You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Week15 PDEDocument29 pagesWeek15 PDEPENERBIT ZENITSNo ratings yet
- MIT2 29S15 Lecture10Document26 pagesMIT2 29S15 Lecture10Ihab OmarNo ratings yet
- Partial Differential EquationsDocument45 pagesPartial Differential EquationssafaatNo ratings yet
- Numerical Methods For Pdes: Spring 2007Document35 pagesNumerical Methods For Pdes: Spring 2007MartinI.IseckNo ratings yet
- Chapter 1 (First Order - 17)Document37 pagesChapter 1 (First Order - 17)Nuraddeen MagajiNo ratings yet
- 9 PDEs PDFDocument60 pages9 PDEs PDFIvan DujlovicNo ratings yet
- Chapter 1 (First Order)Document43 pagesChapter 1 (First Order)EmmanuelNo ratings yet
- Linearity of The Schrödinger Equation: Linearity in ! (X, T) : A Linear Combination ! (X, T) of Two Solutions !Document4 pagesLinearity of The Schrödinger Equation: Linearity in ! (X, T) : A Linear Combination ! (X, T) of Two Solutions !Ranojit barmanNo ratings yet
- Diffeq PDFDocument4 pagesDiffeq PDFGhenoiu PaulNo ratings yet
- NUMERICAL SOLUTION TO DIFFERENTIAL EQUATION OF THE FORM: y'' − (log (x) sin^α (x^β) ) ' y' + x^ (γ+sin^α (x^β) ) y = 0Document20 pagesNUMERICAL SOLUTION TO DIFFERENTIAL EQUATION OF THE FORM: y'' − (log (x) sin^α (x^β) ) ' y' + x^ (γ+sin^α (x^β) ) y = 0Jhonn Royero BarrazaNo ratings yet
- Non Linear Finite Element MethodDocument54 pagesNon Linear Finite Element MethodBENALLANo ratings yet
- Finite Difference Method For PDEDocument93 pagesFinite Difference Method For PDEyelinelif1993No ratings yet
- Partial Differential EquationDocument39 pagesPartial Differential EquationTaimoor AliNo ratings yet
- Drift Diffusion ModelingDocument84 pagesDrift Diffusion ModelingMrDOTNo ratings yet
- Classification of Partial Classification of Partial Differential Differential Equations Equations.Document8 pagesClassification of Partial Classification of Partial Differential Differential Equations Equations.Topan SetiadipuraNo ratings yet
- GEG 402 Slides of Numerical Analysis of Ordinary Differential Equations 3Document54 pagesGEG 402 Slides of Numerical Analysis of Ordinary Differential Equations 3Benedict HounsinouNo ratings yet
- Lecture Notes, Revised, PDEsm, M, M, MM, M, MDocument12 pagesLecture Notes, Revised, PDEsm, M, M, MM, M, Mabdul5721No ratings yet
- Math: 2107: Partial Differential Equations (Pdes)Document25 pagesMath: 2107: Partial Differential Equations (Pdes)RafeulNo ratings yet
- AEM-Chapter03-higher Order Linear Diff EqDocument71 pagesAEM-Chapter03-higher Order Linear Diff EqAchmad Fauzi100% (1)
- ProblemsDocument5 pagesProblemsparasNo ratings yet
- Partial Differential EquationsDocument18 pagesPartial Differential EquationsRohit Kalsi100% (1)
- Lec7 Numerical ModelDocument58 pagesLec7 Numerical ModelNoorLiana MahmudNo ratings yet
- Ma1512 Cheatsheet Summary Differential Equations For EngineeringDocument4 pagesMa1512 Cheatsheet Summary Differential Equations For EngineeringDennis SorianoNo ratings yet
- Numerical Solution of Ordinary Differential Equations: Dr. Abdul Muis, ST - Meng. Dr. Ir. Feri Yusivar MengDocument24 pagesNumerical Solution of Ordinary Differential Equations: Dr. Abdul Muis, ST - Meng. Dr. Ir. Feri Yusivar MengListiNo ratings yet
