You might also like
- Wi-Fi EasyMesh Specification v3Document163 pagesWi-Fi EasyMesh Specification v3givangustavo100% (1)
- Msi Ms 7297 Manual PDFDocument2 pagesMsi Ms 7297 Manual PDFEduardo Pacheco100% (1)
- Labview+pulse Shaping and Matched FilteringDocument12 pagesLabview+pulse Shaping and Matched FilteringcarolmNo ratings yet
- Phase Relations in Active Filters PDFDocument5 pagesPhase Relations in Active Filters PDFbiswajitntpcNo ratings yet
- Matched Filtering TechniquesDocument19 pagesMatched Filtering TechniquesAssis FilhoNo ratings yet
- Sequential State-Space Filters For Speech EnhancementDocument4 pagesSequential State-Space Filters For Speech EnhancementMark MoralesNo ratings yet
- Constrained Least Square Design Filters Without Specified Transition BandsDocument14 pagesConstrained Least Square Design Filters Without Specified Transition Bandsmessi leoNo ratings yet
- Single-Sideband With Envelope Elimination and Restoration Single-Sideband TransmittersDocument7 pagesSingle-Sideband With Envelope Elimination and Restoration Single-Sideband Transmittersgaurav bhargavNo ratings yet
- Sallen Key Low Pass FilterDocument4 pagesSallen Key Low Pass FilterPhilip Caesar EbitNo ratings yet
- Enhancement of Speech Intelligibility and Quality in Hearing Aid Using Fast Adaptive Kalman Filter AlgorithmDocument13 pagesEnhancement of Speech Intelligibility and Quality in Hearing Aid Using Fast Adaptive Kalman Filter AlgorithmgauravNo ratings yet
- Bokeh Blur PDFDocument8 pagesBokeh Blur PDFVaibhav RanjithNo ratings yet
- FİltersDocument14 pagesFİltersprnddf2nvjNo ratings yet
- Mecha PDFDocument2 pagesMecha PDFMohammed AboalfotouhNo ratings yet
- Signal and Image Processing For Electromagnetic Testing: HapterDocument17 pagesSignal and Image Processing For Electromagnetic Testing: HapterKalai VananNo ratings yet
- Performance Analysis of Adaptive Noise Cancellation by Using AlgorithmsDocument7 pagesPerformance Analysis of Adaptive Noise Cancellation by Using Algorithmshaider aliNo ratings yet
- Adaptive FiltersDocument30 pagesAdaptive FiltersShyam Pratap SinghNo ratings yet
- Transmission de LingDocument7 pagesTransmission de Lingzakia zerroukiNo ratings yet
- Tutorial: Adaptive Filter, Acoustic Echo Canceller, and Its Low Power ImplementationDocument6 pagesTutorial: Adaptive Filter, Acoustic Echo Canceller, and Its Low Power ImplementationkmleongmyNo ratings yet
- Echo Cancellation Algorithms Using Adaptive Filters: A Comparative StudyDocument8 pagesEcho Cancellation Algorithms Using Adaptive Filters: A Comparative StudyidescitationNo ratings yet
- Improvement and Parameters Optimization of Washout Algorithm PDFDocument14 pagesImprovement and Parameters Optimization of Washout Algorithm PDFEmmanuelNo ratings yet
- Transient Distortion in Transistorized Power Amplifiers: AudioDocument6 pagesTransient Distortion in Transistorized Power Amplifiers: Audiogiordanobi859641No ratings yet
- A Variable Tap-Length Feedback Minimum Mean M-Estimate Adaptive Sub-Band Filtering Algorithm For Improved ANCDocument5 pagesA Variable Tap-Length Feedback Minimum Mean M-Estimate Adaptive Sub-Band Filtering Algorithm For Improved ANCAmbika Prasad ChandaNo ratings yet
