You might also like
- DSPIC30f2010 C Code SanjayDocument16 pagesDSPIC30f2010 C Code SanjayMian Fahim75% (8)
- OSINT Handbook 2020Document510 pagesOSINT Handbook 2020Lougan75% (4)
- Riso RP Series Technical ManualDocument536 pagesRiso RP Series Technical ManualromicaNo ratings yet
- TIA EIA 568 B.2 1finalDocument86 pagesTIA EIA 568 B.2 1finalFábio TrindadeNo ratings yet
- Code Robot Hut Bui ArduinoDocument14 pagesCode Robot Hut Bui Arduinotrung phamNo ratings yet
- Arduino Code for Controlling DC Motors and Servo with BluetoothDocument3 pagesArduino Code for Controlling DC Motors and Servo with BluetoothKbVennelaNo ratings yet
- RobotDocument5 pagesRobotAbdessamad GabbadiNo ratings yet
- Arduino CodeDocument3 pagesArduino CodeMohammedNo ratings yet
- CIRCUITO Sensor Ultrasonido Prender SEIS LedDocument3 pagesCIRCUITO Sensor Ultrasonido Prender SEIS Led0000No ratings yet
- Simulation of Rotating TriangleDocument18 pagesSimulation of Rotating TriangleBhagwan BhosleNo ratings yet
- ARDUINODocument17 pagesARDUINOFredy Andres Torres NavaNo ratings yet
- Code Dieu KhienDocument8 pagesCode Dieu KhienHau VoNo ratings yet
- Nama: Cakra Rizky Fortuna NRP: 0920040020 KLS: To3A: EAS Praktikum Mikroprosesor Dan MikrokontrolerDocument13 pagesNama: Cakra Rizky Fortuna NRP: 0920040020 KLS: To3A: EAS Praktikum Mikroprosesor Dan MikrokontrolercaktotNo ratings yet
- MikroİşlemcilerDocument27 pagesMikroİşlemcilerBumin CengizNo ratings yet
- Project CodeDocument13 pagesProject CodedeepikaNo ratings yet
- Untitled DocumentDocument5 pagesUntitled Documentpushpak84shindeNo ratings yet
- GRAPHICSOUTPUTDocument12 pagesGRAPHICSOUTPUTrenukadevik633No ratings yet
- Obstacle Avoiding Robot Arduino Code-1 PDFDocument5 pagesObstacle Avoiding Robot Arduino Code-1 PDFRaj AryanNo ratings yet
- Arduino Obstacle Avoiding RobotDocument5 pagesArduino Obstacle Avoiding RobotWalt WhimpennyNo ratings yet
- Xe Tu HanhDocument4 pagesXe Tu HanhPhát ThànhNo ratings yet
- UntitledDocument6 pagesUntitledMark christian LacapNo ratings yet
- Practical 5 To 10Document17 pagesPractical 5 To 10viraj bhoirNo ratings yet
- Code Bánh XeDocument2 pagesCode Bánh XeimhuyyyyNo ratings yet
- Archery Game (Source Code)Document19 pagesArchery Game (Source Code)Nurul KhairunnisaNo ratings yet
- Arduino Traffic Light Controller with 3 SignalsDocument4 pagesArduino Traffic Light Controller with 3 Signalsdespicable meNo ratings yet
- Pwmpin Motorspeed : SetupDocument3 pagesPwmpin Motorspeed : SetupVISHNU VISHNU935No ratings yet
- Void SetupDocument29 pagesVoid SetupAlejandro RojasNo ratings yet
- โค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างDocument4 pagesโค้ดหุ่นยนต์จ้าวความเร็วโค้ดตัวอย่างธวัชชัย ตรีศูนย์No ratings yet
- IncludeDocument2 pagesIncludeDra GoenNo ratings yet
- C++ Snake Game Experiment with Graphics FunctionsDocument27 pagesC++ Snake Game Experiment with Graphics FunctionsEttu americanNo ratings yet
- ความเร็วทดลองDocument4 pagesความเร็วทดลองธวัชชัย ตรีศูนย์No ratings yet
- Analyze Four CiphertextsDocument156 pagesAnalyze Four CiphertextsRudraharaNo ratings yet
- UntitledDocument16 pagesUntitledMark christian LacapNo ratings yet
