You might also like
- SmartAir Master Training ManualDocument39 pagesSmartAir Master Training ManualJesus Christ100% (3)
- Associate Cloud Engineer DumpDocument6 pagesAssociate Cloud Engineer DumpJohn KhuvruqNo ratings yet
- CSC 211 L - OS LabDocument81 pagesCSC 211 L - OS LabMuhammad AhmadNo ratings yet
- Parameters Which Effect Real and Reactive Power Flow: I I E X+ZDocument12 pagesParameters Which Effect Real and Reactive Power Flow: I I E X+ZvenkatNo ratings yet
- Controlled Rectifier Single Phase Full WaveDocument7 pagesControlled Rectifier Single Phase Full WaveJesus BecerraNo ratings yet
- Ee 331 Design - Servo MotorDocument5 pagesEe 331 Design - Servo MotorLa-Pierre O'MeallyNo ratings yet
- Design of A Controller For A DC MotorDocument11 pagesDesign of A Controller For A DC Motormarcalomar19No ratings yet
- QA On Sync Gen1Document6 pagesQA On Sync Gen1Eugene Tan YhNo ratings yet
- ENSC 225 Operational Amplifier LabDocument15 pagesENSC 225 Operational Amplifier LabaaaaaaNo ratings yet
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Document11 pagesElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiency Lab2Joseph NguyenNo ratings yet
- AP Physics C - RC CircuitsDocument20 pagesAP Physics C - RC CircuitsnalinigeeNo ratings yet
- Exp3 2021Document11 pagesExp3 2021Priyanka kataria [IIT DELHI]No ratings yet
- Lic LabDocument15 pagesLic Labpratik kumarNo ratings yet
- Ac 1Document8 pagesAc 1engineer86No ratings yet
- Assignment - Unit 1Document2 pagesAssignment - Unit 1ApoorvaNo ratings yet
- Complex Power, Reactive Compensation, Three PhaseDocument31 pagesComplex Power, Reactive Compensation, Three Phaseahmah2009No ratings yet
- Antenna Azimuth Position Control SystemDocument29 pagesAntenna Azimuth Position Control SystemJunaid Iqbal81% (16)
- Eeol 2008dec01 Pow Ems Ta 01Document5 pagesEeol 2008dec01 Pow Ems Ta 01RDVNo ratings yet
- Lab Report 6Document14 pagesLab Report 6Ummu Umar Wa AisyahNo ratings yet
- Solving Differential Equation Using OPAMPDocument4 pagesSolving Differential Equation Using OPAMPRekhamtrNo ratings yet
- Chapter 11 AC ResonanceDocument20 pagesChapter 11 AC ResonanceErin LoveNo ratings yet
- Psa I 17ee62Document20 pagesPsa I 17ee62Shreyas KanabaragiNo ratings yet
- 6LABO Ganago Student Lab7Document27 pages6LABO Ganago Student Lab7Rocio Deidamia Puppi HerreraNo ratings yet
- Solns - 1 CmosDocument15 pagesSolns - 1 Cmosramprakash_rampelliNo ratings yet
- ExCoté - 121219 - SolutionDocument6 pagesExCoté - 121219 - Solutionnikko verquinNo ratings yet
- Com Lab ManualDocument59 pagesCom Lab ManualAngels N Queens100% (1)
- 2 in One LabDocument5 pages2 in One LabEnock KachokolaNo ratings yet
- Power System AnalysisDocument4 pagesPower System AnalysisnnkhanhvanNo ratings yet
- ELG3311: Solutions For Assignment 1: Problem 2-6Document14 pagesELG3311: Solutions For Assignment 1: Problem 2-6tesfayregs gebretsadik100% (1)
- EX. NO.:01 Date: Modelling of Solar PV Cell: 1 Pw5261 - Renewable LabDocument47 pagesEX. NO.:01 Date: Modelling of Solar PV Cell: 1 Pw5261 - Renewable Labmohana sundaramNo ratings yet