- Version 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering AlgorithmsDocument7 pagesVersion 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering Algorithmstayyabkhan00No ratings yet
- Navid Lashkarian, Signal Processing Division, Xilinx Inc., San Jose, USA, Chris Dick, Signal Processing Division, Xilinx Inc., San Jose, USADocument6 pagesNavid Lashkarian, Signal Processing Division, Xilinx Inc., San Jose, USA, Chris Dick, Signal Processing Division, Xilinx Inc., San Jose, USASyed M. YaseenNo ratings yet
- PHY04Document1 pagePHY04ben harrisNo ratings yet
- Estimation of Total Jitter and Jitter Probability Density Function From The Signal SpectrumDocument7 pagesEstimation of Total Jitter and Jitter Probability Density Function From The Signal Spectrumgeodinger9316No ratings yet
- All Adaptive Filter AlgorithmsDocument9 pagesAll Adaptive Filter AlgorithmsAkilesh MDNo ratings yet
- Adaptive Filters: Angelina A. AquinoDocument2 pagesAdaptive Filters: Angelina A. AquinoAkinoTenshiNo ratings yet
- Roundof F-Noise Analysis Fixed-Point Digital Filters Realized in Cascade or ParallelDocument16 pagesRoundof F-Noise Analysis Fixed-Point Digital Filters Realized in Cascade or ParallelAthanasios MargarisNo ratings yet
- Noise Cancellation Using Adaptive Filter"Document5 pagesNoise Cancellation Using Adaptive Filter"kavita gangwarNo ratings yet
- Frequency Shifting For Acoustic Howling Suppression Templates For Dafx-08, Finland, FranceDocument4 pagesFrequency Shifting For Acoustic Howling Suppression Templates For Dafx-08, Finland, FranceMAURICIO LANDEROSNo ratings yet
- Adaptive Filter DesignDocument5 pagesAdaptive Filter DesignHariNathNo ratings yet
- Summary Wiener Filter: X (U, V) With The Wiener Filter G (U, V)Document33 pagesSummary Wiener Filter: X (U, V) With The Wiener Filter G (U, V)veenadorusNo ratings yet
- A Robust Baud Rate Estimator For Noncooperative Demodulation PDFDocument5 pagesA Robust Baud Rate Estimator For Noncooperative Demodulation PDFSorin GoldenbergNo ratings yet
- RF FilterDocument52 pagesRF FilterKeerthana PallerlaNo ratings yet
- Echo Cancellation in Audio Signal Using LMS Algorithm: Sanjay K. Nagendra Vinay Kumar.S.BDocument5 pagesEcho Cancellation in Audio Signal Using LMS Algorithm: Sanjay K. Nagendra Vinay Kumar.S.BPrabira Kumar SethyNo ratings yet
- Volterra Filters For Edge Enhancement: A General Framework For QuadraticDocument14 pagesVolterra Filters For Edge Enhancement: A General Framework For QuadraticmohammedmusthaffaaasNo ratings yet
- Active Noise Control: Open Problems and Challenges: July 2010Document7 pagesActive Noise Control: Open Problems and Challenges: July 2010Neamu ValentinNo ratings yet
- Anti-Aliasing Analog FiltersDocument12 pagesAnti-Aliasing Analog FiltersDocNo ratings yet
- A Review: Audio Noise Reduction and Various Techniques: Jashanpreet Kaur, Seema Baghla, Sunil KumarDocument4 pagesA Review: Audio Noise Reduction and Various Techniques: Jashanpreet Kaur, Seema Baghla, Sunil KumarMelaku DinkuNo ratings yet
- Lec 9Document2 pagesLec 9mpssassygirlNo ratings yet
- On-Line Tracking OF Time Varying Using: Harmonics AN Integrated Extended Complex Kalman Filter and Fourierlinear CombinerDocument6 pagesOn-Line Tracking OF Time Varying Using: Harmonics AN Integrated Extended Complex Kalman Filter and Fourierlinear CombinerFabien CallodNo ratings yet