- MANE 4240 & CIVL 4240 Introduction To Finite ElementsDocument15 pagesMANE 4240 & CIVL 4240 Introduction To Finite ElementsMarvinEboraNo ratings yet
- Cauchy-Euler Equation: Higher-Order Differential EquationsDocument7 pagesCauchy-Euler Equation: Higher-Order Differential EquationsDanial AliNo ratings yet
- MAE563 1D Weighted Residual MethodDocument10 pagesMAE563 1D Weighted Residual Methodchesspalace2No ratings yet
- 10 1 1 754 2142Document15 pages10 1 1 754 2142David SenjayaNo ratings yet
- N S P D E: Umerical Olution OF Artial Ifferential QuationsDocument55 pagesN S P D E: Umerical Olution OF Artial Ifferential QuationsMohamed Muayid100% (1)
- Probabilistic Structural Dynamics Methods ComparedDocument39 pagesProbabilistic Structural Dynamics Methods Comparedejzuppelli8036No ratings yet
- Differential Equations: Also Known As Engineering Analysis or EngianaDocument66 pagesDifferential Equations: Also Known As Engineering Analysis or EngianaPatrice Pauline TamoriaNo ratings yet
- Linear and Non-Linear Systems AnalysisDocument29 pagesLinear and Non-Linear Systems AnalysisRupalNo ratings yet
- 3.1.Solutions-First Order ODEs-Separable MethodDocument6 pages3.1.Solutions-First Order ODEs-Separable MethodReginald AshongNo ratings yet
- MIT5 73F18 Lec1Document10 pagesMIT5 73F18 Lec1Faradila DanisNo ratings yet
- Lecture 22: Introduction To Log-Linear Models: Dipankar Bandyopadhyay, PH.DDocument59 pagesLecture 22: Introduction To Log-Linear Models: Dipankar Bandyopadhyay, PH.DRodrigo Fonseca de CarvalhoNo ratings yet
- Pde PDFDocument49 pagesPde PDFsachin guptaNo ratings yet
- jaac-14-4-2441Document25 pagesjaac-14-4-2441Vadel SniperNo ratings yet
- Doi: 10.5565/publmat 60116 01Document24 pagesDoi: 10.5565/publmat 60116 01Frank EstupiñanNo ratings yet
- B1c283a8 E24c 4b88 8311 Bea2813bc8eDocument16 pagesB1c283a8 E24c 4b88 8311 Bea2813bc8eGaurav KhalaseNo ratings yet
- Finite Element Methods: Dr. Muhammad FarhanDocument15 pagesFinite Element Methods: Dr. Muhammad FarhanHafiz AbdulrehmanNo ratings yet
- Chapter 1- Differential Equations (Part 3)Document65 pagesChapter 1- Differential Equations (Part 3)Naym MiaNo ratings yet
- First-Order Differential Equations: S.-Y. Leu Sept. 28, 2005Document21 pagesFirst-Order Differential Equations: S.-Y. Leu Sept. 28, 2005Poornima SNo ratings yet
- Alternative Solution of The Inhomogeneous Linear Differential Equation of Order Two - Johnson, BusawonDocument8 pagesAlternative Solution of The Inhomogeneous Linear Differential Equation of Order Two - Johnson, BusawonJesús Avalos RodríguezNo ratings yet
- A Study of An Analytic Solution of 1D Heat Equation: April 21, 2019Document31 pagesA Study of An Analytic Solution of 1D Heat Equation: April 21, 2019manikandanNo ratings yet
- Partial Differential EquationsDocument42 pagesPartial Differential EquationsPragya ChakshooNo ratings yet
- Structural Analysis FEM Lecture 6 Method of Weighted ResidualsDocument10 pagesStructural Analysis FEM Lecture 6 Method of Weighted ResidualsPaul RichardsNo ratings yet