- CL-12 Chapter 4 Magnetism PhysicsDocument15 pagesCL-12 Chapter 4 Magnetism PhysicsSomila SchoolNo ratings yet
- Answers FinalDocument20 pagesAnswers FinalMario HanyNo ratings yet
- Op Amp TutorialDocument12 pagesOp Amp Tutorialavneesh_singhNo ratings yet
- Exp 1 Transfer Function of Armature Controlled DC MotorDocument7 pagesExp 1 Transfer Function of Armature Controlled DC MotorHardik Agravatt0% (1)
- EE 204 The Root Mean Square (RMS) Value: F TDT F TDocument14 pagesEE 204 The Root Mean Square (RMS) Value: F TDT F TAhmad WilcoxNo ratings yet
- Modern Physics Lab-DimuthuDocument20 pagesModern Physics Lab-DimuthuDimuthu ObeysekeraNo ratings yet
- Lab Report 1Document31 pagesLab Report 1Kristi GadeshiNo ratings yet
- CYCLOCONVERTERSDocument46 pagesCYCLOCONVERTERSHari Haran100% (1)
- 3 - Diode Rectifiers & RegulatorDocument6 pages3 - Diode Rectifiers & RegulatorHello WorldNo ratings yet
- Lab #2 Ac Measurements: EE 200 - Electronic Circuits ImplementationDocument8 pagesLab #2 Ac Measurements: EE 200 - Electronic Circuits ImplementationPoyraz EmelNo ratings yet
- HNEE 105 Electrical and Electronic PrincipleDocument31 pagesHNEE 105 Electrical and Electronic PrincipleShaikh FarhaNo ratings yet
- AS-74.4180 Automatic Modelling of Industrial Plants Using Semantic SpecificationsDocument24 pagesAS-74.4180 Automatic Modelling of Industrial Plants Using Semantic SpecificationsAram SimonianNo ratings yet
- Exp - No: Date: Power Flow Analysis by Newton-Raphson Method AimDocument72 pagesExp - No: Date: Power Flow Analysis by Newton-Raphson Method AimLakshmi ZaharaNo ratings yet
- DCS 01 (Dcspeed)Document16 pagesDCS 01 (Dcspeed)K PranavNo ratings yet
- Pcim 2012 MWDocument7 pagesPcim 2012 MWSoma GhoshNo ratings yet
- ECE4762011 Lect14Document46 pagesECE4762011 Lect14selvan90No ratings yet
- The Temperature Box: Introduction To The Control System ProjectDocument9 pagesThe Temperature Box: Introduction To The Control System ProjectKasshaf AhmadNo ratings yet
- Transient in RC and RL CircuitsDocument10 pagesTransient in RC and RL CircuitsHenok BelaynehNo ratings yet
- Practical Exam C++Document11 pagesPractical Exam C++Anonymous YnmCkRCNo ratings yet
- Operational Amplifier LAbDocument17 pagesOperational Amplifier LAbAhmad DboukNo ratings yet
- The Operational Amplifier in CommutationDocument6 pagesThe Operational Amplifier in CommutationJugurthaHadjarNo ratings yet
- Automatic Control Systems: Transfer FunctionsDocument23 pagesAutomatic Control Systems: Transfer FunctionsMU Len GANo ratings yet
- HSST Electronics Part3 Op Amp Based MultivibratorsDocument16 pagesHSST Electronics Part3 Op Amp Based MultivibratorsAliNo ratings yet
- Eee 2Document11 pagesEee 2Moses MushehenuNo ratings yet
- Laboratory Induction MotorsDocument17 pagesLaboratory Induction MotorsEsteban GilNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)From EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)No ratings yet