- Speech Enhancement Using Kalman FilterDocument14 pagesSpeech Enhancement Using Kalman FilterTharunNo ratings yet
- UNIT-5 Review of Probability and Random ProcessDocument21 pagesUNIT-5 Review of Probability and Random ProcessAkshat MehrotraNo ratings yet
- New Acoustic Echo PPTVBHJNDocument30 pagesNew Acoustic Echo PPTVBHJNFatima TayyabaNo ratings yet
- A Basic Introduction To Filters, Active, Passive, and Switched CapacitorDocument22 pagesA Basic Introduction To Filters, Active, Passive, and Switched CapacitorheadupNo ratings yet
- Wavelet Based Feature Extraction For Phoneme RecognitionDocument4 pagesWavelet Based Feature Extraction For Phoneme RecognitionAshish KNo ratings yet
- Adaptive Notch GainDocument10 pagesAdaptive Notch GainDebajyoti DattaNo ratings yet
- Kalman Filter Implemented in The XA Eases Sensory Fusion: Integrated CircuitsDocument10 pagesKalman Filter Implemented in The XA Eases Sensory Fusion: Integrated CircuitshongphilongNo ratings yet
- Basic Processing - Definitions - Presentation - From - Xsgeo-Dot-Com - 1999Document9 pagesBasic Processing - Definitions - Presentation - From - Xsgeo-Dot-Com - 1999Muhammad BilalNo ratings yet
- Noise Cancellation in Speech SignalsDocument4 pagesNoise Cancellation in Speech SignalsandhahuNo ratings yet
- UKF PaperDocument5 pagesUKF Papertys7524No ratings yet
- Digital FIR Filter Design Using Evolutionary OptimizationDocument2 pagesDigital FIR Filter Design Using Evolutionary OptimizationaparnaNo ratings yet
- Using Kalman Filter To Reduce and Estimate Type A Uncertainties in Sinusoidal SignalsDocument5 pagesUsing Kalman Filter To Reduce and Estimate Type A Uncertainties in Sinusoidal SignalsLEDNo ratings yet
- Project Doc1234Document60 pagesProject Doc1234Eric AndersonNo ratings yet
- Theory of Active Noise ControlDocument8 pagesTheory of Active Noise ControlaytacerdNo ratings yet
- Discussions On Covariance Matrix of Kalman Filter For Power System Harmonic AnalysisDocument4 pagesDiscussions On Covariance Matrix of Kalman Filter For Power System Harmonic AnalysisFabien CallodNo ratings yet
- Adaptive Filter: Enhancing Computer Vision Through Adaptive FilteringFrom EverandAdaptive Filter: Enhancing Computer Vision Through Adaptive FilteringNo ratings yet
- Some Case Studies on Signal, Audio and Image Processing Using MatlabFrom EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- The Distributed Flight Array: Design, Implementation, and Analysis of A Modular Vertical Take-Off and Landing VehicleDocument26 pagesThe Distributed Flight Array: Design, Implementation, and Analysis of A Modular Vertical Take-Off and Landing VehicleSwee King PhangNo ratings yet
- Continuous On-Board Monocular-Vision-based Elevation Mapping - ICRA15 - ForsterDocument8 pagesContinuous On-Board Monocular-Vision-based Elevation Mapping - ICRA15 - ForsterSwee King PhangNo ratings yet
- Autonomous, Vision-Based Flight and Live Dense 3DDocument20 pagesAutonomous, Vision-Based Flight and Live Dense 3DSwee King PhangNo ratings yet
- 2008-Farrell-Aided Navigation-GPS With High Rate Sensors-Kalman - Faq - ErrataDocument27 pages2008-Farrell-Aided Navigation-GPS With High Rate Sensors-Kalman - Faq - ErrataSwee King PhangNo ratings yet
