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- FTTx Networks: Technology Implementation and OperationFrom EverandFTTx Networks: Technology Implementation and OperationRating: 5 out of 5 stars5/5 (1)
- Practical TCP/IP and Ethernet Networking for IndustryFrom EverandPractical TCP/IP and Ethernet Networking for IndustryRating: 4 out of 5 stars4/5 (2)
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachFrom EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachRating: 4.5 out of 5 stars4.5/5 (3)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet