You might also like
- Geography Grade 11 ANotes and Worksheet On Topography Associated With Horozontally Layered RocksDocument13 pagesGeography Grade 11 ANotes and Worksheet On Topography Associated With Horozontally Layered RocksTheo MolotoNo ratings yet
- Mechanics Lagrangian and HamilitonianDocument56 pagesMechanics Lagrangian and HamilitonianTrevor Scheopner100% (1)
- QM PostulatesDocument11 pagesQM PostulatesMobashar AhmadNo ratings yet
- BR COREnew Rulebook v1.5 ENG-nobackground-lowDocument40 pagesBR COREnew Rulebook v1.5 ENG-nobackground-lowDavid Miller0% (1)
- Warehousing Functions and TypesDocument5 pagesWarehousing Functions and TypesporseenaNo ratings yet
- Notes On Partial Differential Equations (Theory)Document129 pagesNotes On Partial Differential Equations (Theory)Elhibari OthmaneNo ratings yet
- Postulates of QM - 3Document11 pagesPostulates of QM - 3Vijay PradhanNo ratings yet
- Finite Element 3Document23 pagesFinite Element 3Carlos GonzalesNo ratings yet
- FQT2023 2Document5 pagesFQT2023 2muay88No ratings yet
- 2017 HW1Document4 pages2017 HW1OmegaNo ratings yet
- Bosonic String TheoryDocument50 pagesBosonic String Theorysumairah1906No ratings yet
- 8.1 Equation of Parallel TransportDocument7 pages8.1 Equation of Parallel TransportSayantanNo ratings yet
- Exercise 1 2022Document3 pagesExercise 1 2022Shivang MathurNo ratings yet
- What's Important: Time-Independent Schrödinger EquationDocument5 pagesWhat's Important: Time-Independent Schrödinger Equationombraga1896No ratings yet
- Functionals Share Many of The Same Properties As FunctionsDocument11 pagesFunctionals Share Many of The Same Properties As FunctionsMohammed DawNo ratings yet
- 2.1. The General Least Squares Adjustment ModelDocument20 pages2.1. The General Least Squares Adjustment Modelulastuna2001No ratings yet
- MA3264CHAP7Document67 pagesMA3264CHAP7Nancy QNo ratings yet
- New Results in The Calculation of Modulation ProductsDocument16 pagesNew Results in The Calculation of Modulation ProductsRia AlexNo ratings yet
- On Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorsDocument12 pagesOn Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorshungkgNo ratings yet
- Diapositivas Larco AguirreDocument18 pagesDiapositivas Larco AguirreWilson LawrenteNo ratings yet
- CH01Document46 pagesCH01Alejandro CarbajalNo ratings yet
- An Introduction To Lagrangian and Hamiltonian Mechanics: Lecture NotesDocument59 pagesAn Introduction To Lagrangian and Hamiltonian Mechanics: Lecture Notesadam_87jktNo ratings yet
- Aero2258A Thin Aerofoil TheoryLecture NotesDocument42 pagesAero2258A Thin Aerofoil TheoryLecture NotesSakthi RameshNo ratings yet
- A Few Exact Sampling TechniquesDocument7 pagesA Few Exact Sampling TechniquesBenett555gggNo ratings yet
- On The Jacobian Question: August 2006Document73 pagesOn The Jacobian Question: August 2006kshaymalNo ratings yet
- ExtraExercise1 (1)Document13 pagesExtraExercise1 (1)angyruizhNo ratings yet
- Partial Differential Equations I: Basics and Separable SolutionsDocument20 pagesPartial Differential Equations I: Basics and Separable SolutionsbobpasxalNo ratings yet
- Bellman EquationDocument13 pagesBellman EquationsurajdhunnaNo ratings yet
- The Quantum Harmonic OscillatorDocument19 pagesThe Quantum Harmonic OscillatorSean MortaraNo ratings yet
- Multi Var Lockdown 14Document94 pagesMulti Var Lockdown 14ria paulNo ratings yet
- From Fourier Series To Fourier Integral: e X E, e eDocument10 pagesFrom Fourier Series To Fourier Integral: e X E, e evarun186No ratings yet
- 2 Quantum Theory of Spin Waves: 2.1 Charged Particle in An Electromagnetic FieldDocument35 pages2 Quantum Theory of Spin Waves: 2.1 Charged Particle in An Electromagnetic FieldchuneshphysicsNo ratings yet