- Boundary Value Problems in Spherical Coordinates: Y. K. GohDocument45 pagesBoundary Value Problems in Spherical Coordinates: Y. K. GohPopescu Viorel-MihaiNo ratings yet
- Chapter 12: Partial Differential EquationsDocument11 pagesChapter 12: Partial Differential EquationsDark bOYNo ratings yet
- WEEK 7 Numerical Integration ODE EU RK and IBVDocument79 pagesWEEK 7 Numerical Integration ODE EU RK and IBVDemas Jati100% (1)
- Toward The Theory of Semi-Linear Equations: Vladimir Gutlyanski I, Olga Nesmelova, Vladimir RyazanovDocument35 pagesToward The Theory of Semi-Linear Equations: Vladimir Gutlyanski I, Olga Nesmelova, Vladimir Ryazanovhuevonomar05No ratings yet
- CFD Prof Analyzes Fluid Flow PDEsDocument52 pagesCFD Prof Analyzes Fluid Flow PDEsAhmed AlsabaaNo ratings yet
- Pde Slides0Document16 pagesPde Slides0ranya.baevaNo ratings yet
- Spectral Methods in CFD: Fourier and Chebyshev MethodsDocument12 pagesSpectral Methods in CFD: Fourier and Chebyshev MethodsMarc Rovira SacieNo ratings yet
- Class XII-Differential EquationDocument38 pagesClass XII-Differential EquationPoornima SNo ratings yet
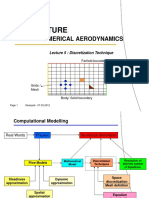
- AE 4012 Aerodinamika Numerik-Lecture5 Discretization TechniqueDocument28 pagesAE 4012 Aerodinamika Numerik-Lecture5 Discretization TechniqueDaniel TanNo ratings yet
- Existence, Uniqueness and Asymptotic Behaviour For Fractional Porous Medium Equations On Bounded DomainsDocument43 pagesExistence, Uniqueness and Asymptotic Behaviour For Fractional Porous Medium Equations On Bounded Domainsshihomasami14No ratings yet
- Chapter 12Document40 pagesChapter 12인천사람No ratings yet
- Lecture 08 - Particles in 1D BoxDocument30 pagesLecture 08 - Particles in 1D BoxArc Zero100% (1)
- PART I: Ordinary Differential EquationsDocument5 pagesPART I: Ordinary Differential EquationsBhupi.SamNo ratings yet
- Strain Gauge Installation Examples PDFDocument5 pagesStrain Gauge Installation Examples PDFWandyy GonçalvesNo ratings yet
- Developing 1-Dimensional Transient Heat Transfer Axi-Symmetric MMDocument30 pagesDeveloping 1-Dimensional Transient Heat Transfer Axi-Symmetric MMVesa RäisänenNo ratings yet
- Time Integration Methods for Solving the Heat EquationDocument10 pagesTime Integration Methods for Solving the Heat EquationVesa Räisänen100% (1)
- Indo German Winter Academy 2010: Multigrid MethodsDocument40 pagesIndo German Winter Academy 2010: Multigrid MethodsVesa RäisänenNo ratings yet
- Cylinder Drag ExperimentDocument111 pagesCylinder Drag ExperimentVesa RäisänenNo ratings yet
- Selecting A Strain Gage Based On Operating Temperatures and Other Measuring Conditions PDFDocument12 pagesSelecting A Strain Gage Based On Operating Temperatures and Other Measuring Conditions PDFVesa Räisänen0% (1)
- Pitot Airspeed-V3 PDFDocument4 pagesPitot Airspeed-V3 PDFGus Gus GusNo ratings yet
- Instruction Manual For The Airspeed MicroSensor V3 PDFDocument4 pagesInstruction Manual For The Airspeed MicroSensor V3 PDFVesa RäisänenNo ratings yet
- Dynfluid BULTRANS Dobrev 2014Document6 pagesDynfluid BULTRANS Dobrev 2014Vesa RäisänenNo ratings yet