- FILE 20210113 151059 Vdocuments - Site 01-Ua5000-Technical-Manual PDFDocument107 pagesFILE 20210113 151059 Vdocuments - Site 01-Ua5000-Technical-Manual PDFThanh LeNo ratings yet
- I Ibmi RPG Support PDFDocument12 pagesI Ibmi RPG Support PDFJorge JimenezNo ratings yet
- Installing Executable-Image GEMPACK Prior To Laptop-Based CourseDocument6 pagesInstalling Executable-Image GEMPACK Prior To Laptop-Based CourseSigit WaskithoNo ratings yet
- Sample ObjectiveDocument5 pagesSample ObjectiveAssini HussainNo ratings yet
- DWR-M960 Datasheet IDNDocument4 pagesDWR-M960 Datasheet IDNkusuma 5773No ratings yet
- MT LowLevelCommunicationProtocol DocumentationDocument64 pagesMT LowLevelCommunicationProtocol Documentationsiddhartha1994No ratings yet
- Lecture 8 Angle ModulationDocument57 pagesLecture 8 Angle ModulationAwais khanNo ratings yet
- ACTIVITY 4 Without Shortest PathDocument3 pagesACTIVITY 4 Without Shortest PathRyan Ivan Capili CruzNo ratings yet
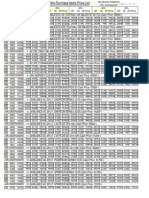
- PriceListHirePurchase Normal3august2020Document69 pagesPriceListHirePurchase Normal3august2020waqar ahmadNo ratings yet
- CHAPTER 1: Introduction: 1.1 MotivationDocument5 pagesCHAPTER 1: Introduction: 1.1 MotivationLabonno ProvaNo ratings yet
- Week 04 Flow Control in PythonDocument23 pagesWeek 04 Flow Control in PythonAnura DissanayakeNo ratings yet
- TCS Serverless ComputingDocument8 pagesTCS Serverless ComputingXxSnowDragon PlayzzxXNo ratings yet
- Course OutlineDocument3 pagesCourse OutlineAli Hassan RizviNo ratings yet
- Garmin Streetpilot III Manual: Print and OnlineDocument5 pagesGarmin Streetpilot III Manual: Print and OnlineBvm BvmmNo ratings yet
- Specifications Dimension: (Unit: MM) 55SVH7EDocument1 pageSpecifications Dimension: (Unit: MM) 55SVH7Edervis quinteroNo ratings yet
- History of PLCDocument18 pagesHistory of PLCAlex100% (1)
- DN Product Card DN Series 100D FA 2 20190423Document2 pagesDN Product Card DN Series 100D FA 2 20190423Adeng Kesuma H100% (1)
- Seminar 571Document28 pagesSeminar 571vangalabhanupriyaNo ratings yet
- ComputerDocument5 pagesComputerParidhi AgrawalNo ratings yet
- B.Tech IV Year I Semester (R15) Supplementary Examinations June/July 2019Document2 pagesB.Tech IV Year I Semester (R15) Supplementary Examinations June/July 2019saiNo ratings yet
- FTE Qualified Switch Firmware VersionsDocument15 pagesFTE Qualified Switch Firmware VersionsDani FayçalNo ratings yet
- Modify Your SAP Database Table Maintenance Events, Screen, Interface and CodeDocument2 pagesModify Your SAP Database Table Maintenance Events, Screen, Interface and CodeShivani DeshmukhNo ratings yet
- Oscillator BasicsDocument20 pagesOscillator BasicsRizGust Anunnaki100% (1)
- PCB Design Using PCB WizardDocument21 pagesPCB Design Using PCB WizardDeepak Goyal100% (3)
- V7i3 1579Document4 pagesV7i3 1579Ankitha ShettyNo ratings yet
- Cs ch5 File HandellingDocument14 pagesCs ch5 File HandellingShivamNo ratings yet
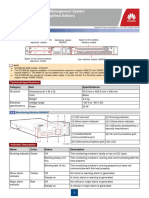
- SCC800-B2 SmartSite Management System Installation Guide (Simplified Edition)Document9 pagesSCC800-B2 SmartSite Management System Installation Guide (Simplified Edition)Hamza OsamaNo ratings yet
- Vbug PDFDocument244 pagesVbug PDFatmelloNo ratings yet