- Solution Techniques For Models Yielding Ordinary Differential Equations (ODE)Document67 pagesSolution Techniques For Models Yielding Ordinary Differential Equations (ODE)Nikhil DewalkarNo ratings yet
- Wave EquationDocument14 pagesWave EquationSawon KhanNo ratings yet
- COHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationDocument18 pagesCOHEN - Mixed Finite Elements With Mass-Lumping For The Transient Wave EquationAndrés MercadoNo ratings yet
- Quantum Mech HandoutDocument153 pagesQuantum Mech HandoutFredrick MutungaNo ratings yet
- On Compact OperatorsDocument8 pagesOn Compact OperatorsPaul Mariatte BlueNo ratings yet
- Superficie de RevoluçãoDocument22 pagesSuperficie de RevoluçãomarceloNo ratings yet
- Resurgence in Geometry and Physics: Brent Pym Trinity Term 2016Document11 pagesResurgence in Geometry and Physics: Brent Pym Trinity Term 2016mqtrinhNo ratings yet
- Non-Associative Geometry and Discrete Structure of SpacetimeDocument11 pagesNon-Associative Geometry and Discrete Structure of SpacetimeIvan LoginovNo ratings yet
- Hyperbolic equations explainedDocument14 pagesHyperbolic equations explainedB Raghavendra BejgamNo ratings yet
- Limiting Behavior of Solutions of Subelliptic Heat Equations - Federica DRAGONIDocument13 pagesLimiting Behavior of Solutions of Subelliptic Heat Equations - Federica DRAGONIJefferson Johannes Roth FilhoNo ratings yet
- Fundamentals of Thermodynamics, Part 1: Nestor Azziz, PH.DDocument55 pagesFundamentals of Thermodynamics, Part 1: Nestor Azziz, PH.DTeka Derick TikumNo ratings yet
- 02 Comss 22 Acar-TurgayDocument12 pages02 Comss 22 Acar-TurgayMustapha MaaroufNo ratings yet
- 11of15 - Appendix B - Gaussian Markov ProcessesDocument14 pages11of15 - Appendix B - Gaussian Markov ProcessesBranko NikolicNo ratings yet
- Calculus of Variations: X X X X 0Document7 pagesCalculus of Variations: X X X X 0hammoudeh13No ratings yet
- GaugeDocument4 pagesGaugemaplebrandishNo ratings yet
- Latex Project Q9 PDFDocument6 pagesLatex Project Q9 PDFABHILASH SENGUPTANo ratings yet
- Quantum ExamplesDocument26 pagesQuantum ExamplesAbdalmoedAlaiashyNo ratings yet
- 06 Complex WavesDocument7 pages06 Complex Wavesamanda christineNo ratings yet
- Spectral Methods in CFD: Fourier and Chebyshev MethodsDocument12 pagesSpectral Methods in CFD: Fourier and Chebyshev MethodsMarc Rovira SacieNo ratings yet
- General Relativistic Quantum MechanicsDocument5 pagesGeneral Relativistic Quantum MechanicsFarhad HossainNo ratings yet
- Ga Fluid DynamicsDocument10 pagesGa Fluid DynamicsJames ChapelNo ratings yet
- SPH Models For Geo-Disasters: 2.1 Basic Concept of SPHDocument28 pagesSPH Models For Geo-Disasters: 2.1 Basic Concept of SPHManish Kumar SinghNo ratings yet
- Partial DerivativeDocument71 pagesPartial Derivative9898171006No ratings yet
- Spectral Analysis of Nonlinear Ows: Clarencew - Rowley, Shervinbagheri, Philippschlatter Dans - HenningsonDocument13 pagesSpectral Analysis of Nonlinear Ows: Clarencew - Rowley, Shervinbagheri, Philippschlatter Dans - HenningsonmapachorraNo ratings yet
- 06_complex_wavesDocument7 pages06_complex_wavesalexiusfaustineNo ratings yet
- International Journal Eng Science 1966 n1 Str53 68Document17 pagesInternational Journal Eng Science 1966 n1 Str53 68Rodolfo Sergio Cruz FuentesNo ratings yet
- Lecture 1: Perturbative Renormalization: X V V V ' V X ' VDocument15 pagesLecture 1: Perturbative Renormalization: X V V V ' V X ' VluisdanielNo ratings yet
- Analysis On The Derivation of The Schrödinger Equation With Analogy To Electromagnetic Wave EquationDocument7 pagesAnalysis On The Derivation of The Schrödinger Equation With Analogy To Electromagnetic Wave EquationKhalil SukurNo ratings yet