- UoD CME Lab DAQ SystemDocument34 pagesUoD CME Lab DAQ SystemVesa RäisänenNo ratings yet
- Aerodinamica Do Efeito SoloDocument12 pagesAerodinamica Do Efeito SoloRogerio GuahyNo ratings yet
- Preliminary Datasheet SDP3x-AnalogDocument9 pagesPreliminary Datasheet SDP3x-AnalogVesa RäisänenNo ratings yet
- Compression Strength of Composite Primary Structural ComponentsDocument12 pagesCompression Strength of Composite Primary Structural ComponentsVesa RäisänenNo ratings yet
- Wig CraftDocument88 pagesWig CraftVesa RäisänenNo ratings yet
- HexTow HM63 FlyerDocument2 pagesHexTow HM63 FlyerVesa RäisänenNo ratings yet
- COMPOSITE WING OPTIMALIZATION USING FEM ANALYSES SYSTEMS by Miroslav Spišák - Peter MalatinDocument3 pagesCOMPOSITE WING OPTIMALIZATION USING FEM ANALYSES SYSTEMS by Miroslav Spišák - Peter MalatinVesa RäisänenNo ratings yet
- Aerodinamica Do Efeito SoloDocument12 pagesAerodinamica Do Efeito SoloRogerio GuahyNo ratings yet
- National Advisory Committee For AeronauticsDocument23 pagesNational Advisory Committee For AeronauticsWellcome_13No ratings yet
- Simplified Design Procedures For Fiber Composite Structural CompositesDocument24 pagesSimplified Design Procedures For Fiber Composite Structural CompositesVesa RäisänenNo ratings yet
- Mil A 8870CDocument52 pagesMil A 8870CVesa RäisänenNo ratings yet
- The Use of High Stiffness Material and Dimensionally Stable Materials in Spacecraft Applications by David Bashford Et Al.Document11 pagesThe Use of High Stiffness Material and Dimensionally Stable Materials in Spacecraft Applications by David Bashford Et Al.Vesa RäisänenNo ratings yet
- ECSS E HB 32 20 - Part2A PDFDocument434 pagesECSS E HB 32 20 - Part2A PDFVesa RäisänenNo ratings yet
- Effect of Ribs and Stringer Spacings On The Weight of Composite StructuresDocument7 pagesEffect of Ribs and Stringer Spacings On The Weight of Composite StructuresVesa RäisänenNo ratings yet
- The Desing of Airplane Wing RibsDocument50 pagesThe Desing of Airplane Wing RibsVesa RäisänenNo ratings yet
- NASA/TP-2009-215778: Simple Formulas for Buckling Resistance and Stiffness of Composite CylindersDocument55 pagesNASA/TP-2009-215778: Simple Formulas for Buckling Resistance and Stiffness of Composite CylindersVesa RäisänenNo ratings yet
- A Symmary of Diagonal Tension Part 1 Methods and AnalysisDocument137 pagesA Symmary of Diagonal Tension Part 1 Methods and AnalysisVesa RäisänenNo ratings yet
- Naca-Report-82 Airplane Stress Analysis 1928 PDFDocument74 pagesNaca-Report-82 Airplane Stress Analysis 1928 PDFVesa RäisänenNo ratings yet
- MATS MiningSyllabus PDFDocument83 pagesMATS MiningSyllabus PDFaufal RiswanNo ratings yet
- Mathematics-II Study MaterialDocument156 pagesMathematics-II Study MaterialNitendra KumarNo ratings yet
- High Voltage Lecture - 8Document33 pagesHigh Voltage Lecture - 8Mansoor SarwarNo ratings yet
- Follicle RX Review - Advanced Hair Growth Formula Health BenefitsDocument3 pagesFollicle RX Review - Advanced Hair Growth Formula Health BenefitsCleanse CleanseNo ratings yet