- ArduinoDocument8 pagesArduinoNurul Husna IliynNo ratings yet
- Project Code 2Document3 pagesProject Code 2despicable meNo ratings yet
- Ball BouncingDocument19 pagesBall BouncingSarath S NairNo ratings yet
- Lingaya's Vidyapeeth, Faridabad: Lab ManualDocument32 pagesLingaya's Vidyapeeth, Faridabad: Lab ManualEntertainment KingNo ratings yet
- CODE XE DÒ LINE TRÁNH VẬT CẢN PDFDocument12 pagesCODE XE DÒ LINE TRÁNH VẬT CẢN PDFgiangNo ratings yet
- 7 Segment DisplayDocument30 pages7 Segment DisplayEyedel MehNo ratings yet
- SOUCRCECODEDocument26 pagesSOUCRCECODEKushal PatilNo ratings yet
- #Include #Include #Include #Include #Define PT 1 #Define STROKE 2 #Define END 3Document14 pages#Include #Include #Include #Include #Define PT 1 #Define STROKE 2 #Define END 3Putra KanostraNo ratings yet
- MCSL-054 (II) Solved AssignmentDocument11 pagesMCSL-054 (II) Solved AssignmentRajni KumariNo ratings yet
- 9 LED pattern Arduino projectDocument5 pages9 LED pattern Arduino projectjerbie darundayNo ratings yet
- Write A Program in C To Draw Line ClippingDocument4 pagesWrite A Program in C To Draw Line ClippingDILEEP KUMARNo ratings yet
- AGV Project Codes CompilationDocument15 pagesAGV Project Codes CompilationJhasper ManagyoNo ratings yet
- Drone Obstacle Avoidance Code-2Document5 pagesDrone Obstacle Avoidance Code-2Ajay YadavNo ratings yet
- Intraday Trading StrategyDocument5 pagesIntraday Trading StrategyPragnesh ShahNo ratings yet
- Pizzle GameDocument4 pagesPizzle GameAung TikeNo ratings yet
- ControlDocument5 pagesControlOmar AymanNo ratings yet
- Lab Manual Gor Computer Graphics and MultimediaDocument18 pagesLab Manual Gor Computer Graphics and MultimediakartikeyNo ratings yet
- Implement the Huffman Coding algorithmDocument4 pagesImplement the Huffman Coding algorithm2K20MC69 Kartik GuptaNo ratings yet
- OpenGL Animated CirclesDocument2 pagesOpenGL Animated CirclesVishnuNo ratings yet
- Programer RobotDocument3 pagesProgramer RobotSofia CollectionNo ratings yet
- Implement On A Data Set of Characters The Three CRC PolynomialsDocument26 pagesImplement On A Data Set of Characters The Three CRC PolynomialsSlim ShadyNo ratings yet
- AbcdDocument25 pagesAbcdkissmeusuallyNo ratings yet
- Quadratic equation solver and roots calculatorDocument11 pagesQuadratic equation solver and roots calculatorVũ VinhNo ratings yet
- AdfghsDocument2 pagesAdfghsTrisha HillNo ratings yet
- LL1 Parser Implementation in CDocument6 pagesLL1 Parser Implementation in CvermaNo ratings yet
- SuperTrend Indicator refined codeDocument9 pagesSuperTrend Indicator refined codeanil singhNo ratings yet
- Walsh Matrix Algorithm ImplementationDocument19 pagesWalsh Matrix Algorithm ImplementationAmar TrappedNo ratings yet
- Arduino Code for Motion Detection and AlertDocument8 pagesArduino Code for Motion Detection and AlertbtmsNo ratings yet
- CD Exp9,10Document6 pagesCD Exp9,10sushilbajpai2003No ratings yet
- E-Commerce Website Using Mern StackDocument6 pagesE-Commerce Website Using Mern StackprathamNo ratings yet
- 2007-2008 NEW Electrical Engineering TitlesDocument40 pages2007-2008 NEW Electrical Engineering Titlesmeenakshi sharmaNo ratings yet