- Pacific Journal of Mathematics: The Flexure of A Non-Uniform BeaDocument11 pagesPacific Journal of Mathematics: The Flexure of A Non-Uniform BeaingssNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- MAXsys 2510 Meterin FamilyDocument52 pagesMAXsys 2510 Meterin FamilyAbel NinaNo ratings yet
- Course Registration Slip MBA 2023Document3 pagesCourse Registration Slip MBA 2023Piyush RaghuwanshiNo ratings yet
- Art of Public Speaking 11th Edition Lucas Test BankDocument25 pagesArt of Public Speaking 11th Edition Lucas Test BankBryanMillernicy100% (49)
- Unit 10 Conic Sections ProjectDocument8 pagesUnit 10 Conic Sections Projectapi-290873974No ratings yet
- Neco Catlog 4 FoldDocument2 pagesNeco Catlog 4 FoldSanket PhatangareNo ratings yet
- Margie's Group Travel Presents The Sparks Rebellion 1855-1857Document12 pagesMargie's Group Travel Presents The Sparks Rebellion 1855-1857fcmitcNo ratings yet
- Intro to Phenomenological ApproachesDocument11 pagesIntro to Phenomenological ApproachesToshi ToshiNo ratings yet
- Summative Test 1Document3 pagesSummative Test 1Glenda AstodilloNo ratings yet
- Current Openings: The Sirpur Paper Mills LTDDocument3 pagesCurrent Openings: The Sirpur Paper Mills LTDMano VardhanNo ratings yet
- ASSESSMENTS Module 1 - Cortezano, ZyraDocument1 pageASSESSMENTS Module 1 - Cortezano, ZyraZyra Mae Cortezano100% (1)
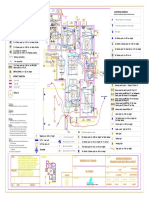
- Varun Valanjeri Electrical Layout-3Document1 pageVarun Valanjeri Electrical Layout-3ANOOP R NAIRNo ratings yet
- 250 - Windows ShellcodingDocument116 pages250 - Windows ShellcodingSaw GyiNo ratings yet
- The Coffee House-Group 8Document18 pagesThe Coffee House-Group 8Thanh Huyền TrầnNo ratings yet
- Vistara News and Tie UpDocument4 pagesVistara News and Tie UpDimple RathodNo ratings yet
- DocumentDocument14 pagesDocumentAnjali RajaNo ratings yet
- Lesson 19 - Preparation of Capital Statement and Balance SheetDocument6 pagesLesson 19 - Preparation of Capital Statement and Balance SheetMayeng MonayNo ratings yet
- Pornhub 2021 Year in Review defines searchesDocument57 pagesPornhub 2021 Year in Review defines searchesRickPornAdams RickNo ratings yet
- Call For Applications To JASTIP-Net 2021 Guidelines For ApplicantsDocument6 pagesCall For Applications To JASTIP-Net 2021 Guidelines For ApplicantsNadya IrsalinaNo ratings yet
- Theory of Machines Kinematics FundamentalsDocument31 pagesTheory of Machines Kinematics FundamentalsmungutiNo ratings yet
- 18 MN216 Fluid Mechanics IDocument2 pages18 MN216 Fluid Mechanics Ijorge luisNo ratings yet
- 1 The Importance of Business ProcessesDocument17 pages1 The Importance of Business ProcessesFanny- Fan.nyNo ratings yet
- Modern tobacco marketing fundamentalsDocument6 pagesModern tobacco marketing fundamentalsAbdus SalamNo ratings yet
- Physico-Chemical Characteristics and Afatoxins Production of Atractylodis Rhizoma To Diferent Storage Temperatures and HumiditiesDocument10 pagesPhysico-Chemical Characteristics and Afatoxins Production of Atractylodis Rhizoma To Diferent Storage Temperatures and HumiditiesWSNo ratings yet
- Present Simple and Present Progressive TensesDocument4 pagesPresent Simple and Present Progressive TensesHân NguyễnNo ratings yet
- Edexcel iGCSE ICT Software MindmapDocument1 pageEdexcel iGCSE ICT Software MindmapPaul ZambonNo ratings yet
- Business Studies Project: Made By: Rahil JainDocument29 pagesBusiness Studies Project: Made By: Rahil JainChirag KothariNo ratings yet
- Journeys B2 Teacher's Resource Pack: Grammar ThemesDocument2 pagesJourneys B2 Teacher's Resource Pack: Grammar ThemesMiriam SanchezNo ratings yet