- (Andrew John Sommese, Charles W. Wampler II, Charl, MatlabDocument423 pages(Andrew John Sommese, Charles W. Wampler II, Charl, Matlabمعتز جبار فهدNo ratings yet
- B SC - II-10Document84 pagesB SC - II-10vishal jamnekarNo ratings yet
- Bike Renting PDFDocument26 pagesBike Renting PDFShubham RajNo ratings yet
- Jackson 2 13 Homework SolutionDocument5 pagesJackson 2 13 Homework SolutionJardel da RosaNo ratings yet
- Maths Quest Specialist 12 Textbook 4E TI-Nspire CAS CompanionDocument96 pagesMaths Quest Specialist 12 Textbook 4E TI-Nspire CAS CompanionVinny Lam86% (7)
- Design of Axis Symmetric NozzleDocument127 pagesDesign of Axis Symmetric NozzleSanjay KumarNo ratings yet
- Problem Solving Strategy PDFDocument2 pagesProblem Solving Strategy PDFJosé LemusNo ratings yet
- Numerical Methods in Economics PDFDocument349 pagesNumerical Methods in Economics PDFHenry CisnerosNo ratings yet
- Bukit Mertajam 2013 M1 (Q&A)Document4 pagesBukit Mertajam 2013 M1 (Q&A)STPMmathsNo ratings yet
- Evaluate Homework and Practice AnswersDocument4 pagesEvaluate Homework and Practice Answersafeupzvkx100% (1)
- Year 9 MATHEMATICSDocument153 pagesYear 9 MATHEMATICSCindy InternetNo ratings yet
- SPM Add Maths Pass Year QuestionsDocument61 pagesSPM Add Maths Pass Year QuestionsAvvy21No ratings yet
- Zero Product PropertyDocument3 pagesZero Product PropertyKevin HolcombNo ratings yet
- 1.1 One-Step EquationsDocument6 pages1.1 One-Step EquationsDeanNo ratings yet
- maths bansal complexDocument16 pagesmaths bansal complexAaNo ratings yet
- Mark Scheme (Results) June 2013: GCE Core Mathematics 4 (6666/01)Document28 pagesMark Scheme (Results) June 2013: GCE Core Mathematics 4 (6666/01)Abdulrahman JijawiNo ratings yet
- Pinakafinal Exam Math 9 1Document4 pagesPinakafinal Exam Math 9 1Royce Dunhill Fortes Domondon100% (1)
- Mathematics: Key Notes Terms Definitions FormulaeDocument463 pagesMathematics: Key Notes Terms Definitions FormulaeSoumik Karmakar88% (8)
- 6 Exam Paper - IB HL - Separable Differential EquationsDocument19 pages6 Exam Paper - IB HL - Separable Differential EquationsYang WangNo ratings yet
- Fiitjee: Syllabus All India Nternal Test Series Class - Xii AI TS - 4Document18 pagesFiitjee: Syllabus All India Nternal Test Series Class - Xii AI TS - 4Rishabh D'SouzaNo ratings yet
- Instant Download Ebook PDF Foundation Maths 7th Edition PDF ScribdDocument41 pagesInstant Download Ebook PDF Foundation Maths 7th Edition PDF Scribdjudith.haley157100% (40)
- Birla Institute of Technology & Science, Pilani Course Handout Part A: Content DesignDocument11 pagesBirla Institute of Technology & Science, Pilani Course Handout Part A: Content DesignRitesh PrakashNo ratings yet
- Revision Exercise II No. 1: Solve The Following Equations: 3 (2 1) 7 8 (7 ) (3 1)Document8 pagesRevision Exercise II No. 1: Solve The Following Equations: 3 (2 1) 7 8 (7 ) (3 1)Abdulkasim AkhmedovNo ratings yet
- Ug New Codes 2017Document18 pagesUg New Codes 2017Dinesh GdkNo ratings yet
- Lean Angle MotorcycleDocument10 pagesLean Angle MotorcycleGabriel NunesNo ratings yet
- ODE Simulink PDFDocument92 pagesODE Simulink PDFcristianNo ratings yet