- CipherTrust Manager - Hands-On - CTM Database Protection (CDP)Document25 pagesCipherTrust Manager - Hands-On - CTM Database Protection (CDP)bertinNo ratings yet
- Learn JavaScript - Functions Cheatsheet - CodecademyDocument3 pagesLearn JavaScript - Functions Cheatsheet - CodecademyIliasAhmedNo ratings yet
- DSE 6010-6020-ManualDocument62 pagesDSE 6010-6020-ManualVadimNo ratings yet
- Learning PHP, Part 1Document35 pagesLearning PHP, Part 1PauloNo ratings yet
- Assignment 2: Software Verification and ValidationDocument3 pagesAssignment 2: Software Verification and ValidationMuhammad IrfanNo ratings yet
- Datasheet of DS D5B55RB B Conference Flat Panel 20210917Document5 pagesDatasheet of DS D5B55RB B Conference Flat Panel 20210917Aziz Thierry COMPAORENo ratings yet
- FqwaecsDocument2 pagesFqwaecsMohamed SelimNo ratings yet
- Sismógrafo GEA24 - PASIDocument3 pagesSismógrafo GEA24 - PASIkevin arnold espinoza venturaNo ratings yet
- A High-Throughput and Power-Efficient FPGA Implementation of Yolo CNN For Object DetectionDocument13 pagesA High-Throughput and Power-Efficient FPGA Implementation of Yolo CNN For Object DetectionVinh Lê HữuNo ratings yet
- Final Report AcerDocument69 pagesFinal Report AcerSandeep Parkhe0% (1)
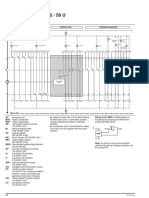
- Wiring Diagrams STR 18 M / 28 D / 38 S / 58 U: Masterpact: ConnectionDocument21 pagesWiring Diagrams STR 18 M / 28 D / 38 S / 58 U: Masterpact: ConnectionSidali KilardjNo ratings yet
- Các Phím Tắt Trong NxDocument3 pagesCác Phím Tắt Trong NxLÊ VĂN ĐỨCNo ratings yet
- Parts List パーツリスト: Published in July 2016 2RVPL070 842RV120 First Edition 2016 年 7 月 初版 2RVPL010Document94 pagesParts List パーツリスト: Published in July 2016 2RVPL070 842RV120 First Edition 2016 年 7 月 初版 2RVPL010newalexdNo ratings yet
- Quality Management For Complaints From Customers (2FA - IN) : Test Script SAP S/4HANA - 08-05-20Document23 pagesQuality Management For Complaints From Customers (2FA - IN) : Test Script SAP S/4HANA - 08-05-20Subhadip GhoshNo ratings yet
- Sinumerik 801Document105 pagesSinumerik 801Yirgalem AddisNo ratings yet
- Wycena Gniazdka LegrandDocument2 pagesWycena Gniazdka LegrandHardy AncymonNo ratings yet
- Presentation TaCosDocument15 pagesPresentation TaCosRishu KumarNo ratings yet
- Unit Plan TemplateDocument4 pagesUnit Plan TemplateAoi KitsuneNo ratings yet
- Oracle Audit Vault - Data SheetDocument2 pagesOracle Audit Vault - Data SheetHot MaleNo ratings yet
- COMANDO SEGURIDAD Nivel CuentaDocument7 pagesCOMANDO SEGURIDAD Nivel CuentaMarciodet NavarroNo ratings yet
- XII CS - Term2 - Practicals (2021-22) - SolDocument13 pagesXII CS - Term2 - Practicals (2021-22) - SolKamal SinghNo ratings yet
- Eoy - CS (Vi) 23-24Document3 pagesEoy - CS (Vi) 23-24www.shahbazhaider165No ratings yet
- Network Programming QBankDocument13 pagesNetwork Programming QBankMohamed AhmedNo ratings yet
- DX DiagDocument31 pagesDX DiagJose Trix CamposNo ratings yet
- Assessment of VoIP E-Model Over 802.11 Wireless Mesh NetworkDocument5 pagesAssessment of VoIP E-Model Over 802.11 Wireless Mesh NetworkDwi PratiwiNo ratings yet