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Date October 8, 2019 Proponents Aquino, Iann Ivan Malabanan, Alyssa Faith D. Olaez, Germie A. Tuazon, Bryan ADocument2 pagesDate October 8, 2019 Proponents Aquino, Iann Ivan Malabanan, Alyssa Faith D. Olaez, Germie A. Tuazon, Bryan Aiann ivan aquiniNo ratings yet
- Computer Project FileDocument15 pagesComputer Project FileAbhinav Anand SinghNo ratings yet
- IBM Storage Modeller (StorM)Document13 pagesIBM Storage Modeller (StorM)fptnamNo ratings yet
- Noise Triange & Pre-Emphasis - De-Emphasis 2Document9 pagesNoise Triange & Pre-Emphasis - De-Emphasis 2Disha GoelNo ratings yet
- BCA Time Table 2016Document7 pagesBCA Time Table 2016KiranDevNo ratings yet
- DFT Interview QuestionsDocument2 pagesDFT Interview QuestionsSatish Mb100% (1)
- Fenves Stress A Reference Manual 1965 PDFDocument402 pagesFenves Stress A Reference Manual 1965 PDFAndrijanaNo ratings yet
- Irig Pro IO User ManualDocument14 pagesIrig Pro IO User ManualAnyelo Rojas CórdovaNo ratings yet
- Billimoria K Linux Kernel Debugging Leverage Proven Tools 2022Document639 pagesBillimoria K Linux Kernel Debugging Leverage Proven Tools 2022jose100% (2)
- RMANDocument32 pagesRMANvitu3075No ratings yet
- 1 GCP Cheatsheet CloudDocument3 pages1 GCP Cheatsheet CloudPrakhar JainNo ratings yet
- Number Systems TopicDocument9 pagesNumber Systems TopicHeybaejuliaNo ratings yet
- Basic Processing UnitDocument49 pagesBasic Processing UnitritikNo ratings yet
- JVC SX-DW303 subwooferDocument25 pagesJVC SX-DW303 subwooferlasser22832165No ratings yet
- (Notified On 15/06/2010) COMEDK UGET 2010-2011Document69 pages(Notified On 15/06/2010) COMEDK UGET 2010-2011Lokesh KumarNo ratings yet
- LSJ175 To-92Document1 pageLSJ175 To-92Wael TawfikNo ratings yet
- Transistor BJT - 3Document56 pagesTransistor BJT - 3Sinta reinaNo ratings yet
- FL17 ParametersDocument1,286 pagesFL17 ParametersChristian JoundaNo ratings yet
- Simple Flip Flop CircuitDocument13 pagesSimple Flip Flop CircuitWilson Jesus Rojas BayonaNo ratings yet
- Gaussian Minimum Shift KeyingDocument52 pagesGaussian Minimum Shift KeyingMohamed EltahanNo ratings yet
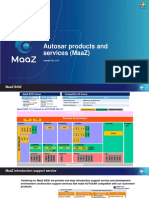
- Autosar Products and Services (Maaz) : SoftwareDocument12 pagesAutosar Products and Services (Maaz) : Softwarethanhmaikmt123456No ratings yet
- Chapter Three: Client-Side Scripting (Javascript)Document76 pagesChapter Three: Client-Side Scripting (Javascript)Danny KirooNo ratings yet
- Operating Systems (R16 Iii B.Tech I Sem) Unit - IiDocument17 pagesOperating Systems (R16 Iii B.Tech I Sem) Unit - IiRajeswaranaidu DarsiNo ratings yet
- Icse 2023 - 861 CtaDocument8 pagesIcse 2023 - 861 Ctashauryasahu2004No ratings yet
- Delays VerilogDocument18 pagesDelays VerilogAkhilesh SinghNo ratings yet
- Plans To Build Powered Radionic Devices Using RF and LM386 AmpsDocument2 pagesPlans To Build Powered Radionic Devices Using RF and LM386 Ampssuso73100% (3)
- Jenkins - Fundamentals - CloudBeesDocument14 pagesJenkins - Fundamentals - CloudBeesGOPI CNo ratings yet